Your comments
Hi, I think we need a teams support session. We don't have Allen Breadley PLCs here, we checked before release with an US based customer. What is your Time Zone and when could we do a Teams call. Might be that we need to debug in Unity. Is the Console Log in Unity giving any hints?
I think you should do this via the AGX menu. Sorry for the late reply, I am currently in vacation and the only one who knows in detail the AGX interface. Hopefully you already solved this.
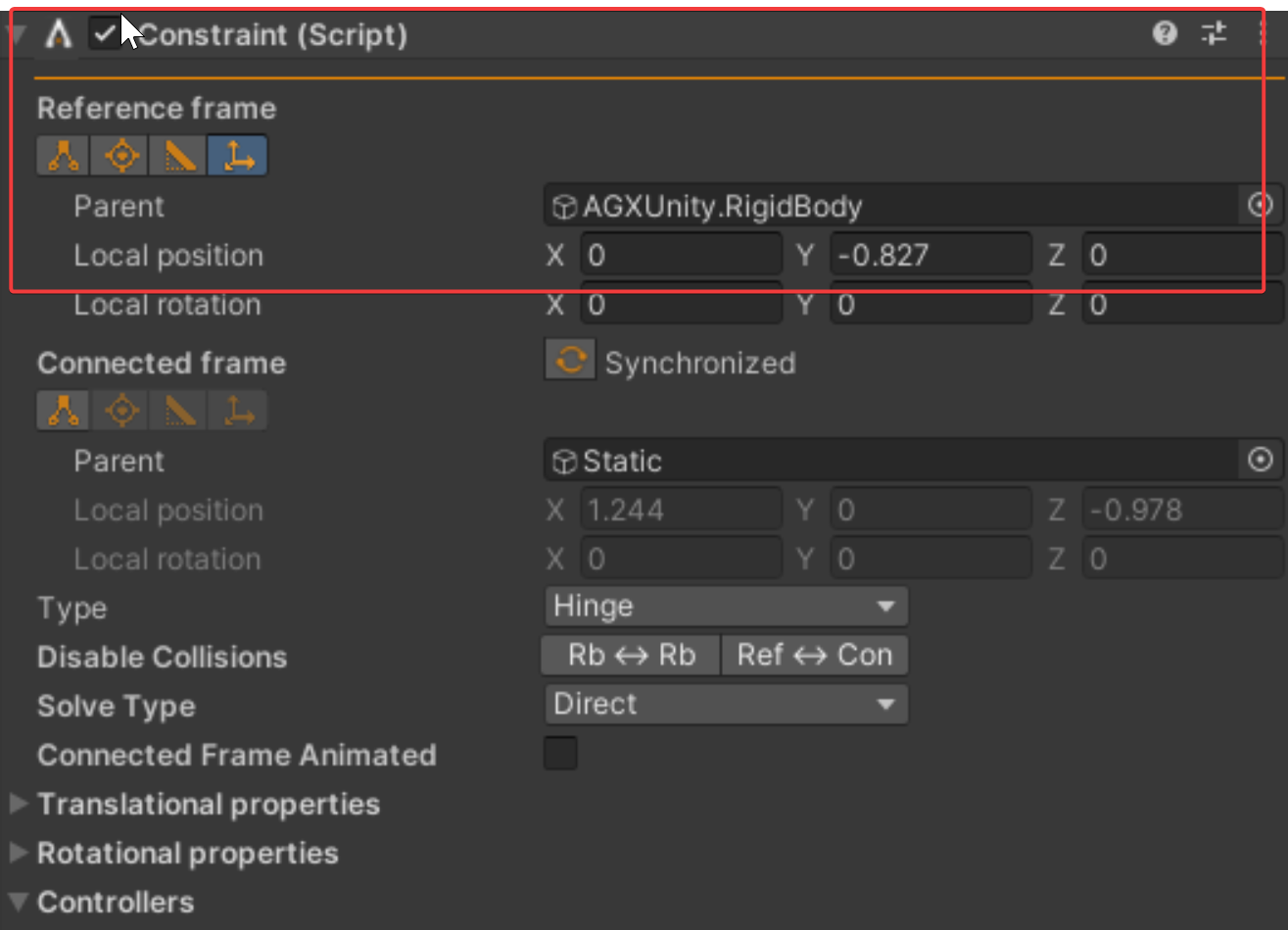
Hi Miel, maybe mistake on my side. you need to define the constraints in a separated constraint script - not in the rigidbody itself. like this:
Hi Miel,
It seems that AGX has changed something in their API. The AGX Constraint Component appears to be missing and is somehow merged with the RigidBody. I debugged the issue but haven’t found a solution yet to access the Constraint within the RigidBody. This seems to be a recent change, as the AGX documentation still shows the Constraint Component as a separate entity.
I’ve already reached out to AGX support and hope to receive an answer soon. In the meantime, you could try using an older version of AGX if you have access to one. I would recommend using a version that’s about a year old.
Apologies for not having a direct solution right now.
Best regards,
Thomas
Hi Miel,
was not able to finish it today but I will be working tomorrow morning. Will let you know hopefully how to fix tomorrow morning.
Best regardds
Thomas
Hi,
will check it later, but would be in the evening. Received a license and will need to check.
Best regards
Thomas
Hi, you could implement your own "Behavior Model" for the Articulated body with a public PLCInputFloat.
In the fixedupdate of your code you write MyPlcInputFloat.Value = ArticulatedBody.Rotation .
This is just dummy code but I think you know how to get the correct rotation of your articulated body.
Customer support service by UserEcho


Thanks for the feedback. If you have some information we can add to the docs that would be very helpfull because we are not AB Experts.
You can use old versions - you should be able to login here and download old releases:
https://download.realvirtual.io/download