
Robot IK Path (Target 0) Program - Not reachable
Hello. Realvirtual team.
I created a Robot IK Path (Target 0) while learning Robot IK following the realvirtual professional tutorial,
but I have a question because IK cannot reach the Target 0.
I used the "ABB IRB4400" Robot model and performed the following tasks.
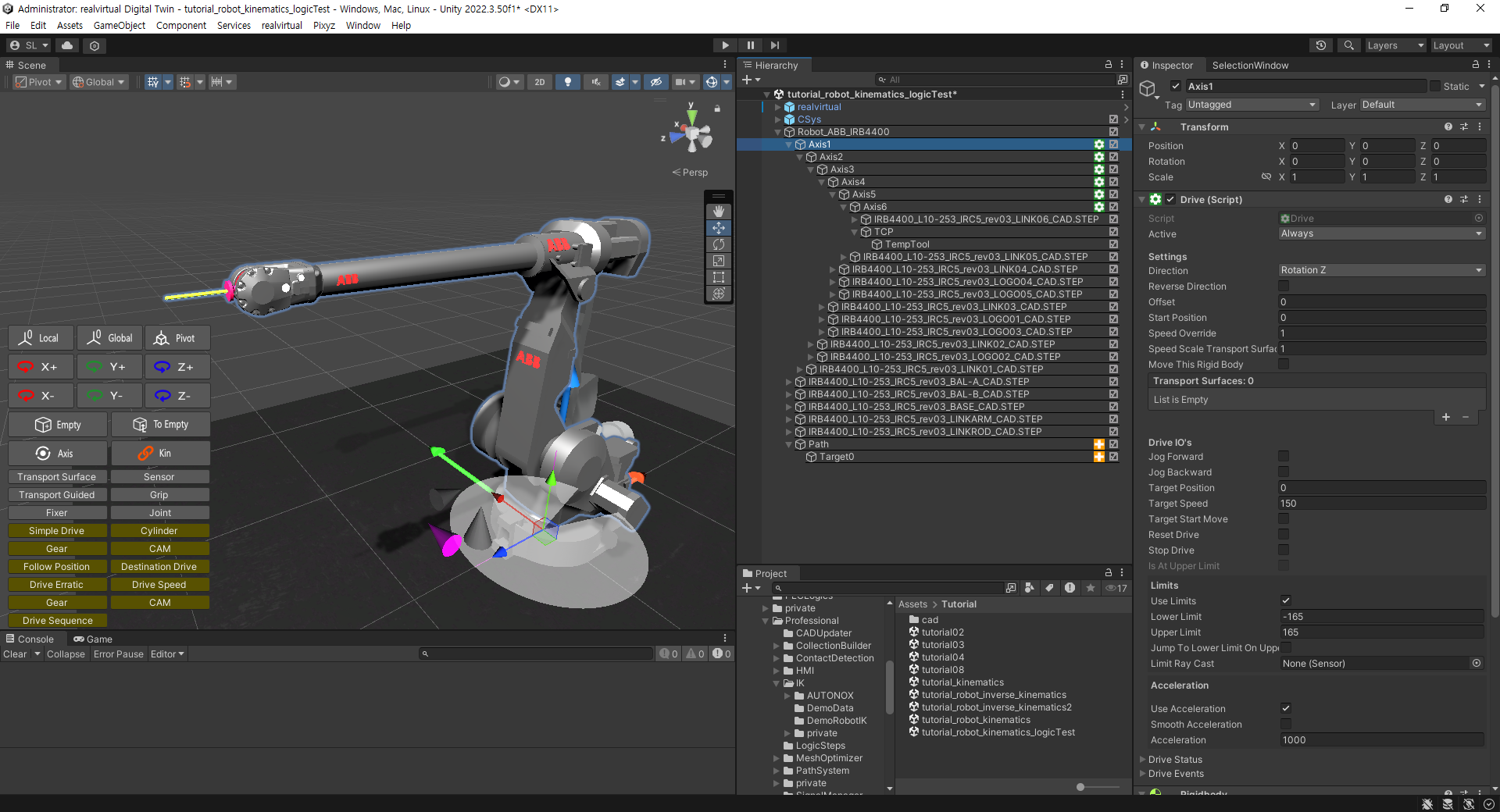
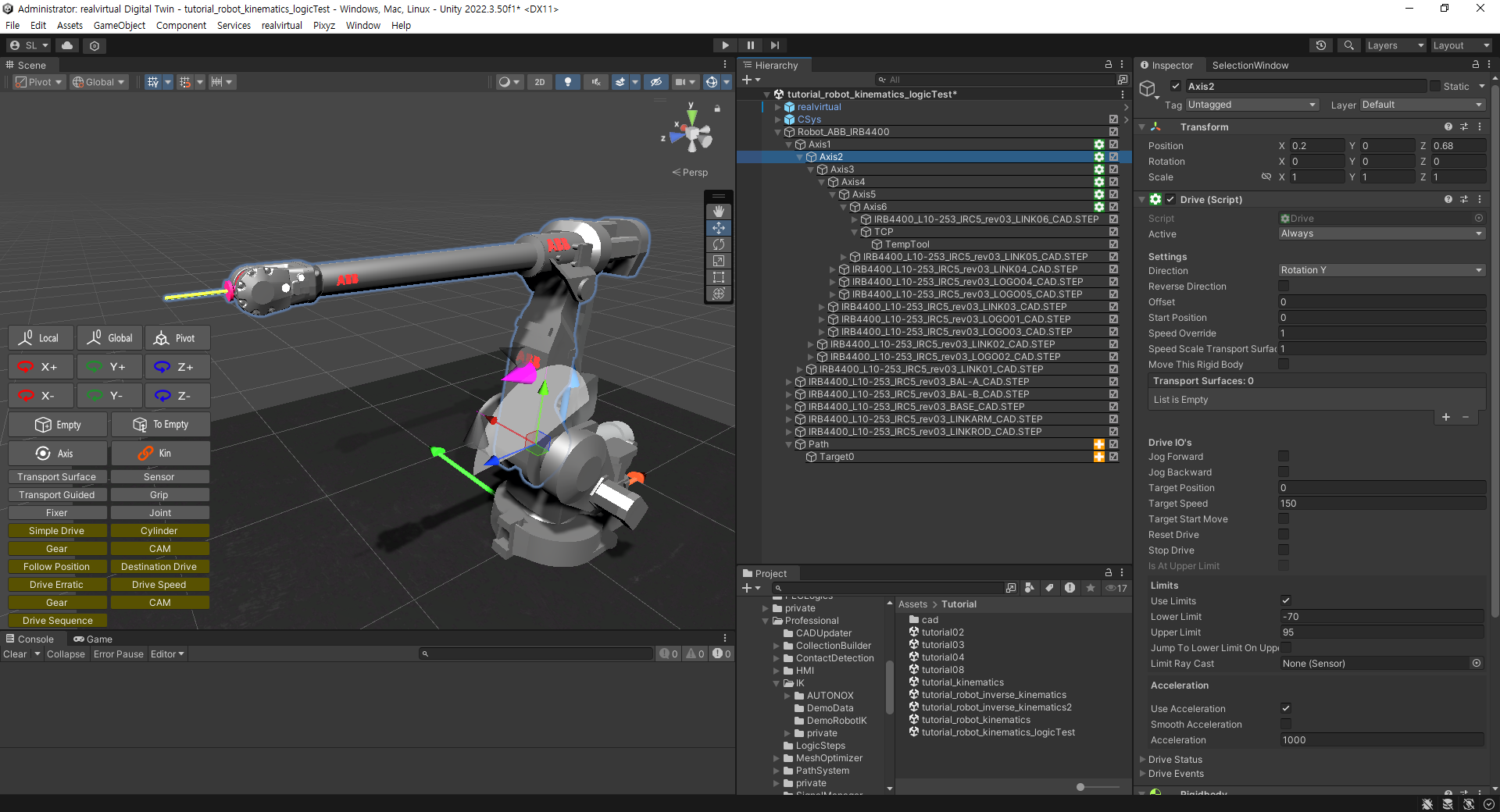
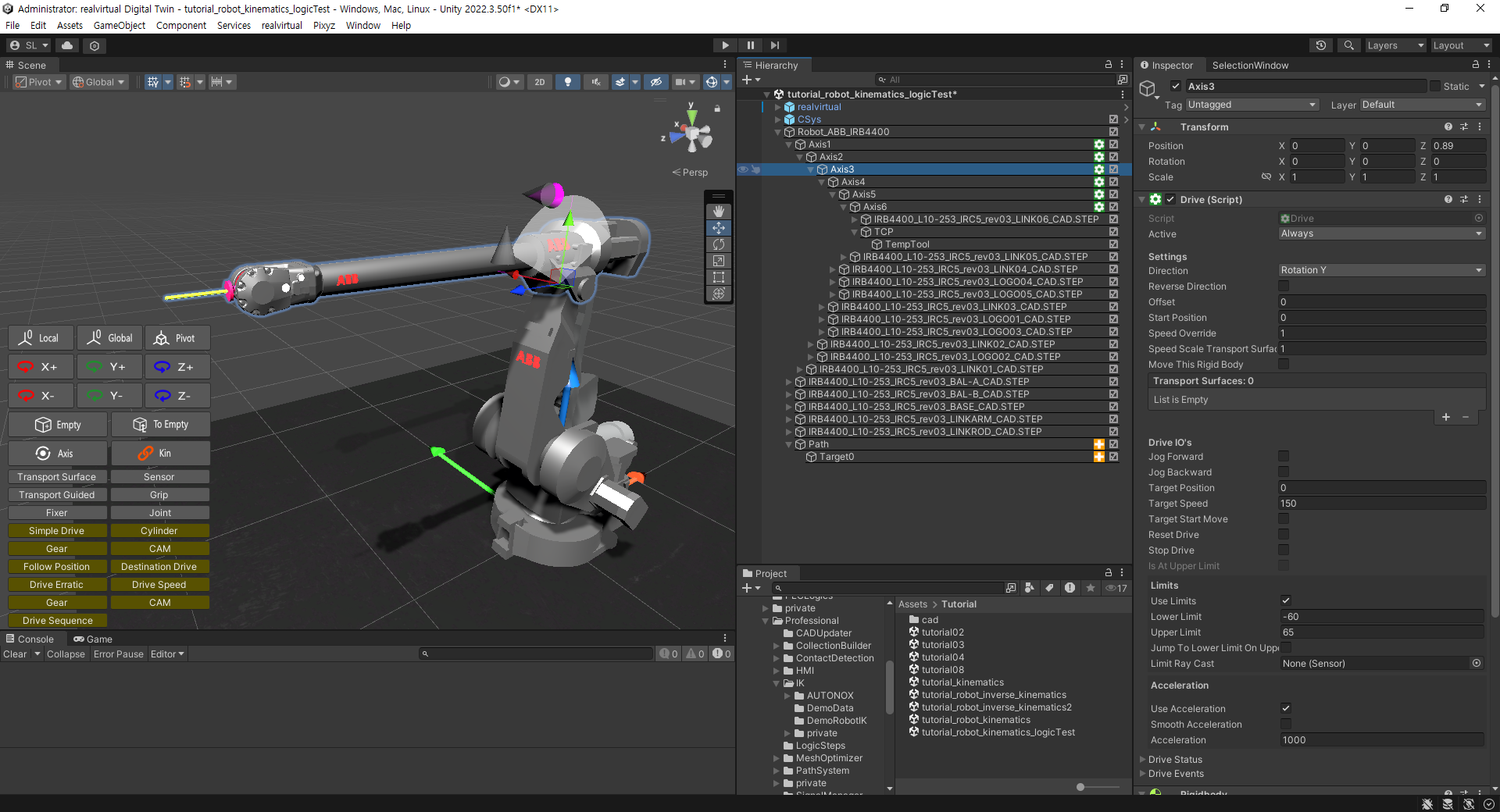
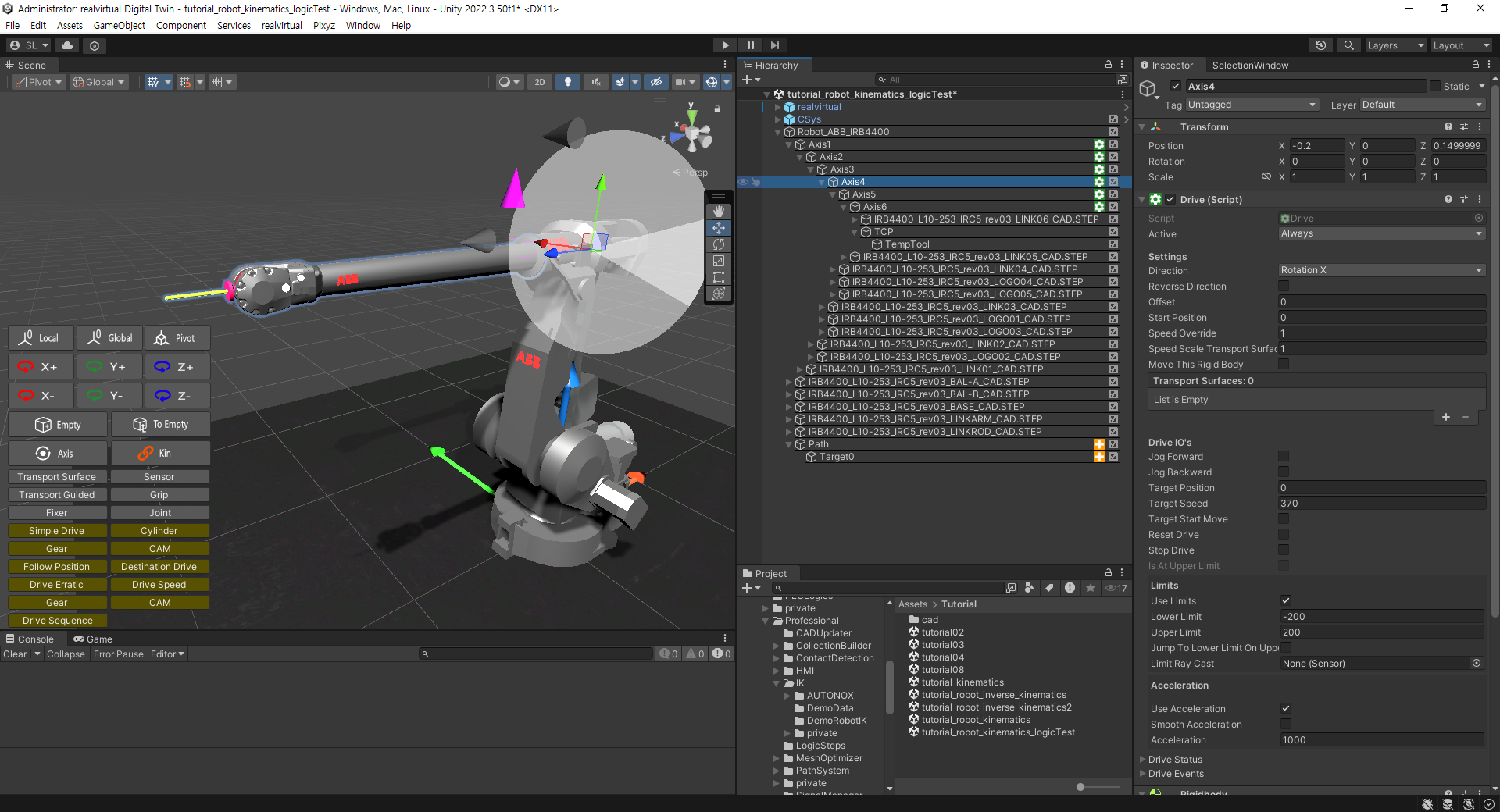
