- realvirtual.io Forum
-
 Questions
Questions

0
Answered
Pick based on Sensor
Hallo,
ich habe dem Würfel einen Sensor und Box Collider zugeordnet und will dass der Greifer ihn aufnimmt sobald der Würfel im Bereich des Greifers ist. wo ist der fehler? anschließend soll der Greifer den Würfel in eine Box ablegen per "place load on mu".
Customer support service by UserEcho

?
Wofür benötigt der Würfel ein Sensor Script? In der Doku steht doch eigentlich beschrieben https://doc.realvirtual.io/components-and-scripts/grip#picking-mus. Directly Grip The grip action is directly started when a part is detected by the Sensor defined in Part To Grip. Wenn du Directly Grip aktiviert, müsste der Würfel aufgenommen werden sobald er den Gripper Sensor auslöst
ja das mit dem Greifen klappt zwar, aber das Ablegen nicht. Weiss immer noch nicht woran es liegt
Wie hast du das Ablegen denn konfiguriert?
Ich habe mehrere Sachen ausprobiert. Ich habe der Box einen Sensor zugewiesen sodass wenn der Würfel innerhalb des Breichs von der Box ist, dass der Greifer den Würfel ablegt. Hast du eine Idee wie das funktionieren kann?
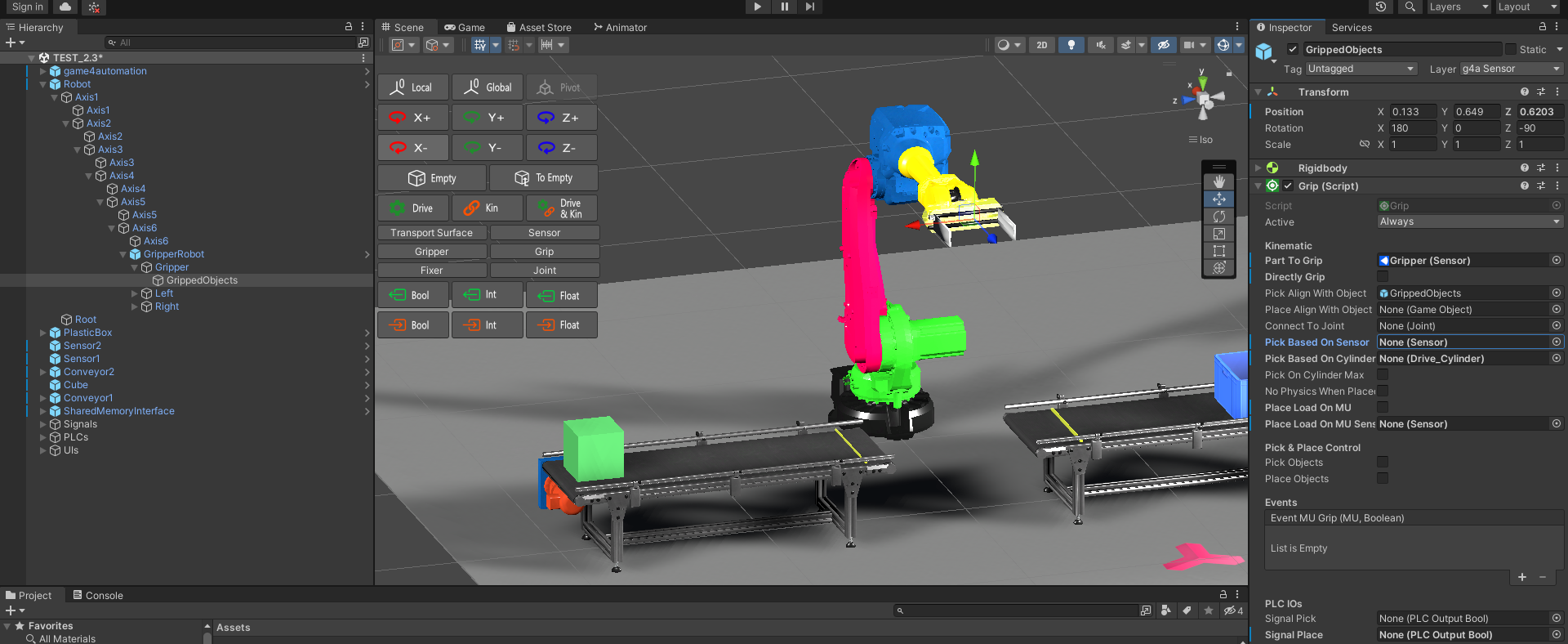
Ich würde es nicht komplizierter als nötig machen und zuerst mal einfach beginnen. Ggf. auch auf das Align zuerstmal verzichten. In der Box ein Sensor macht keinen Sinn. Es heißt auch "Pick based on Sensor" und nicht "Place based on Sensor". Das Ablegen muss im allgemeinen irgendeine Steuerung veranlassen. Also die Robotersteuerung wenn sie am Ende des Pfades ist oder ein Script in Unity das den Roboter steuert. Vielleicht wird er ja auch nicht abgelegt weil er gleich wieder gegriffen wird. Bei einer derartigen Anwendung sind normalerweise Signale in "SignalPick" und "SignalPlace" die ein Script oder die Robotersteuerung steuert. Ich sehe hier keine Signalverknüpfung - d.h. ich vermute dass das Ablegen in der Grip Componente nicht gestartet wird. Im allgemeinen Demomodell ist ein Bespiel Assets/game4automation/Scenes/DemoGame4Automation.unity und es gibt einige Beispiele in Assets/game4automation/Scenes/DemoGripping.unity. Einfach genau so nachbauen, dann funktioniert es auch sicher.
Da du anscheinend nicht willst dass das Greifen durch die Zangen deines Roboters geschieht sondern bei Kontakt gegriffen wird, ist es fürs spätere Ablegen am einfachsten die PLC IOs des Grip Script zu verwenden. Dann könntest du einfach, wenn der Sensor des Greifers den Würfel erkennt, Signal Pick true setzen und sobald sich der Greifer am Zielort über der Kiste befindet Signal Place true setzen. Falls der Würfel Anschließend ein Child Element der Box sein soll, musst du im Grip Script Place Load On Mu aktivieren und den Sensor der die Box erkennt in Place Load On MU Sensor hinterlegen. Hier ein Beispiel Video g4a.mp4