- realvirtual.io Forum
-
 Fragen
Fragen

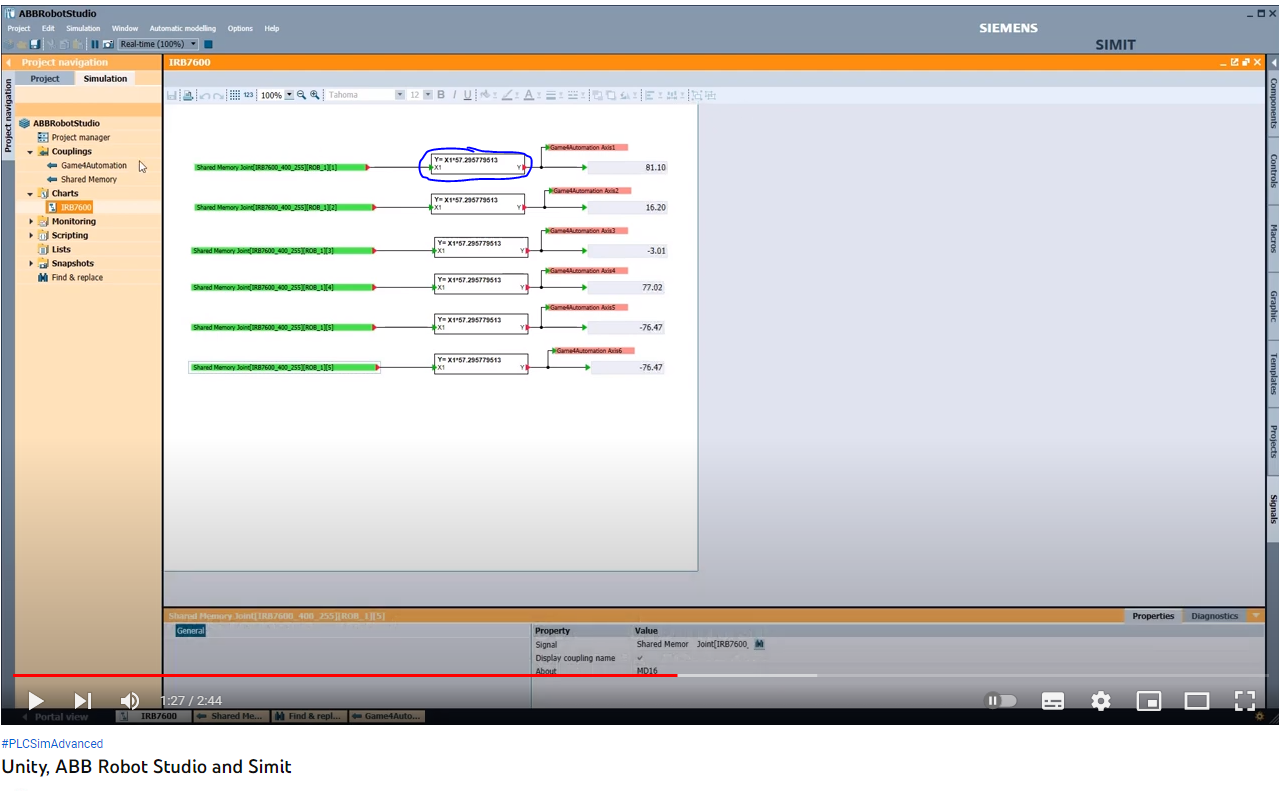
Simit Diagramm
Hallo,
Ich verstehe nicht ganz warum der X1 Wert mit 57,3 multipliziert wird.
Wie kommt der Wert zur stande?
Ich bemerke bei meinem Roboter eine veränderte Bewegung sobald ich den Multiplikator verändere.
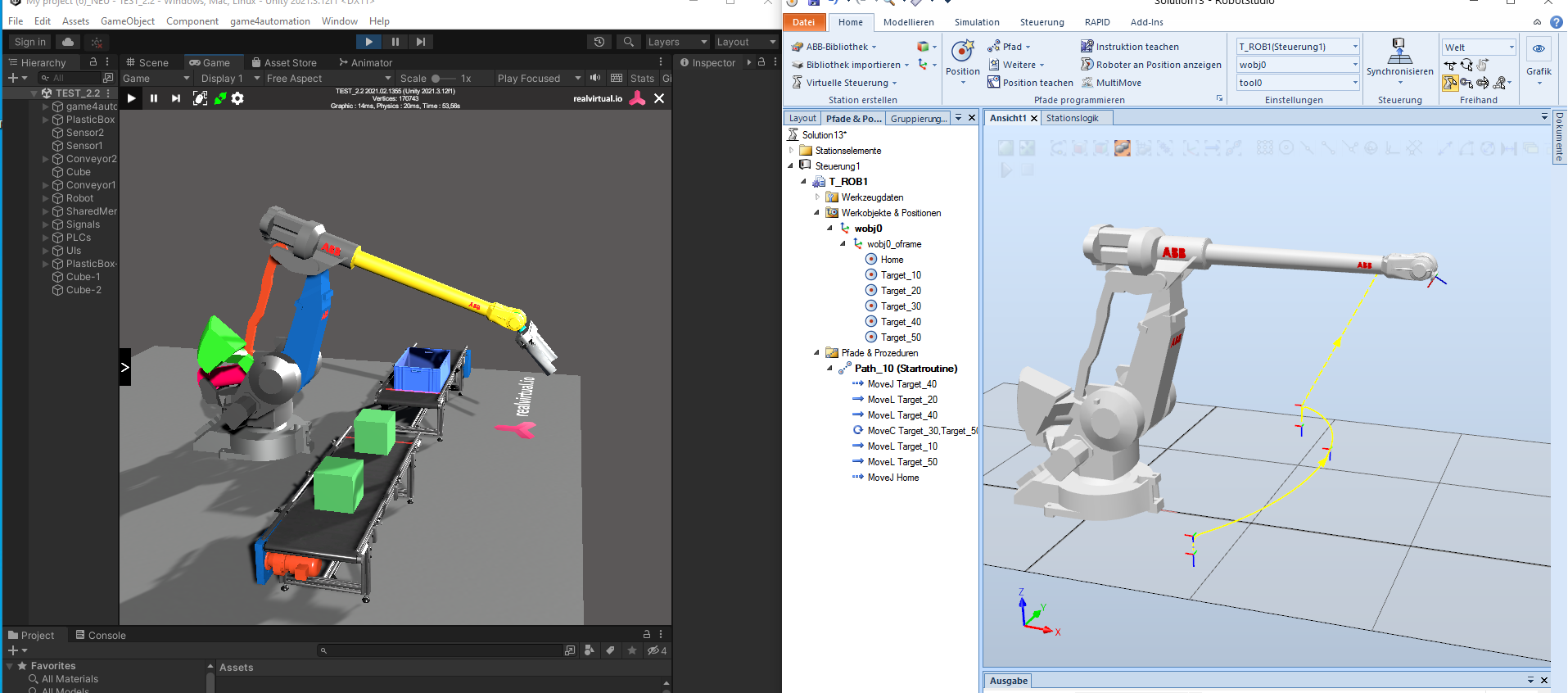
Wie richte ich es so ein, sodass der Roboter in Unity EXAKT die selbe Route abfährt wie der Roboter aus Robotstudio?
Antwort

