
0
Answered
Suspend the use of paths built by IK
Hi,
I created the path after building the robot using the IK component.
When I select the loop, it works the way I want it to.
But now my requirement is that I want it to be able to pause the movement after receiving a certain pause signal value and continue the movement after receiving a move signal value.
May I know how can I implement that functionality.
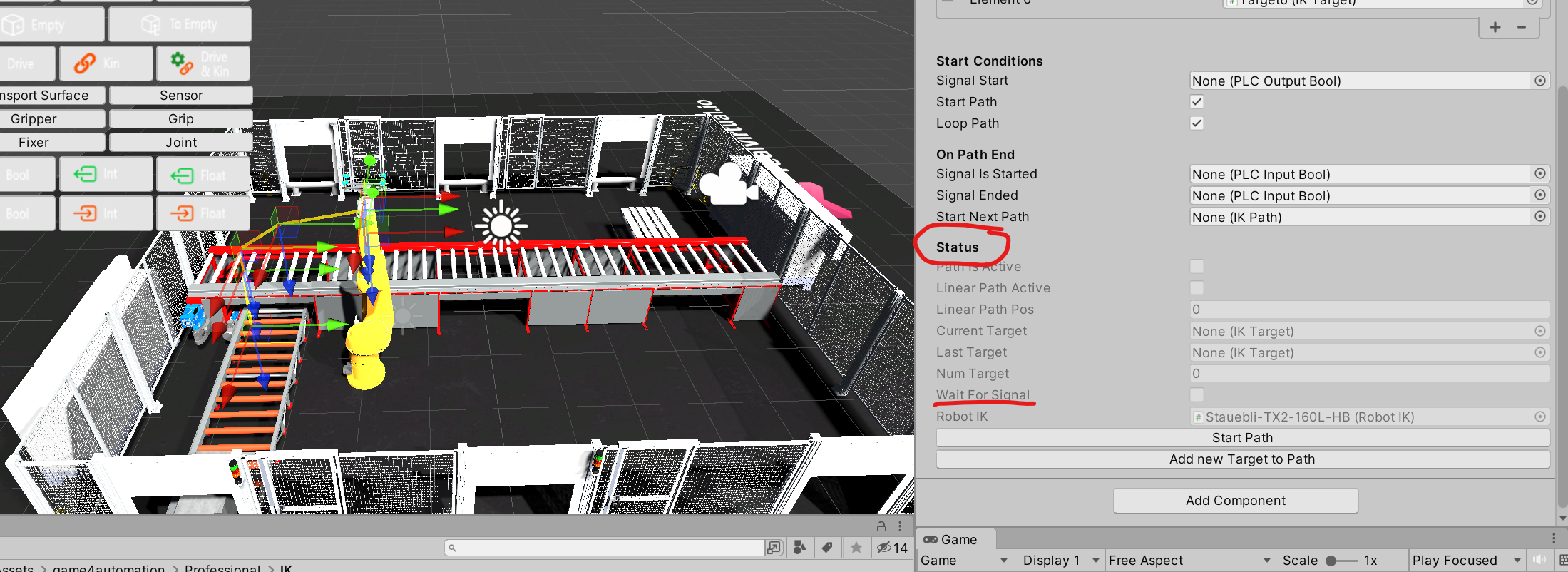
I see that there is a WaitForSignal property in the Script but it is read only, can I use this property? How can I use this property?
Customer support service by UserEcho

You should divide the Path into two sections. You can then utilize SignalEnded, SignalStart, and possibly LogicSteps to achieve your desired outcome. Does this assist you?
Thank you for your reply !
There's something I don't understand about what SignalEnded specifically does. Does this attribute indicate that a signal is output at the end of the path or do I input a signal to end it?
It is going to true as soon as the path is ended so it is an input to a logic. You can use it for example with LogicSteps or in your own C# code.
Thanks for letting me know, I achieved what I wanted!
Your package is amazing!
I currently have a sensor placed on a vertical conveyor belt, and when the cube occupies the sensor it passes that signal to SignalStart to control the robot arm to start moving. After the cube is placed on the horizontal conveyor, I use a loop to bring the arm back to the position where it was gripping the cube on the vertical conveyor to repeat the gripping action. The requirement I want now is to have the robot arm return to grab the cube only when the vertical conveyor is occupied to repeat the gripping action.