- realvirtual.io Forum
- General Questions
-
 Questions
Questions
0
Answered
Axis (Inverse Kinematics)
I've set all my axis in Blender and I exported the robot over. As the axis are already set I did the Drive and Constraints directly on each sub component of the robot.
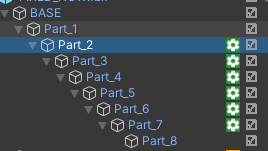
Will this create any problems for me?
Customer support service by UserEcho

This should be OK, it is important that the pivot point of one axis is always the same as the rotation point of the axis.