Your comments
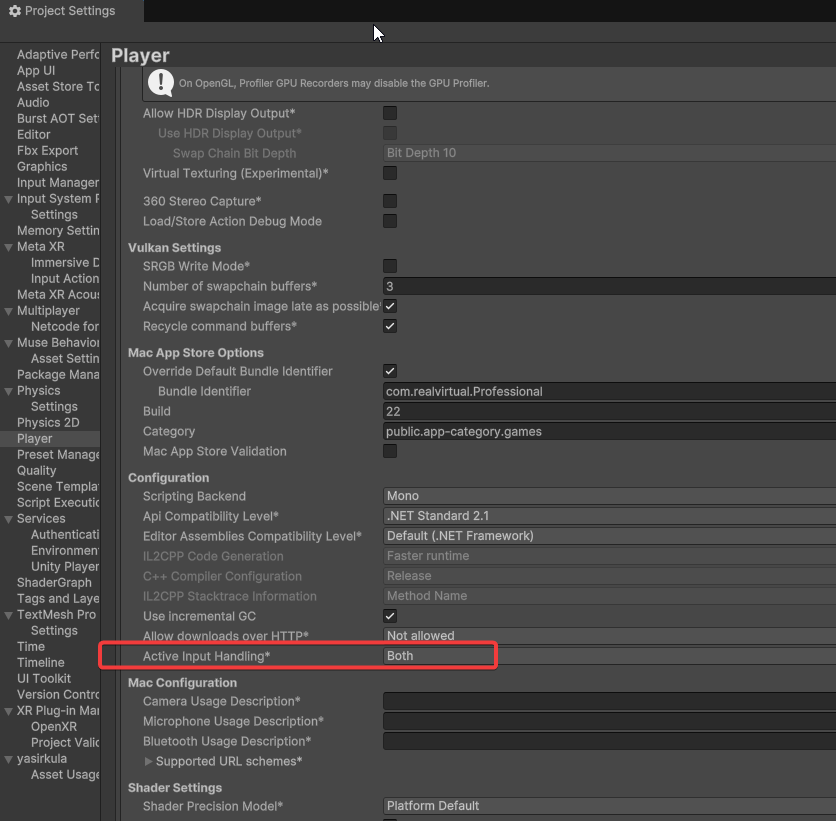
Please set in Project Settings > Player the Active Input Handling to "Both"
Yes it is necessary to have version 6. I did not knew that Unity 6 is not available in China. We will soon put back the old version on the Asset Store.
This utility was introduced in realvirtual.io Professional 6 and is only available in the Professional 6 release. If you’re still on the 2022 Pro version, you won’t see “Combine Meshes (Pro)” in your menus—this feature doesn’t exist in earlier 2022.x builds doc.realvirtual.io. To use it, you’ll need to upgrade your license and project to realvirtual.io 6.
Hi, we checked with our OPCUA demo server and reconnection works as expected. Can you describe a little bit more your setup so that we can try to reproduce the issue.
You are right - thanks a lot for reporting. Will be fixed in next release.
Hi, we are checking and looking for a solution.
Customer support service by UserEcho


maybe the 1st error hindered to set the standard settings. please select in the realvirtual main menu the option Apply standard settings: