Your comments
I tested the HiveMQ broker and this error appeared
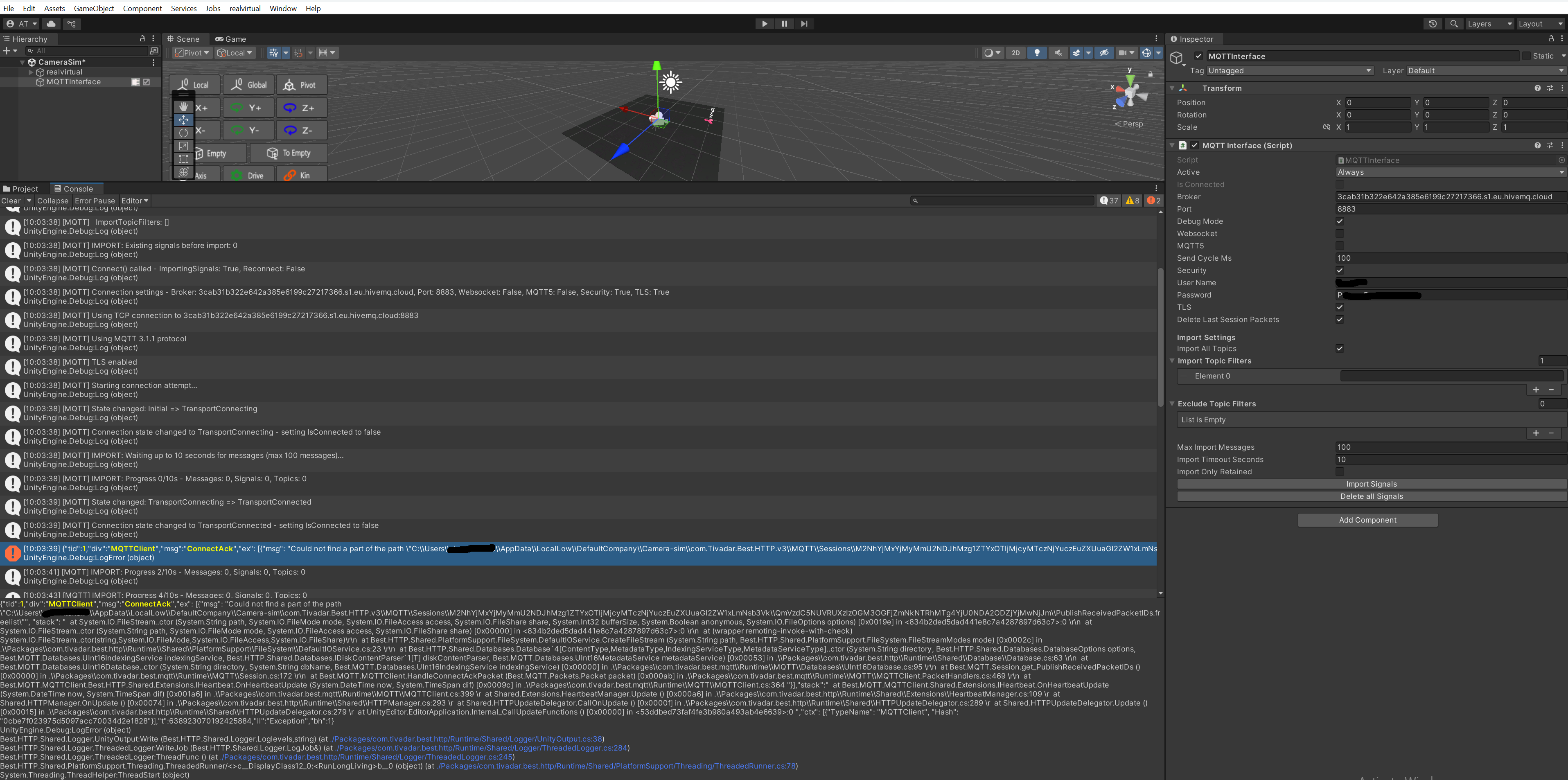
For some reason, it can’t find the path. I checked, and both the path and the file exist.
If I delete all from Sessions folder, Unity properly creates everything that is missing.
