- realvirtual.io Forum
-
 Questions
Questions

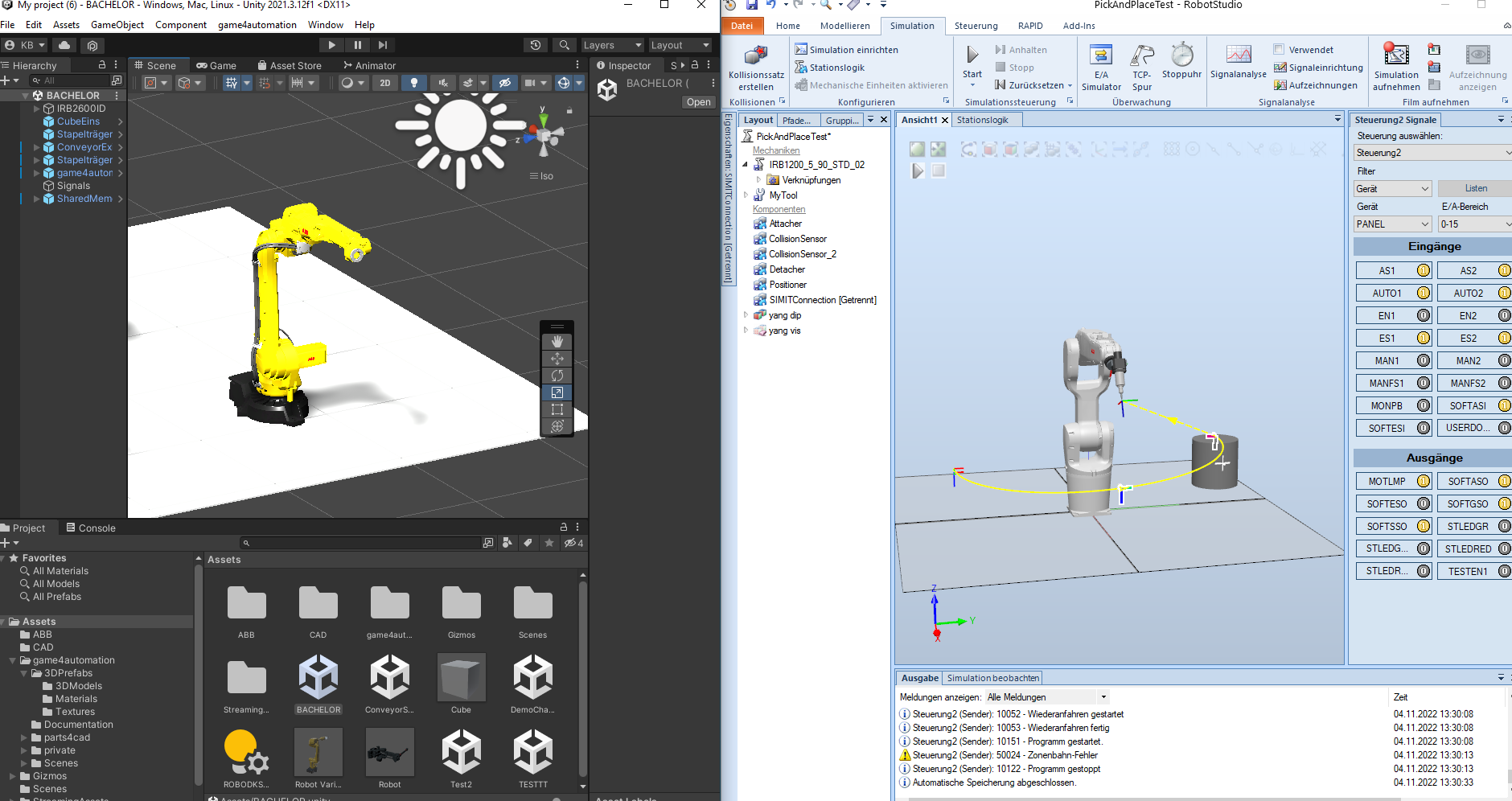
RobotStudio Pick&Place Task auf Unity übertragen
Ich möchte diese pick and place aufgabe von robotstudio auf unity übertragen. wie ist das möglich?
