Teilen Sie Ihre Erfahrunge und Wünsche mit uns und anderen Usern!
 Error importing the Package
Error importing the Package
I get this error when I import the package to Unity:
Assets/game4automation/private/RuntimeUI/SceneMouseNavigation.cs(801,38): error CS0103: The name 'SpaceNavigator' does not exist in the current context
No Mutex PLCSim Advanced Interface proble
Hello,
we are using the PLCSim Advanced Interface.
We can Import the PLCSignals without any Troubles:
The first time that we start the simulation in Unity everything is working fine (COM OK).
But after we stop the unity editor and try to start again, we get “No Mutex”... so no communication is established between the plc and Unity.
We found out that creating a new PLC Instance and re-importing the signals “fix the error”... but just for the first run. Then we have to repeat the process of creating a new PLC again and again...
Could be some background process blocking the communication? Thank you in advance.
Bug
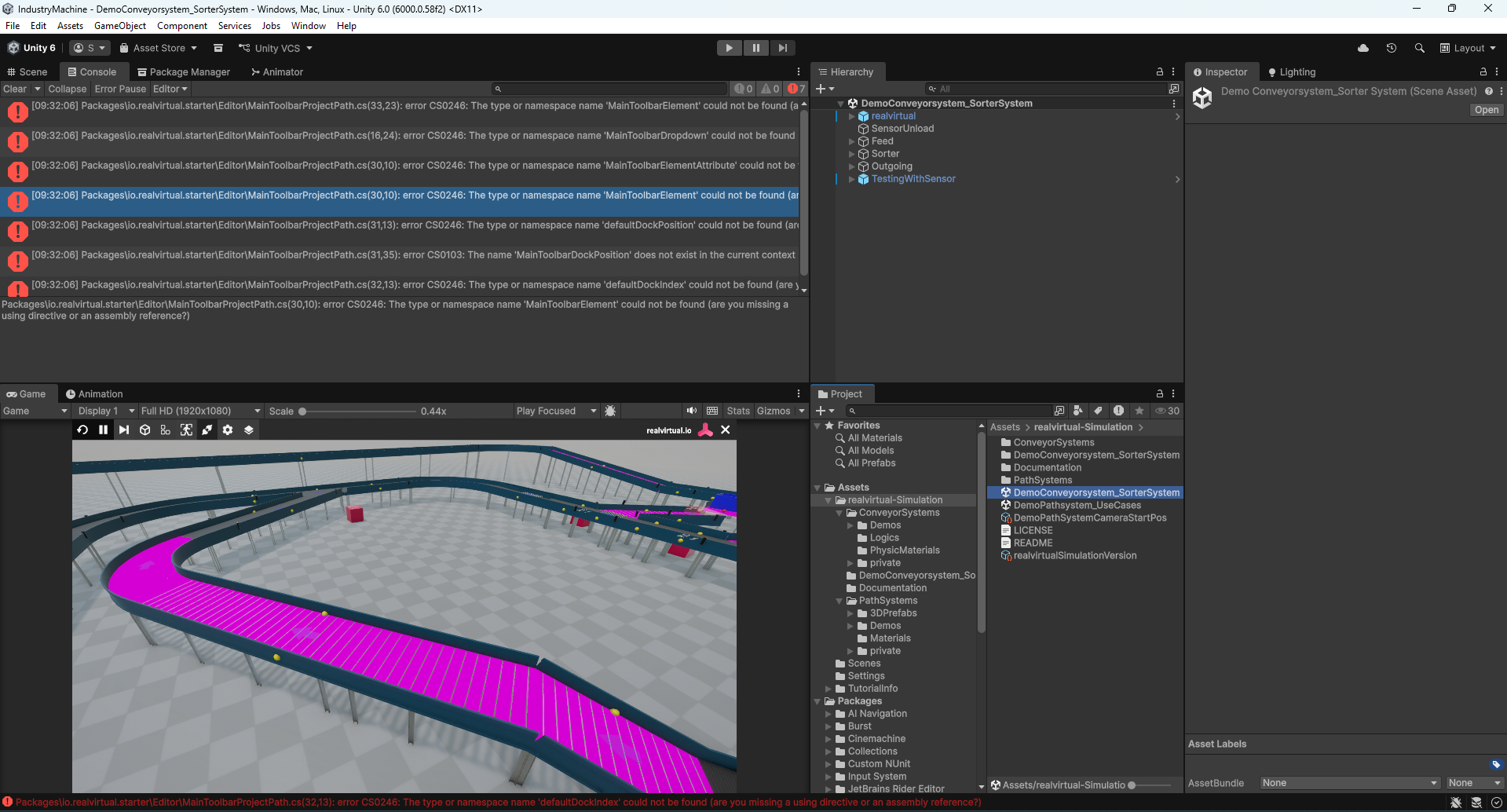
I use Unity6000.0.58f version and I imported Realvirtual Digital Twin Starter 6.3
And I got these errors