C:\Users\MyName.LastName\AppData\LocalLow\DefaultCompany\Camera-sim\com.Tivadar.Best.HTTP.v3\MQTT\Sessions\M2NhYjMxYjMyMmU2NDJhMzg1ZTYxOTljMjcyMTczNjYuczEuZXUuaGl2ZW1xLmNsb3Vk\QmVzdC5NUVRUXzIzOGM3OGFjZmNkNTRhMTg4YjU0NDA2ODZjYjMwNjJm

"Please drag and drop this into your project and check if it is solving your problem"
I understood it was supposed to be just drag and drop :)
Actually, it has to be imported. Good news – it finally works!!
Tomorrow I will test whether the connection with the HiveMQ broker is okay, and I’ll let you know.
If it's in non-Play Mode, then gets stuck during import and I have to do an End Task on Unity
As I mentioned before, the local broker works without any problems
I have many projects, and everything is stable with Unity 2022. At the moment, we don’t have the resources to switch to Unity 6 and migrate all the projects right now.
I’ve already tested the realvirtual 6 beta version with Unity 2022, and there are many errors during migration. As you’ve already mentioned, it’s risky.
I tested the Siemens Simit interface with the beta, and there’s a missing script, plus the “Update Signal Simit” button is missing — while everything works fine in the older version.
Additionally, I’ve already purchased the full BEST package. I believe we should focus on resolving this issue. I’ve already promised clients that the connection and simulation are possible.
I need to finish the demo by Wednesday.
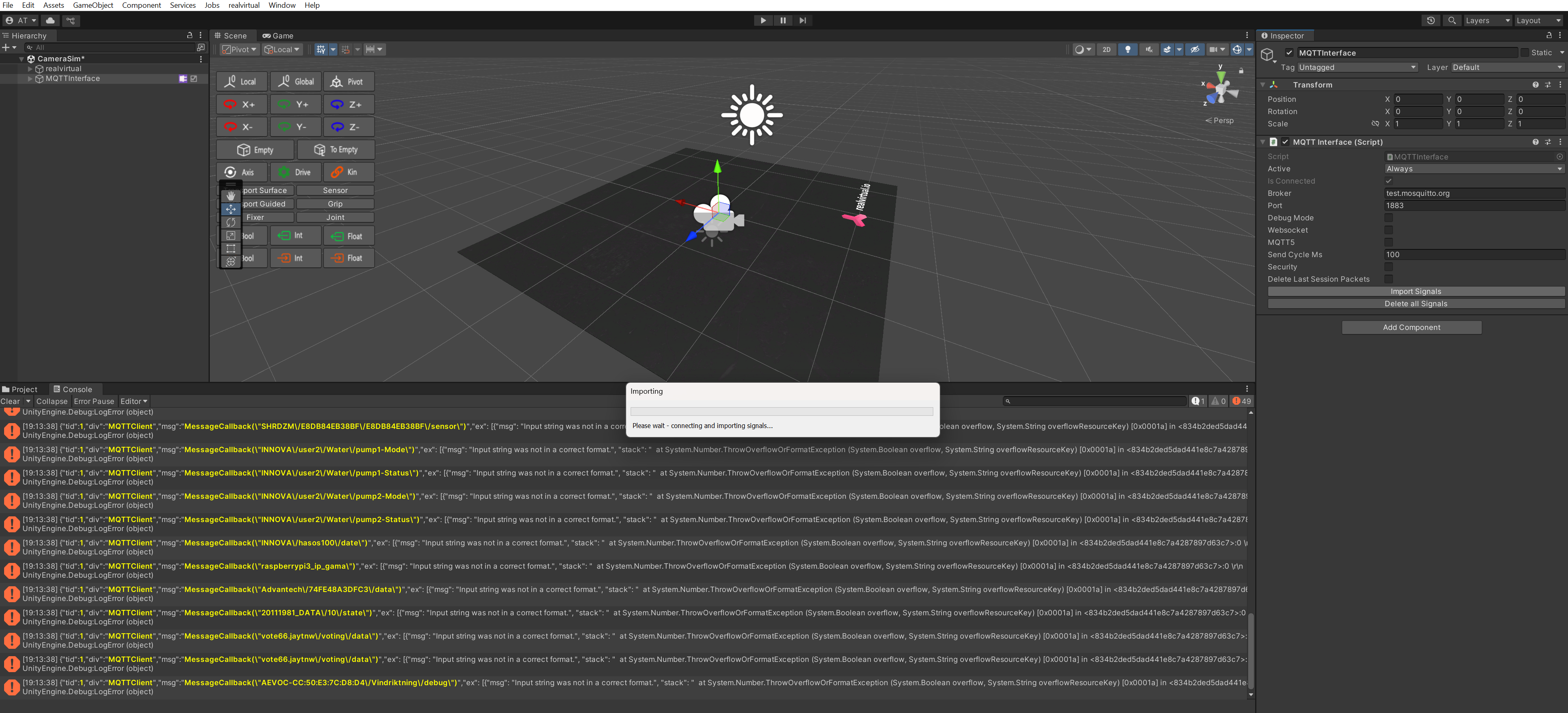
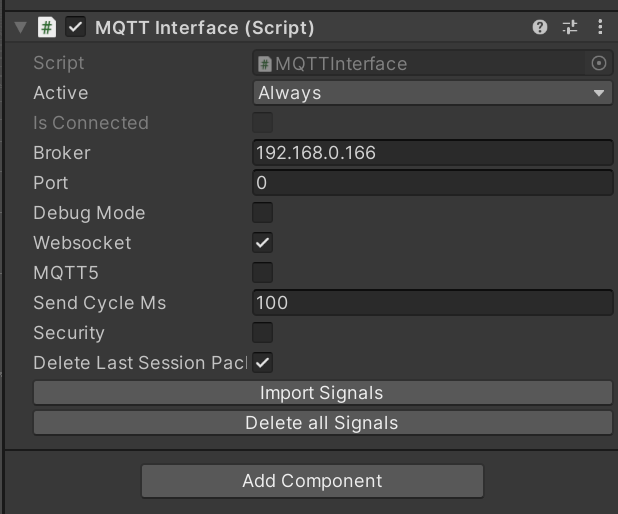
I tested it and the same problem occurs