Simit muss an realvirtual für rotatorische Achsen Grad übergeben (als Float).
Wenn nun der Roboter die richtige Kinematik (Achspositionen) sowie die richtige Achsrichtungen hat so ist die Bewegung 1:1 identisch.
Was ABB RobotStudio übergibt weiß ich nicht genau. Wichtig ist, dass die Nullpunkte der Achsen gleich definiert sind (ansonsten muss mit einem Offset gearbeitet werden). Es gibt ja auch noch Radianten als Winkelmessung. Dann muss entsprechend umgerechnet werden.
Am Besten Sie gehen hier ingenieursmäßig vor und fahren den Roboter mal auf 0 Grand und dann auf z.B. auf 90 Grad. Dann können Sie die Werte wie sie von ABB RobotStudio kommen sich anschauen und den Zusammenhang zwischen den Werten herstellen.
Ich bemerke grad, dass wenn ich die 2. Roboterachse bewege die Orientierung der 3. Achse sich nicht ändert, aber die 3. Achse in Unity schon. Ich habe den Roboter so zusammengebaut wie in Ihrem Tutorial gezeigt.
Soweit ich mich erinnere haben einige Robotersteuerungen in der Ausgabe der Achsposition einen Zusammenhang zwischen 2. und 3. Achse - Sie müssen die Achsen einzeln bewegen und den Zusammenhang rausfinden.
Customer support service by UserEcho

Simit muss an realvirtual für rotatorische Achsen Grad übergeben (als Float).
Wenn nun der Roboter die richtige Kinematik (Achspositionen) sowie die richtige Achsrichtungen hat so ist die Bewegung 1:1 identisch.
Was ABB RobotStudio übergibt weiß ich nicht genau. Wichtig ist, dass die Nullpunkte der Achsen gleich definiert sind (ansonsten muss mit einem Offset gearbeitet werden). Es gibt ja auch noch Radianten als Winkelmessung. Dann muss entsprechend umgerechnet werden.