Answer
Hallo Kadir,
so wie ich das verstehe, musst du nur die Achsenwerte und Binärsignale für Greifer auslesen und dann entsprechend mit Unity koppeln. Auf alle Signale kann man über den Namen in der IO-Liste in RobotStudio zugreifen.
Kannst du bitte etwas mehr dazu schreiben, mit welchem Schritt du Probleme hast?
Mfg
Hallo,
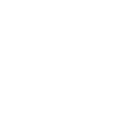
Ich versuche den Würfel (Beispiel) mit dem Roboter zu greifen indem ich den Roboter aus RobotStudio steuere.
1. Der roboter in unity fährt nicht die selbe Bahn ab wie der Roboter aus robotstudio, sondern spiegelverkehrt und die targets werden nicht so angefahren wie gedacht.
2. der Roboter in UNity greift den Würfel nicht. Ich habe der 6. Achse eine "Gripper" Komponente hinzugefügt.
Im endeffekt möchte ich erreichen dass Roboter in Unity ein Objekt aufnehmen und woanders platzieren kann.

Hallo,
ich vermute dass Sie das Robotermodell aus der Demoszene genommen haben. Das ist absichtlich verzerrt und verfälscht. Das Robotermodell muss die selbe Kinematik (Dimensionen und Ausrichtungen) wie der Reale Roboter haben. Den Roboter kann man mit Drives, dem ABB Datenblatt und den 3D Daten sich zusammenbauen. In YouTube finden sich bei uns ein Tutorial wie das im Grundsatz geht.
Gruß
die kinematiken sind doch aber die selben oder nicht ? und die roboter sind auch vom selben Modell
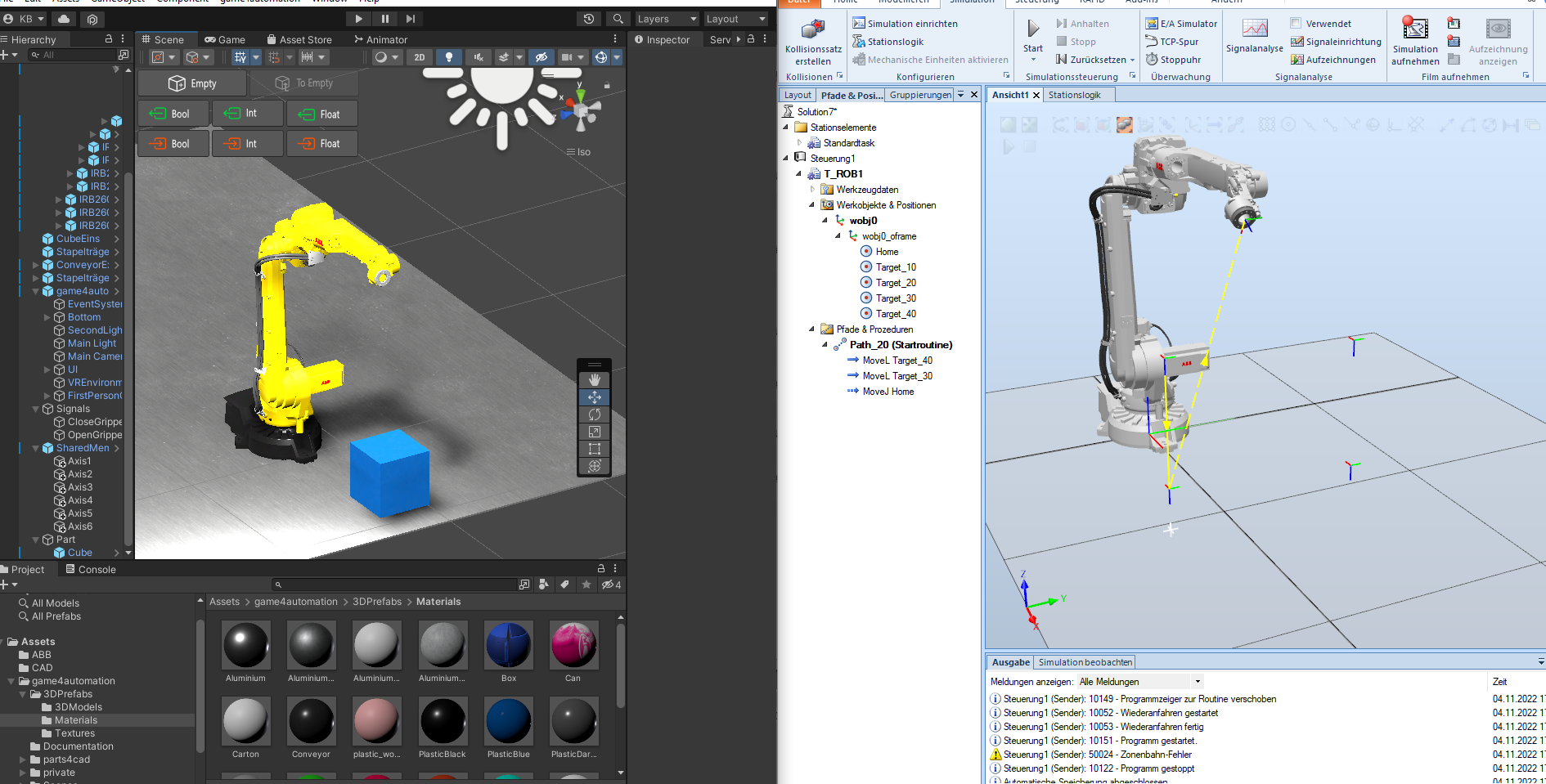
Ich weiß nicht, welches Robotermodell Sie genutzt haben - das im Demomodell entspricht in den Abmaßen nicht dem realen Roboter. Es wurde absichtlich verfälscht. Da dann die Achslängen und Positionen nicht denen des realen Abb entsprechen ist der TCP immer falsch. Sie müssen sicherstellen ein richtig skaliertes Robotermodell zu haben, das 1:1 dem in ABB Robotstudio entspricht. Ein richtiges Robotermodell hat vom Roboternullpunkt alle Achsen an der Position wie sie dem Datenblatt entsprechen. Auch die positive Richtung der Drives muss der des Datenblatts entsprechen. Alle notwendigen Informationen - Step Modell und Datenblatt sind bspw. auf der ABB Website zu finden. Mit etwas Übung ist ein neuer Roboter in max 30min erstellt. Ein paar korrekt parametriete Robotermodelle finden sich auch in unserem Community Bereich:
https://github.com/game4automation/game4automation-Community
Hallo Kadir,
GITHUB repositories können nur gesamthaft als ZIP heruntergeladen werden. Der Roboter besteht aus mehr als nur als dem FBX, es muss auch das Prefab kopiert werden. Am Besten das gesamte Verzeichnis des Robotertyps in Unity reinkopieren.
Hallo,
Ich bin Student und mache die Simulation für meine Bachelorarbeit. Die Aufgabe ist es, eine Pick and Place Aufgabe mit einem Industrieroboter in Unity zu simulieren.
Customer support service by UserEcho

Ich weiß nicht, welches Robotermodell Sie genutzt haben - das im Demomodell entspricht in den Abmaßen nicht dem realen Roboter. Es wurde absichtlich verfälscht. Da dann die Achslängen und Positionen nicht denen des realen Abb entsprechen ist der TCP immer falsch. Sie müssen sicherstellen ein richtig skaliertes Robotermodell zu haben, das 1:1 dem in ABB Robotstudio entspricht. Ein richtiges Robotermodell hat vom Roboternullpunkt alle Achsen an der Position wie sie dem Datenblatt entsprechen. Auch die positive Richtung der Drives muss der des Datenblatts entsprechen. Alle notwendigen Informationen - Step Modell und Datenblatt sind bspw. auf der ABB Website zu finden. Mit etwas Übung ist ein neuer Roboter in max 30min erstellt. Ein paar korrekt parametriete Robotermodelle finden sich auch in unserem Community Bereich:
https://github.com/game4automation/game4automation-Community