- realvirtual.io Forum
-
 Questions
Questions

Pick up cube and conveyer belt stop at sensor
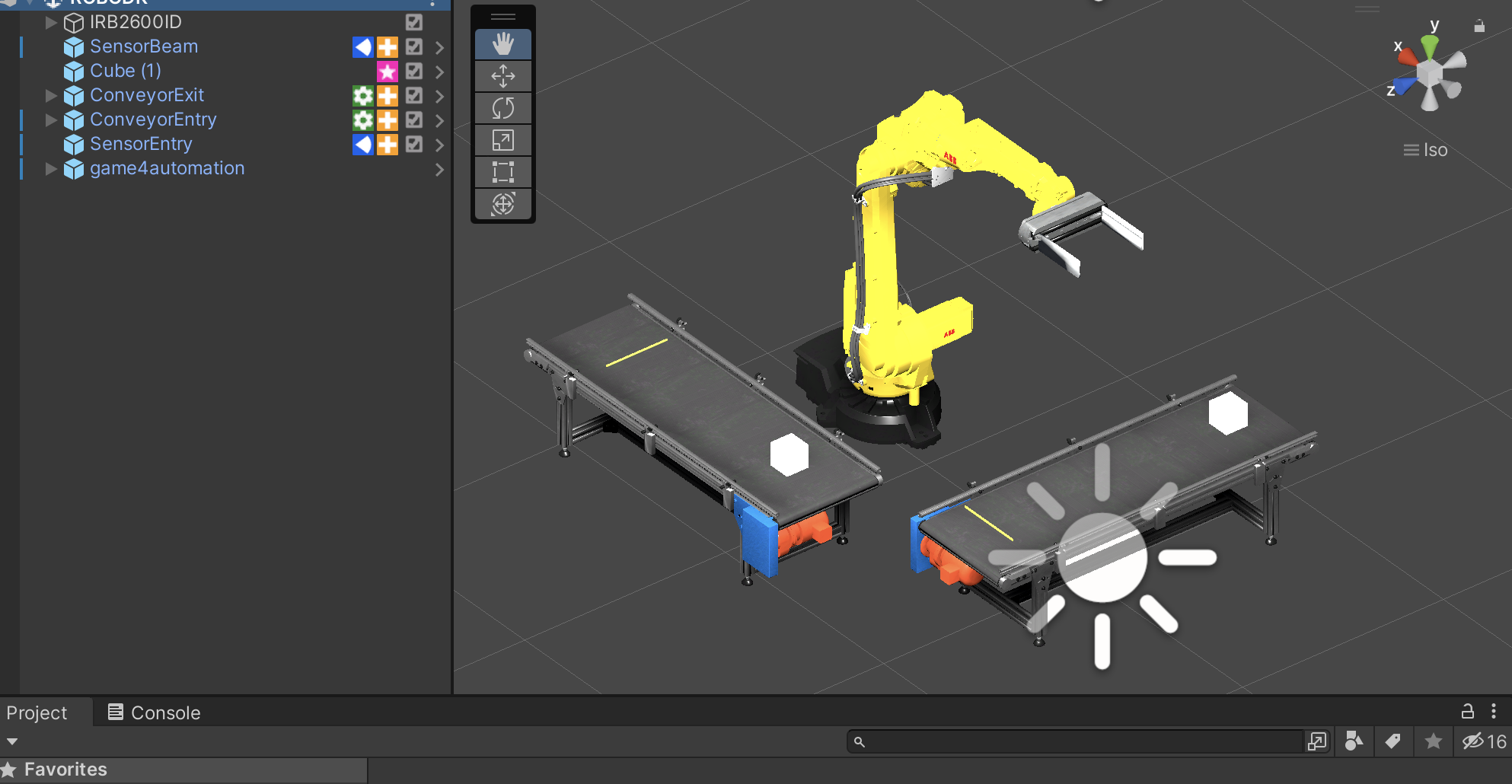
what is the best way to pick up the cube on the conveyer ? Should i use the grip or gripper script?
and how can i make the conveyer stop, when the cube is detected by the sensor? is there an alternative solution for stopping the conveyer at a certain destination?
Answer

Please check the demo model or this demo which shows several ways for gripping parts: Assets/game4automation/Scenes/DemoGripping.unity
To make the conveyor stop you can use a script (you need to check the property occupied of the sensor and you can stop the drive by Drive.JogForward = false.
Or you can use Unitys Visual Scripting:
https://realvirtual.io/documentation/current/unityvisualscripting.html
Another possiblity (only with Professional Version) is to use LogicSteps:
https://realvirtual.io/documentation/current/logicsteps.html
You can stop the Conveyor (in a script or by using visual scripting) as soon as Drive.CurrentPosition is greater than a certain value.
what exactly makes the robot move? the "animator" or the drive script? is it possible to automatize the movements of the robot?
In realvirtual.io Professional, inverse kinematics for robots is included. You can also use an external tool like RobotDK or ABBRobotStudio to move the robot. These interfaces are also included only in the Professional version. The Starter version does not include a solution for inverse kinematics - not even the ABB RobotStudio or RobotDK interfaces. For this reason, we used Unity animations to set the robot in motion for the generic demo model. However, this is a relatively inconvenient task to move all axes to reach a certain position.
Customer support service by UserEcho

Please check the demo model or this demo which shows several ways for gripping parts: Assets/game4automation/Scenes/DemoGripping.unity
To make the conveyor stop you can use a script (you need to check the property occupied of the sensor and you can stop the drive by Drive.JogForward = false.
Or you can use Unitys Visual Scripting:
https://realvirtual.io/documentation/current/unityvisualscripting.html
Another possiblity (only with Professional Version) is to use LogicSteps:
https://realvirtual.io/documentation/current/logicsteps.html
You can stop the Conveyor (in a script or by using visual scripting) as soon as Drive.CurrentPosition is greater than a certain value.