
0
Completed
Robot IK for 6-axis multi-joint robot
I checked the document that among the 6-axis multi-joint robots, only robots that can align TCP, Axis6, 5, and 4 in a straight line are possible for IK to work.
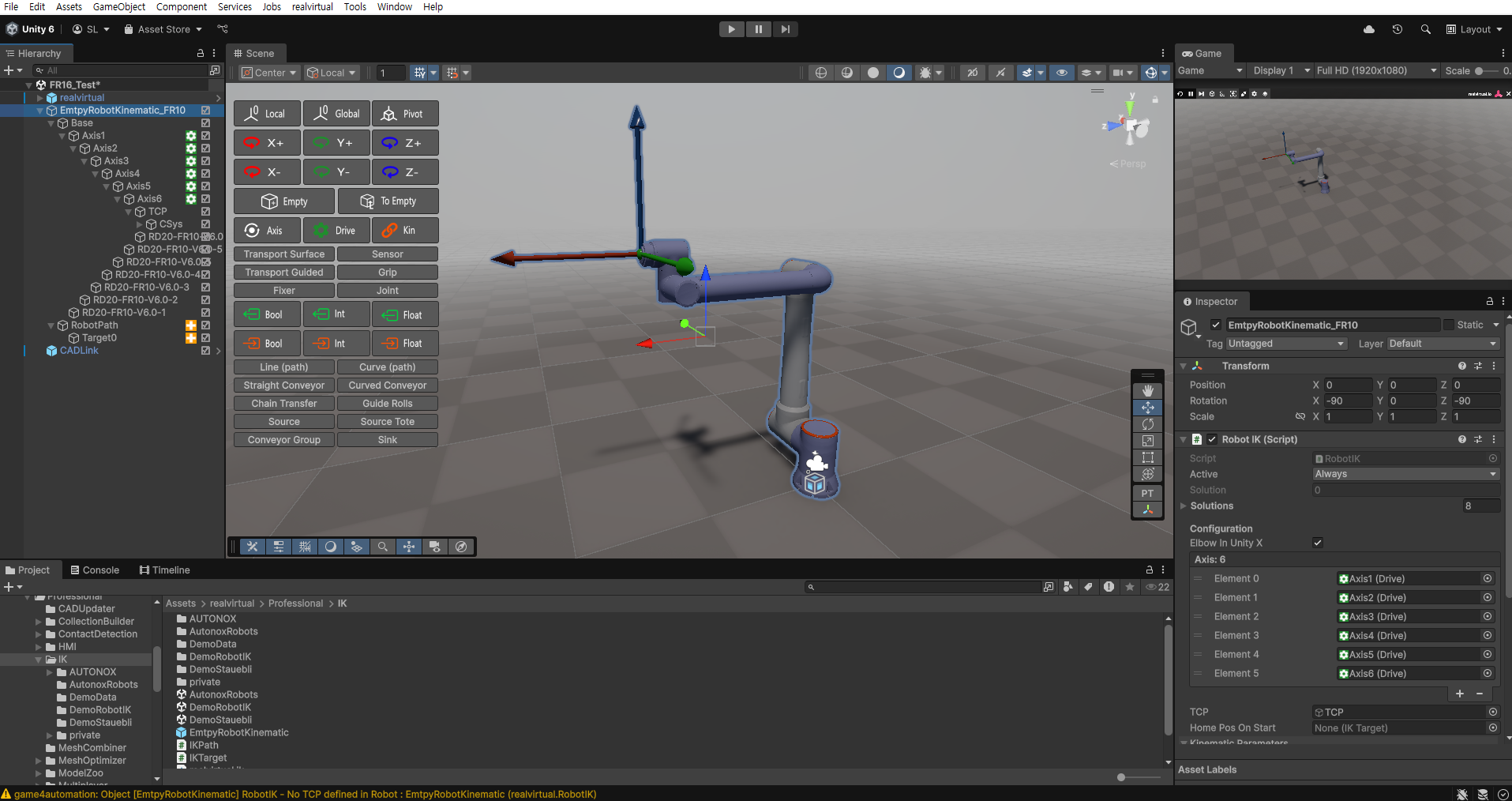
How can I apply IK to a 6-axis multi-joint robot (a robot where Axis6, 5, and 4 are not aligned in a straight line) like the one in the picture below?
Customer support service by UserEcho

Hi, currently this is not working with our IK calculation. It is limit to the robots which align with the doc.
We plan to extend in future but are still not sure if we are able to solve (we are using a special very fast calculated trigoneometrical solver).
Thanks for reply. If so, could you please share if you know of any other Unity Assets that support IK for a 6-axis collaborative robot (a robot where Axis6, 5, and 4 are not aligned in a straight line)? (Paid or free assets are fine.)
I am sorry, for this special type of robot i don't know a solution. All Unity asset store solutions are more gaming focussed and are as far as I know not able to calculate all the possiple solutions for one TCP position and orientation.
We are currently checking if this type would be possible and I expect to have an anwer end of next week.
Thank you for your reply. These days, 6-axis collaborative robots are widely used in industrial sites, so it seems that a solution that can solve the IK of such robots (Axis 6, 5, 4 are not aligned in a straight line) is required when building a digital twin.
For example, UR robots can be said to be representative.
※ UR16e: https://www.universal-robots.com/products/ur16e/
I would appreciate it if you could let me know the results of the feasibility review.