The real problem occurs when it needs to import topics.
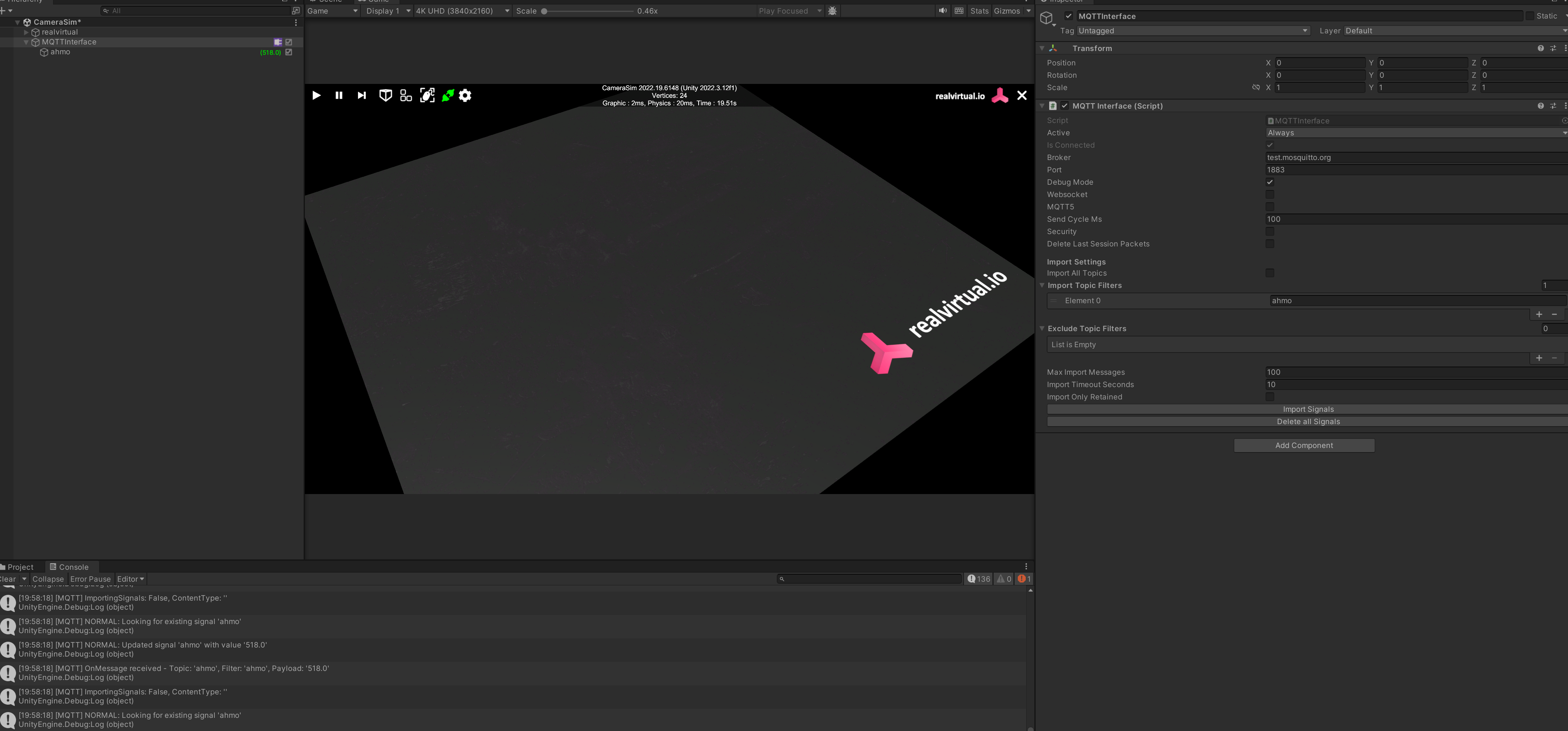
mosquitto broker hierarchy
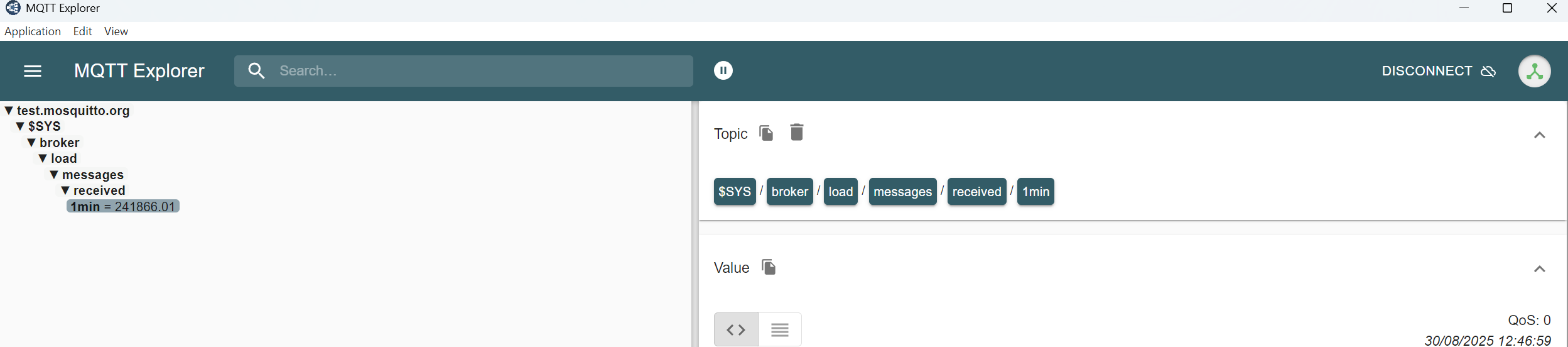
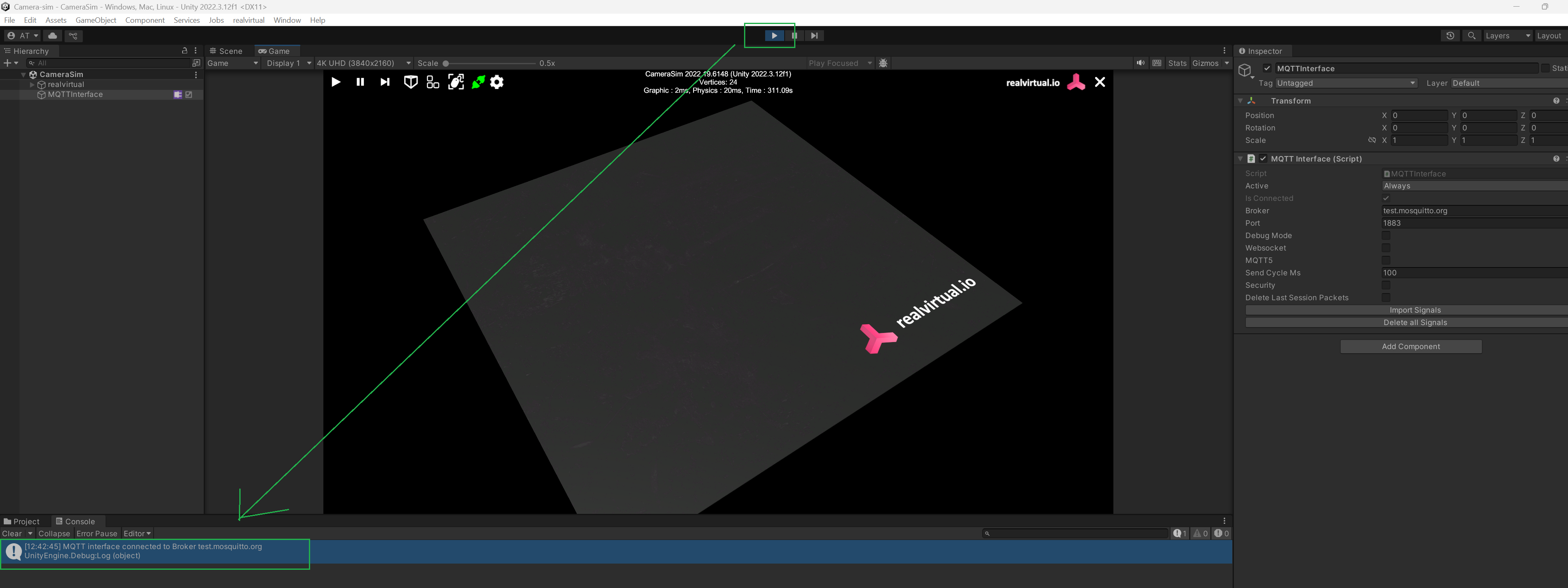
It can connect
But it cannot import

Full error after pressing the Import Signals button

Did you use my BEST.HTTP package or yours?
Is it possible that for some reason it cannot store data on my Host PC?
Or am I doing something wrong?
New fresh Unity project created!
