Antwort

Hi, thanks a lot for sharing. Very cool.
Two questions:
- how did you connected to Codesys (OPCUA?)
- is the inverse kinematics calculated by Codesys?
Cheers
Thomas

Hello Thomas,I want to control my 6 axises robot with Unity,I tried Final IK、Bio IK、IK Constructor but it seems not good,I serched Interact it's too expensive for me。Do you know any other way to do?
Thank you Thomas,I am using RoboDK to animate My Robot Model in
Unity,but I can't control Robot in Unity and 40 Students learning needs 40 RoboDK licenses,I want to use a plugin in Unity can move rotate like in your Interact video。Or will you develop plugin like this in future?

if just teaching robot programming basics , can try this
https://www.hyundai-robotics.com/english/customer/customer4_view.html?no=94
https://www.hyundai-robotics.com/english/include/downloaddoc.html?docid=253
codesys kinimatik is not open source and program planer for linear movment is not clear .. but can try codesys example with codesys win 64 softmotion runtime, it limit for 2working hour, then need restarting.
or can implement code from github in unity
Hello Murdemon,Thank you for providing such videos。It seems need code,but I don't know about C# or any else code,I use playmaker plugin to develop。I am thinking a robot plugin that I just move or rotate the endpoint,6 axises auto IK their rotation after I setup the limit,but I don't find such plugin。
3.mp4
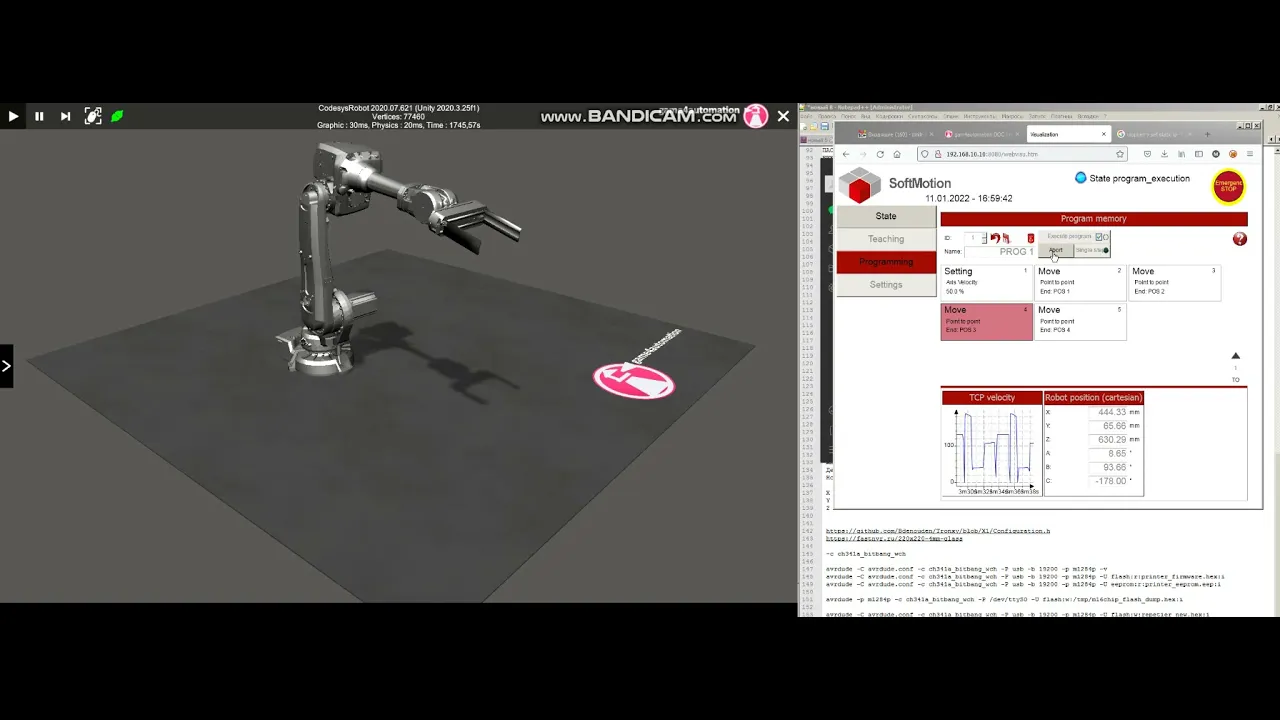
Here is example with codesys with forted code from github, all kinematics is open-source
https://cloud.mail.ru/public/Vtia/rKNetzYVN
I have written IK for industrial robots. Works perfectly!
Sorry, we are developing the program for commercial purposes and cannot share the source code.
- connected by Modbus TCP. Unity as Slave with 6 float registers for Axis angels
- yes inverse kinematics calculated by codesys, raspbery pi3, 10us cycle. Not sure about DH parameters for robot , looks like ABB IRB2600 , on X , Y, Z moving calculation for axies is correct.
https://cloud.mail.ru/public/NX8a/PooBj2PGp - here is unity runtime with robot.
https://cloud.mail.ru/public/VKLn/hyHuLNvhc - it is project archive for codesys 3.5.16, need change ip for modbus master to unity PC address.
Customer support service by UserEcho

You can use RoboDK.