Hi sandong0313,
thanks for the report. These compile errors come from a Unity / realvirtual version mismatch: the realvirtual Digital Twin Starter 6.3 is built for a newer Unity 6000 LTS than 6000.0.58f, so the scripts do not compile on your Editor.
Two options:
1) Switch your project to the Unity 6000 LTS version that Starter 6.3 targets and re-import the package.
2) Or stay on Unity 6000.0 and use the matching realvirtual 6.0.x Starter release instead of 6.3.
Installation guide: https://doc.realvirtual.io/
To point you to the exact compatible build, could you confirm your Unity version (Editor > About)?
Best regards

 TRIAL
TRIAL

Hi, after making a build for the windows platform I see a big inscription trail verison, I have purchased the pro version, what's going on, the matter is urgent!
Downloaded version mismatch
Hello,
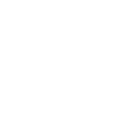
I selected version 6.3.3-9052 for download, but upon importing the downloaded file locally, the actual version turned out to be 6.3.3-9028.
Similarly, when attempting to download version 6.0.12-8862, the file I received was 6.0.12-8592.
I have verified this behavior through multiple tests, and the results were consistent each time; other users have also reported this issue.
I look forward to receiving a reasonable explanation from the official team.

RealVirtual I.O Digital Twin Professional version 6 vs 6.3
Dear,
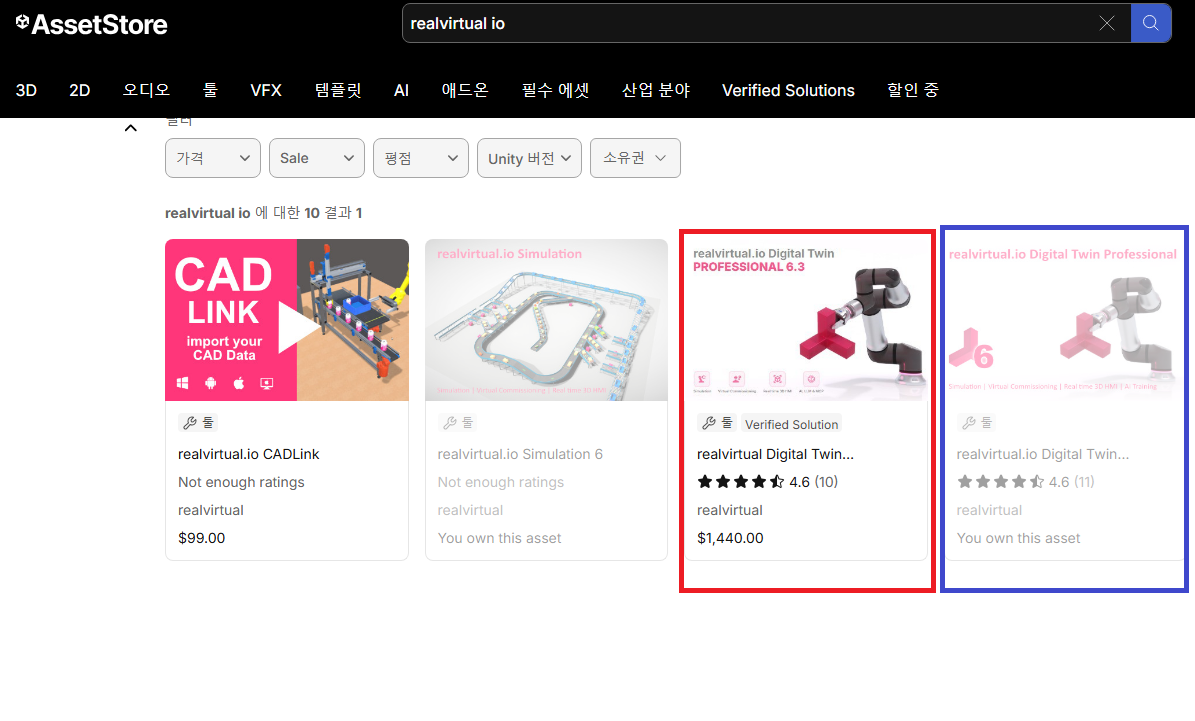
I purchased and am currently using RealVirtual I.O Digital Twin Professional version 6.
Recently, when I tried to update my Unity project to version 6.3,
I discovered that RealVirtual I.O Digital Twin Professional version 6.3 must be purchased separately.
I have two questions.
1) Do users who purchased RealVirtual I.O Digital Twin Professional 6.0 have to pay to purchase version 6.3 again?
(Is there no policy for upgrade costs rather than new purchases?)