Tested with the Mosquitto test broker "test.mosquitto.org" and port 1883, but the same error occurs.
I deleted everything in the Session folder, but nothing helps.
I do not have this problem when communicating with Python code — only with the Unity realvirtual MQTT interface.
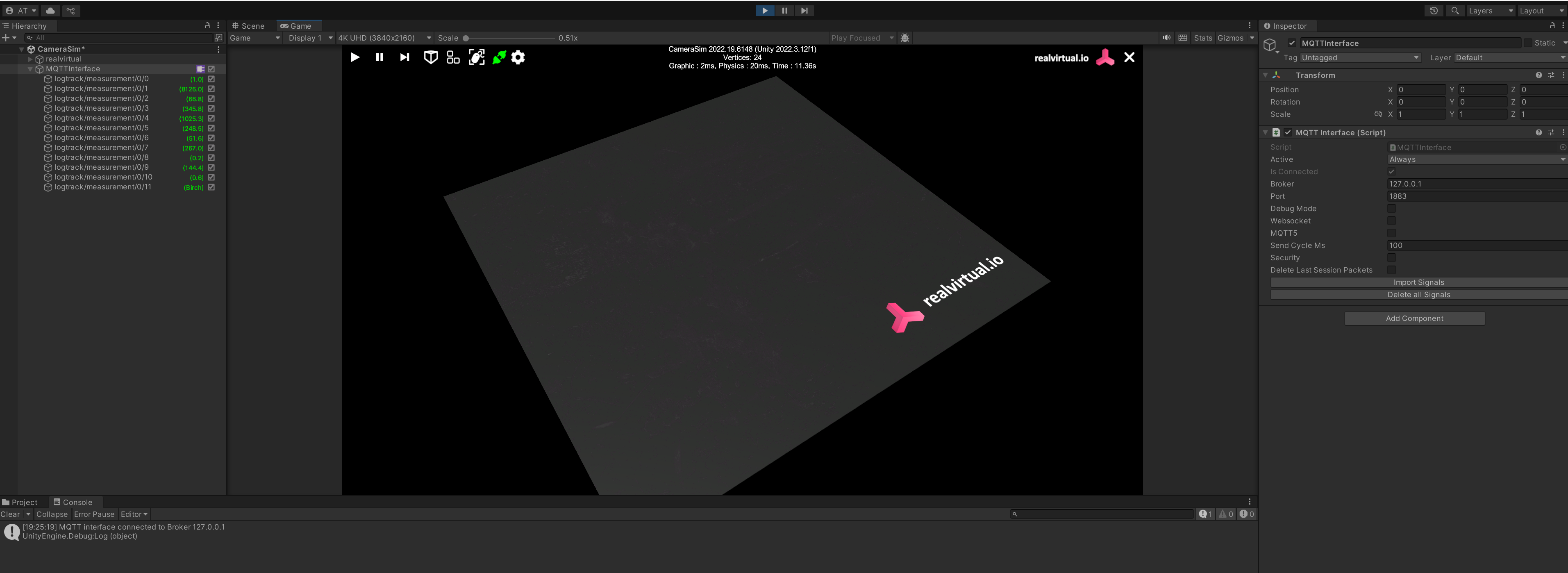
Also, I do not have problem when using the realvirtual MQTT connection with a local broker for example 127.0.0.1 and port 1883
test.mosquitto.org
Error

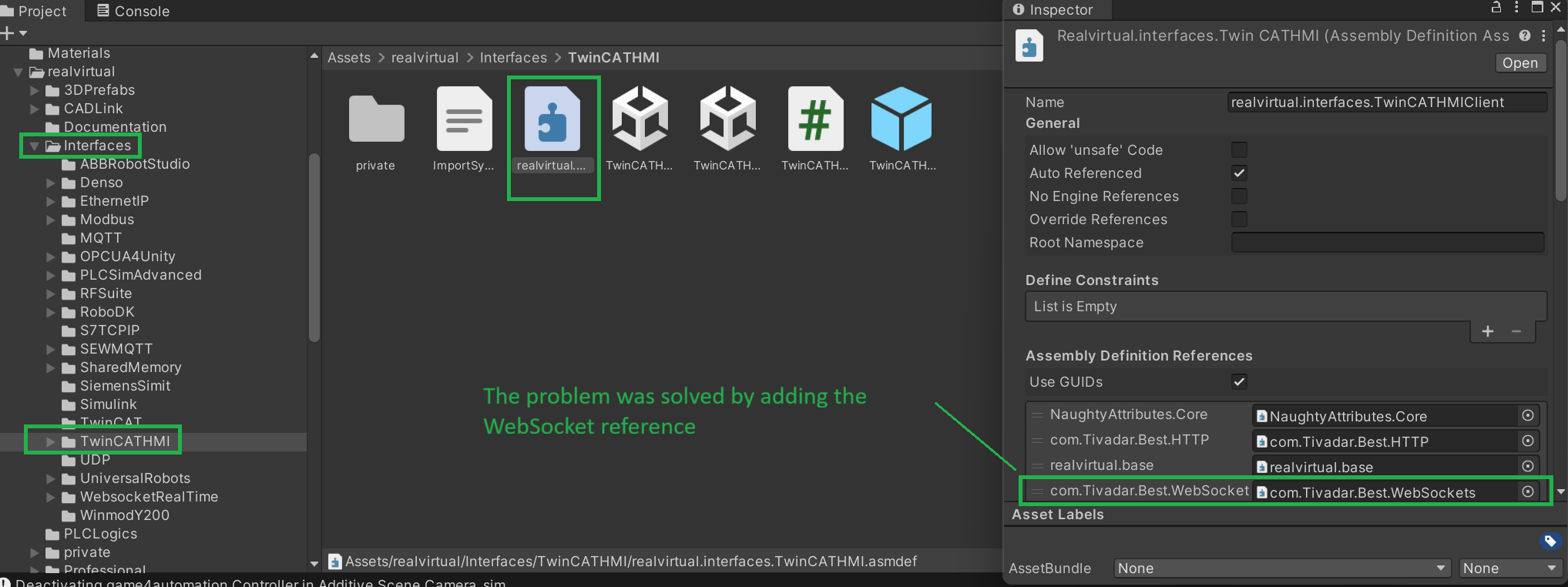
The issue has been resolved!