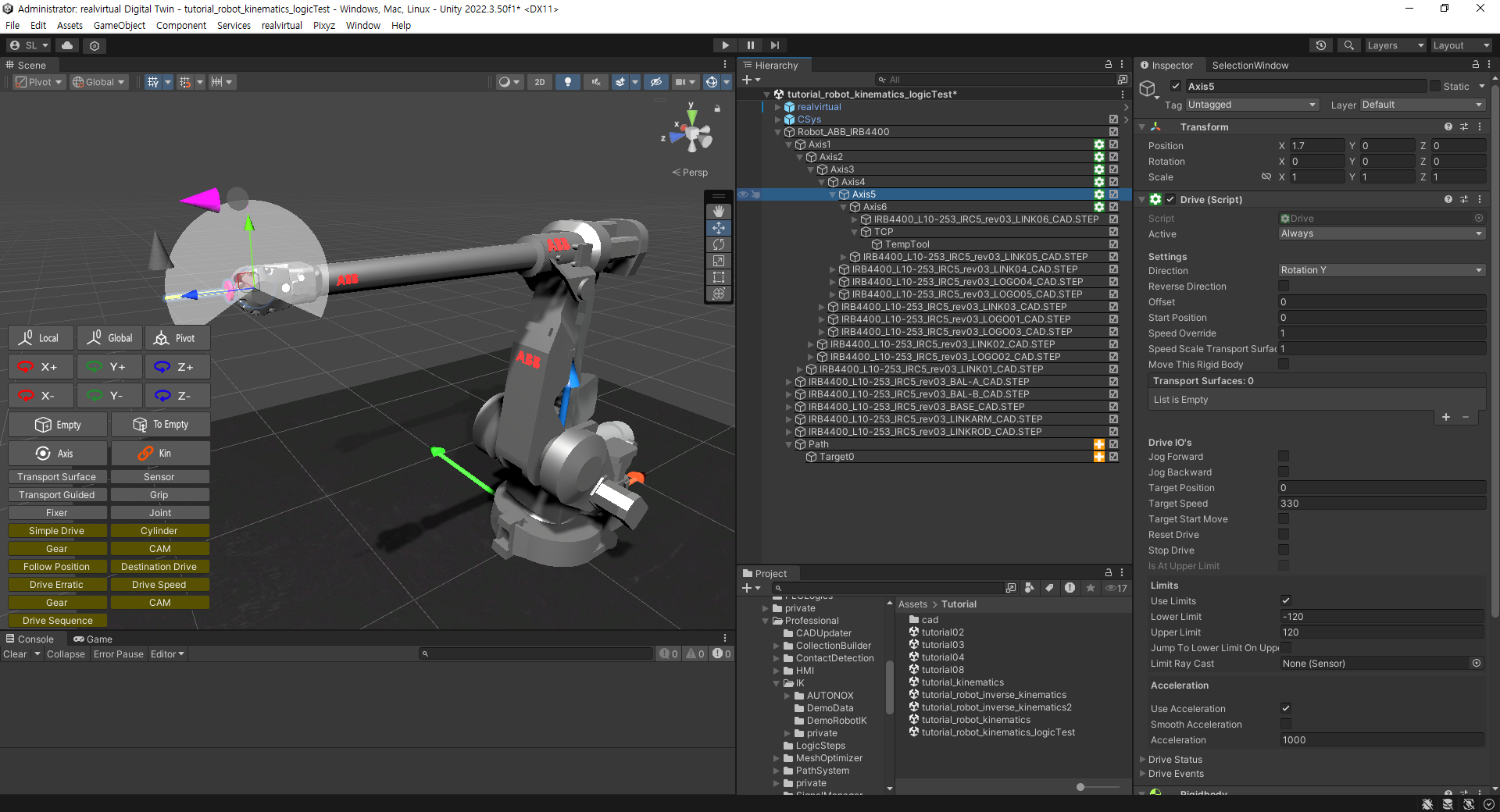
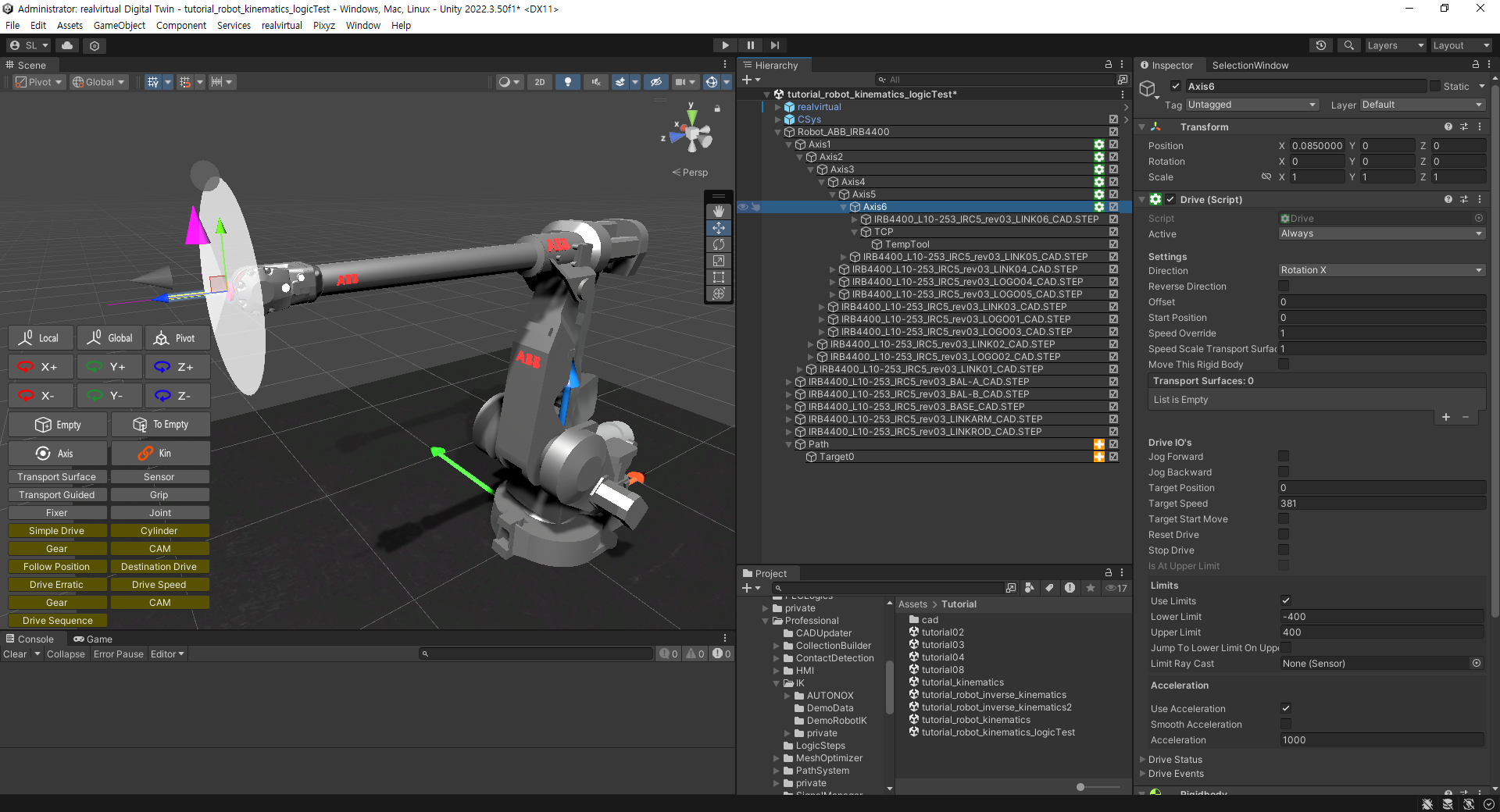
1) Robot 6-axis configuration and Drive settings
2) Robot TCP configuration
