Your comments
I didn't use CAD updater, I pressed re-import (pixyz) by accident and discovered that all my groups and colliders where gone. I never tested CAD updater, but I have to find out how these imported prefabs work together with CAD updater.
I found the problem. My besthttp files are absent, the zip file only contained folders.
I still have the compile errors and I traced it to:
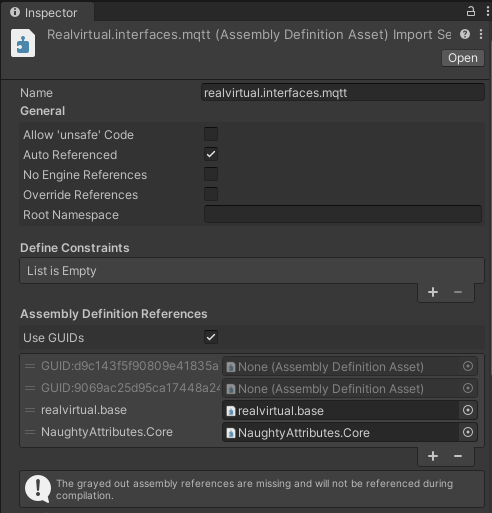
I have to add the assembly definition references, but those are not know within the environment. com.tivadar.best.http and com.tivadar.best.mqtt are copied in the assets folder.
Thanks, Your application should set it back. caused my confusion. It is a commercial application, I will look for the possibilities to purchase support hours.
My application code is in a separate standalone application that communicates with the mqtt broker. What do you mean with my code in fixedupdate? Do you advice to modify CalcFixedUpdate() in the drive_destinationmotor script?
Is there a risk that isdriving becomes true and false again before my application knows in case of very small moves?
Your application should set it back.
as long as I don't have the command style interface I have to work with the PLC signal interface. What would you recommend for set back behavior?
- set true, wait ... ms, set false
- set true, check isdriving, set false
- set true, check isatdestionation, set false
How to deal with a mismatch in order/timing of the outputs and inputs?
I obtained the Best MQTT Bundle with a download link from realvirtual, because realvirtual purchased a license
for me on the Unity Asset Store. I expect that I am using V3 because the link is from 2024.
With those files I was not able to reference it via the package manager, I only have the 3 directories and no unity package file.
My own Drive Behavior Script would be the way forward, but at the moment I am not feeling comfortable to explore this direction with my limited c# knowledge.
Maybe a small example could help, I think I need to:
- add a custom interface to send/receive messages through tcp-ip or udp, I could use the udp interface as example
- modify drive behavior script by removing PLC like signals and replacing them by a message decoder and if statements to call the right public methods of the drive
I have no idea yet how to make the connection between message in the interface and the drive behavior script, could you give me some direction?
Customer support service by UserEcho


I read a little bit more about this subject in the Unity manual and I think I should add a rigidbody component to the MU and disable gravity/ enable kinematics. Am I right?