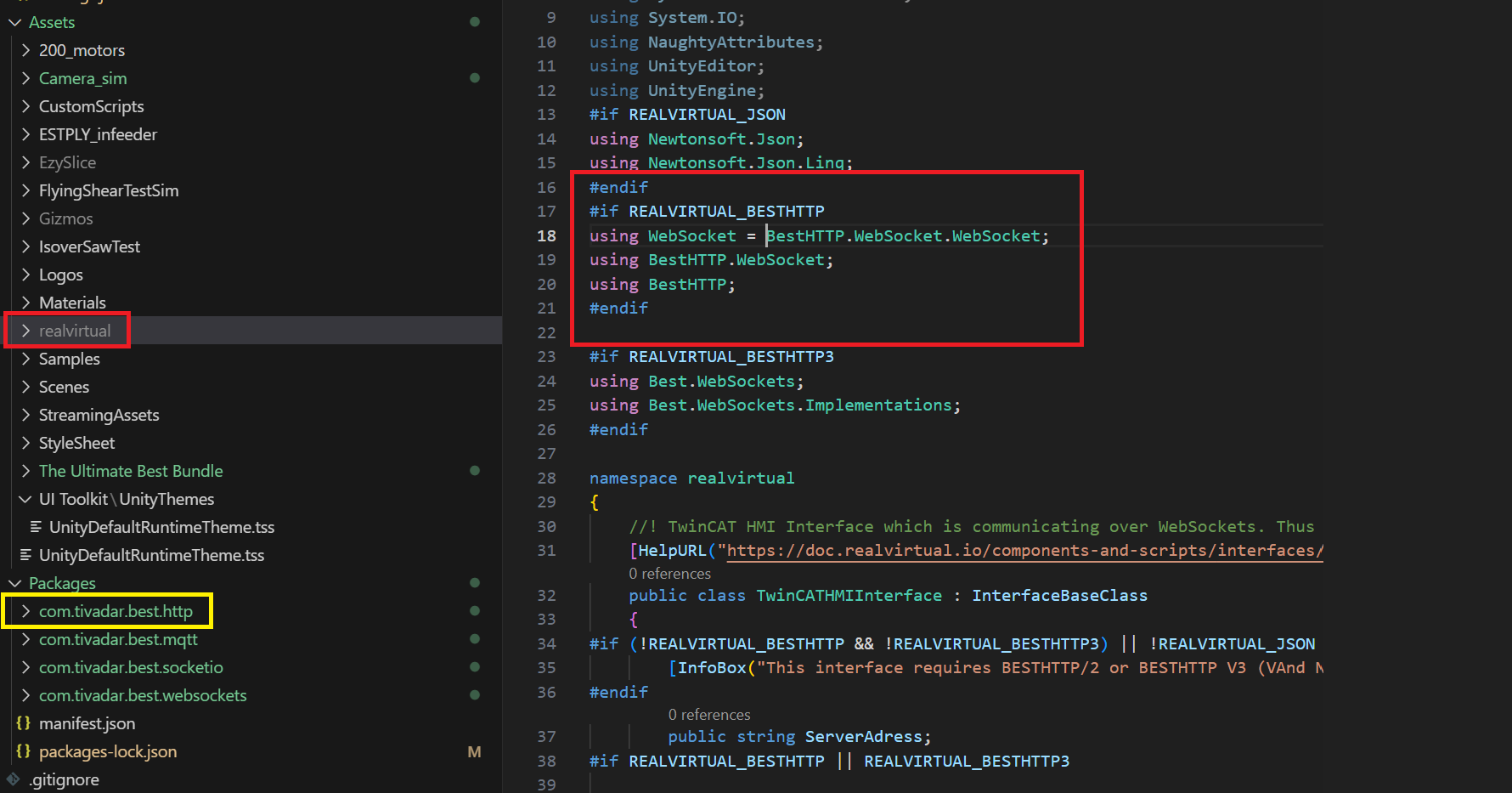
The problem isn't the library or the project. The issue is that your realvirtual.interfaces.TwinCATHMI is missing the com.Tivadar.Best.WebSockets reference. This should probably be added in the next update or added to the realvirtual documentation because the com.Tivadar.Best.HTTP reference exists, but WebSockets is missing.
This is confusing because I'm using the MQTT interface and not TwinCATHM.
But anyway, I'm glad the problem is resolved!