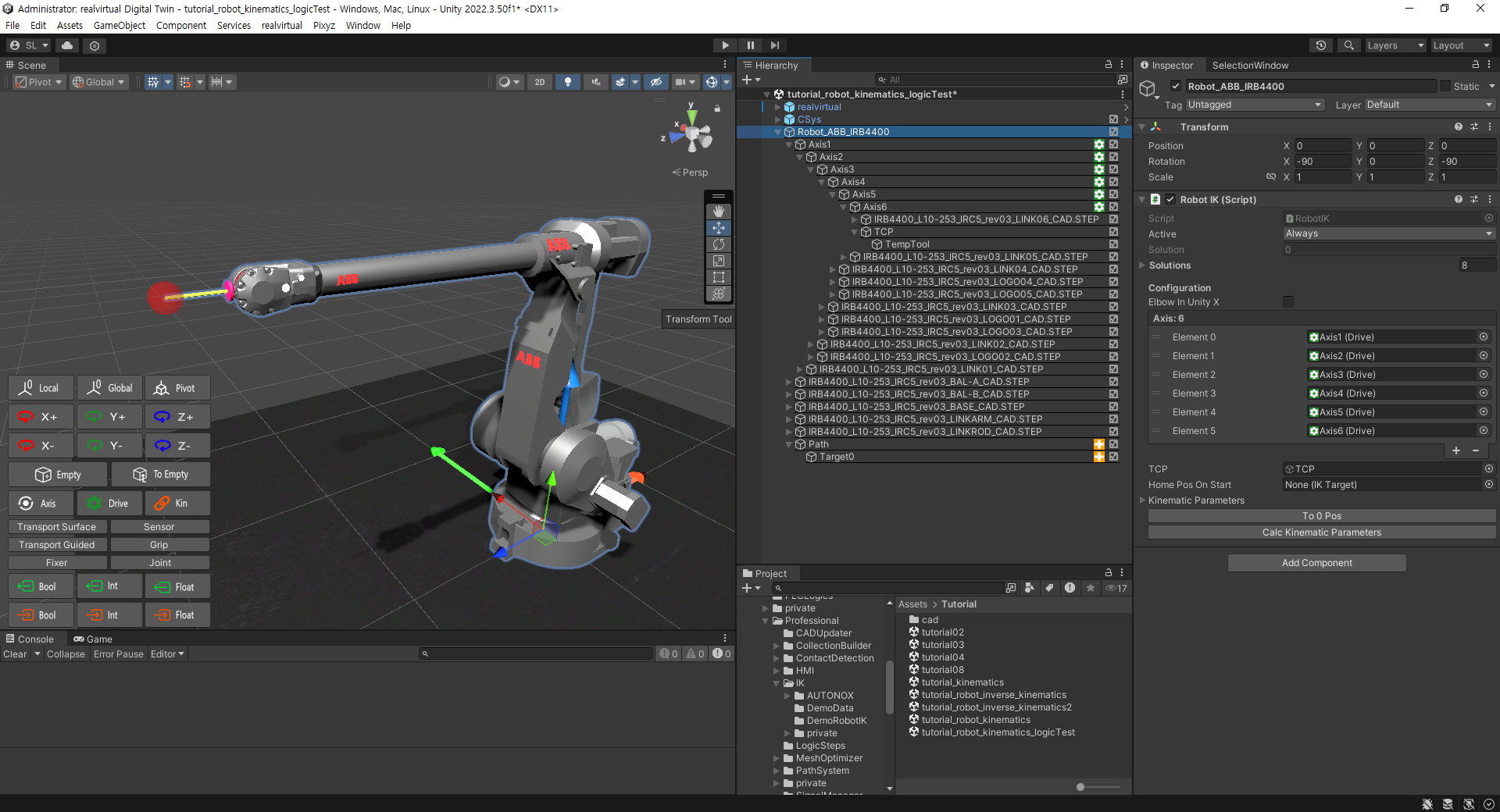
3) Add Robot IK component and then 6-axis and TCP settings
4) Path creation and then IK Path component