2) Could you please tell me the key feature differences between RealVirtual I.O Digital Twin Professional 6.0 and 6.3?
Thanks.
Best regards,
Seokhyun Lee
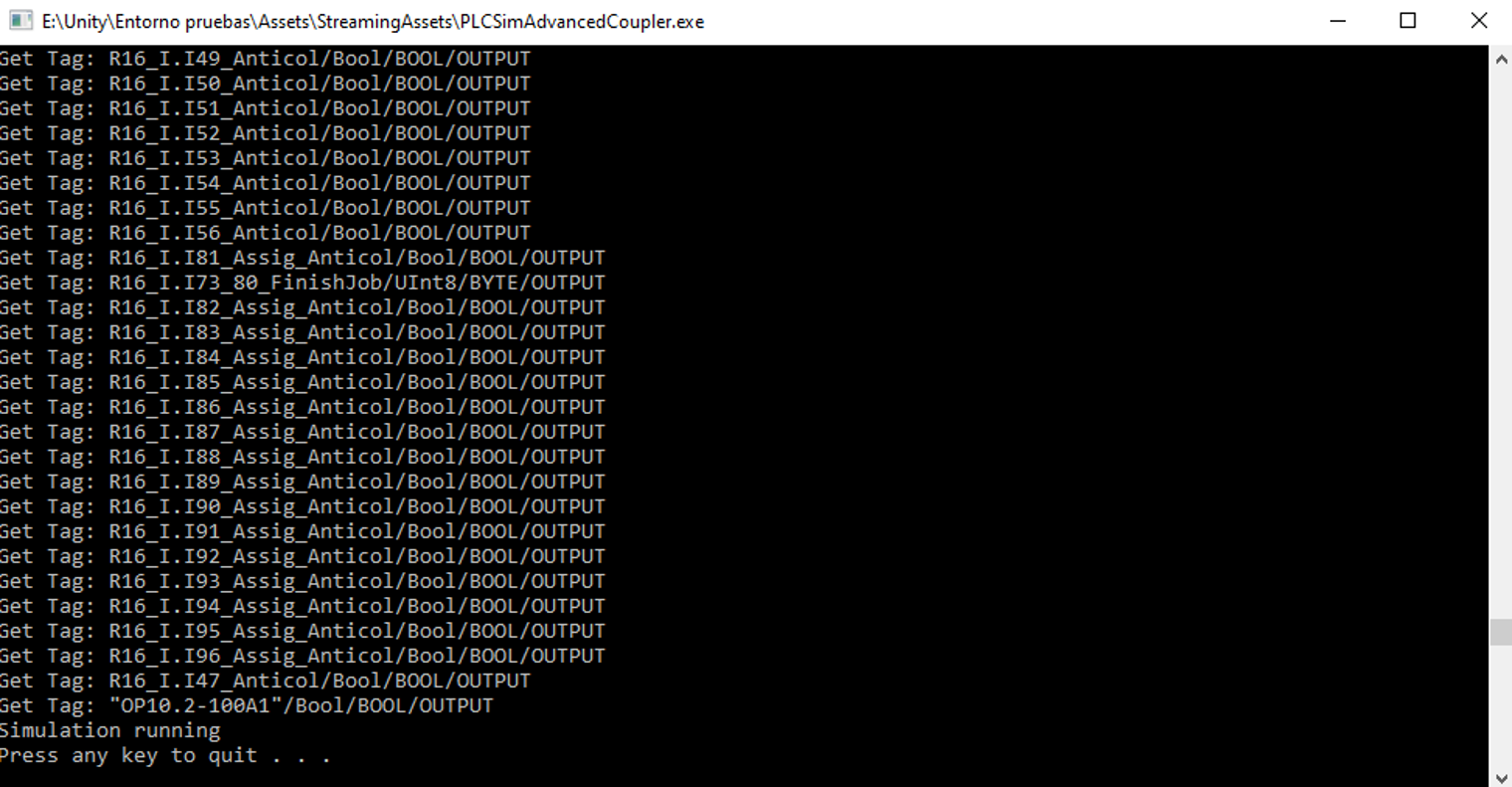
 PLCSimAdvancedCoupler.exe
PLCSimAdvancedCoupler.exe
Hi, when I try to run PLCsimAdvance and configure it, the same error appears as on SS and, the PLCSimAdvancedCoupler.exe download page does not exist.

Please kindly help out. my digital twin starter 6.3 is getting stuck when played. I cant zoom, i can/t change view. the robot does not pick the object off the belt. i just installed Unity. so pretty new

Modbus client support
Hi RV.IO-Team,
I’m currently testing Modbus communication between a Siemens S7-1514 (MB_SERVER) and realvirtual.io.
The TCP connection works and the client connects successfully, but the ModbusInterface script never populates the internal register arrays (e.g. outputregisters). Because of that the signals never receive values.
In the documentation I saw the note:
“Currently realvirtual.io can only be used as a Modbus master. Client support will be added in one of the next releases.”
Does this mean the polling/reading functionality is not fully implemented yet, or is there a recommended setup for reading holding registers from a PLC?
I would like to use Modbus for simulating valves and sensors in a digital twin, so knowing the intended workflow would help a lot.
Best regards
Andreas

6.3 version problem with S7 TCPIP
Hi all!
I am using the latest reavirtual. However, I am having problems with S7 TCPIP because the component displays "waiting to connect" and other error messages, and communication with S7-1200/1500 does not work, although it works with version 6.0.3. What could be the problem and what could be the solution? Thank you in advance for your hel
Customer support service by UserEcho