Hi,
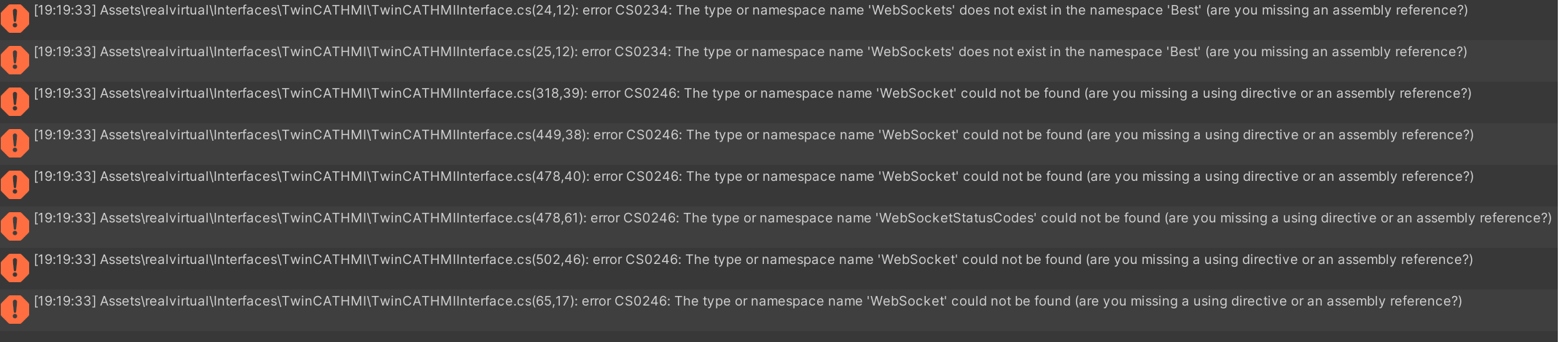
I have a similar problem. After I purchased 'The Ultimate Best Bundle', Unity can't compile.
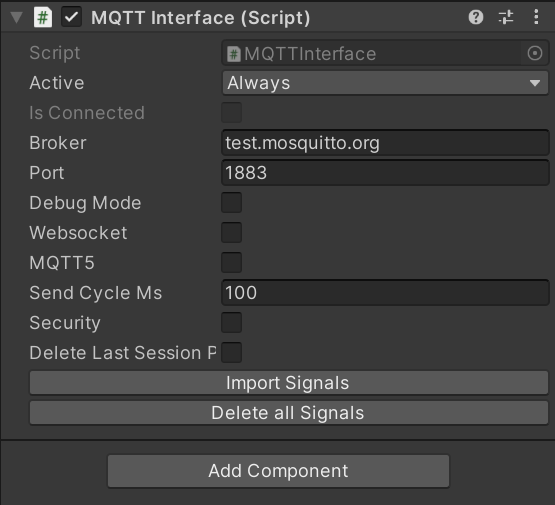
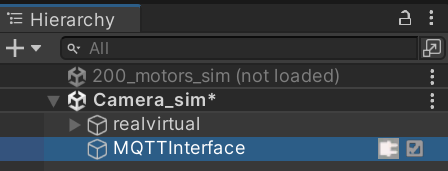
My project contains only the realvirtual and MQTTInterface
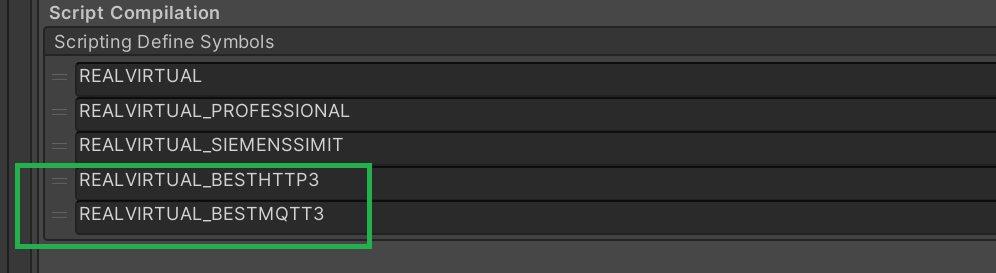
Best HTTP V3, Best MQTT V3 and Best WebSockets V3.
These are imported using the Unity Package Manager.
I also checked Package directory, and all the scripts are present.
Error comes from TwinCATHMIInterface.cs for some reason it cannot find the Best.WebSockets
Customer support service by UserEcho

For all those who are having issues with Best HTTP and the HiveMQ cloud broker:
The problem is that the generated path exceeds 260 characters. Unity only supports path up to 260 characters.
You can find the solution here:
https://bestdocshub.pages.dev/MQTT/#documentation-sections