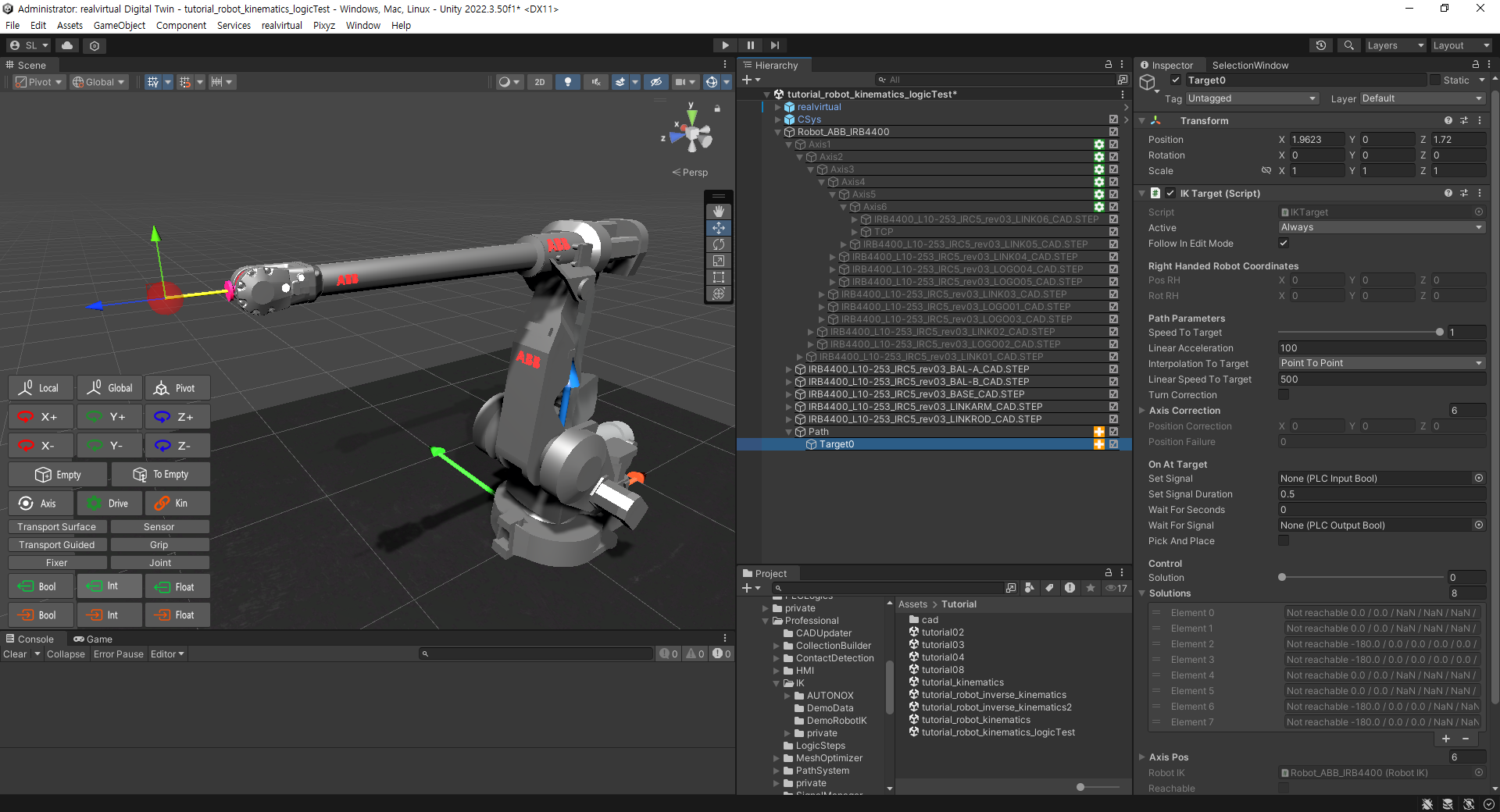
→ When I tried Add new Target, it said it cannot be reached. (It is clearly an area that can be reached.)
→ I also tried moving the Target here and there, but the robot does not follow at all.
Can you guide me on where I made a mistake and caused this situation?
Thanks.
Best regards,
Seokhyun Lee
※ Problem Situation (Capture)
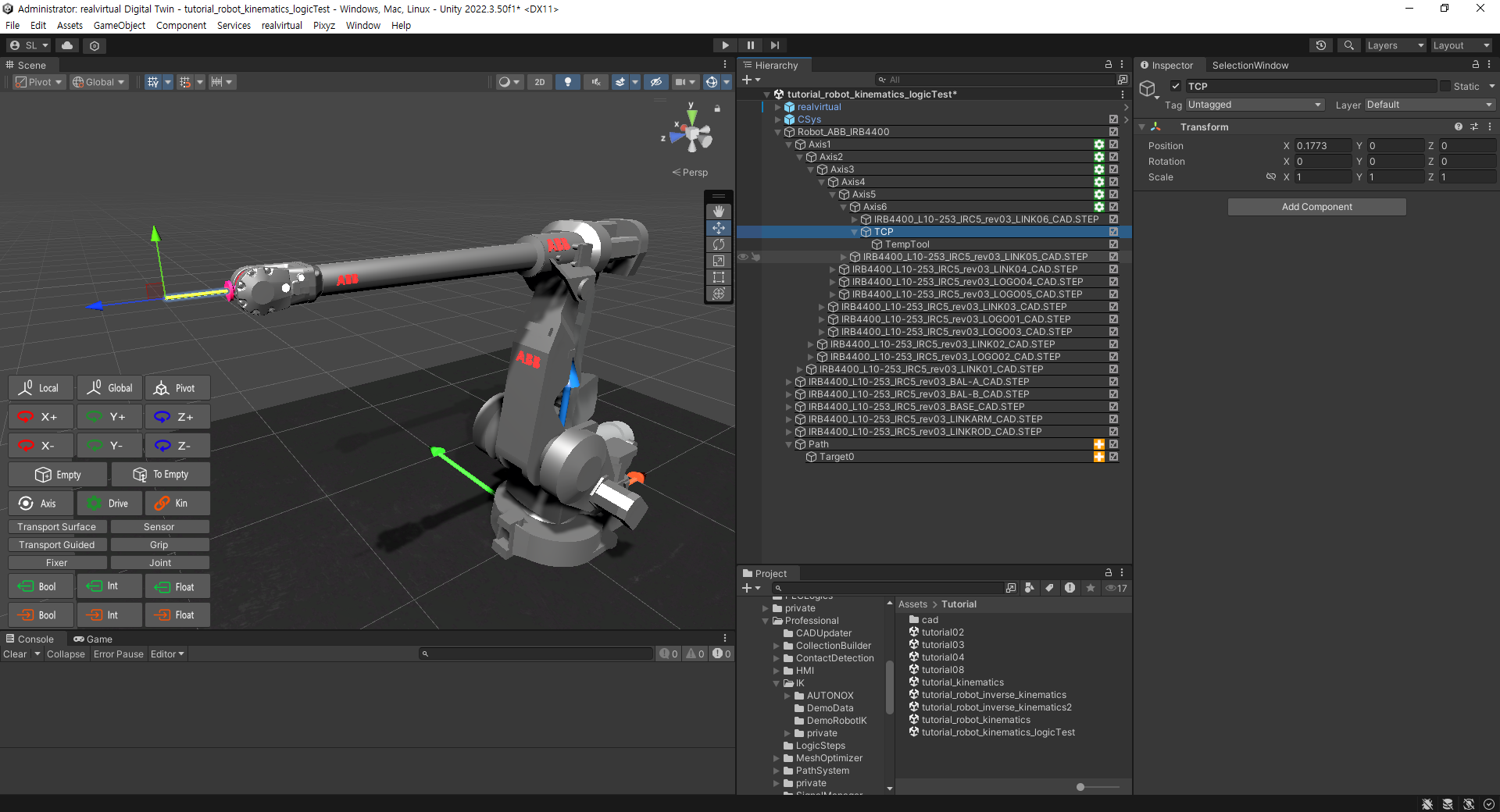
※ Robot Setting (Capture)
Customer support service by UserEcho

Normally this issue occurs if your axis coordinate systems are not set as they should.
Did you used this empty prefab which helps you for doing this (orientation of the coordinate systems of the 1st axis and no relative rotation in the sub axis)?
Assets/realvirtual/Professional/IK/EmptyRobotKinematic.prefab
Thank you for your reply.
1)
I applied the axis coordinate system using the empty prefab you mentioned. (Assets/realvirtual/Professional/IK/EmptyRobotKinematic.prefab)
And then, it works normally. :)
2)
I have an additional question.
IK Path generation works differently in the two cases below.
I would like to ask what settings are responsible for the difference.
(In Case 1, the IK works with the TCP facing forward (front of the robot), and in Case 2, the IK works with the TCP facing downward (bottom of the robot).)
Case 1) ABB Robot (6-axis)
- I fine-tuned the axis positions to match the ABB IRB4400 3D model in the IK empty prefab.
(Assets/realvirtual/Professional/IK/EmptyRobotKinematic.prefab)
- Also, the Z-axis direction of the TCP was set to the front of the robot.
※ Case 1 : Robot Setting
※ Case 1 : IK Path Movement Result
→ IK Path is created with TCP facing forward (front direction of robot).
How should I set it to look down like Case 2?
Case 2) Autonox Robot (6-axis)
- IK example prefab. (Assets/realvirtual/Professional/IK/AUTONOX/Autonox_AT_00005.prefab)
※ Case 2 : Robot Setting
※ Case 2 : IK Path Movement Result
→ IK Path is created with TCP facing down (bottom direction of robot). (Difference from Case 1)
Thanks.
Best regards,
Seokhyun Lee