Your comments
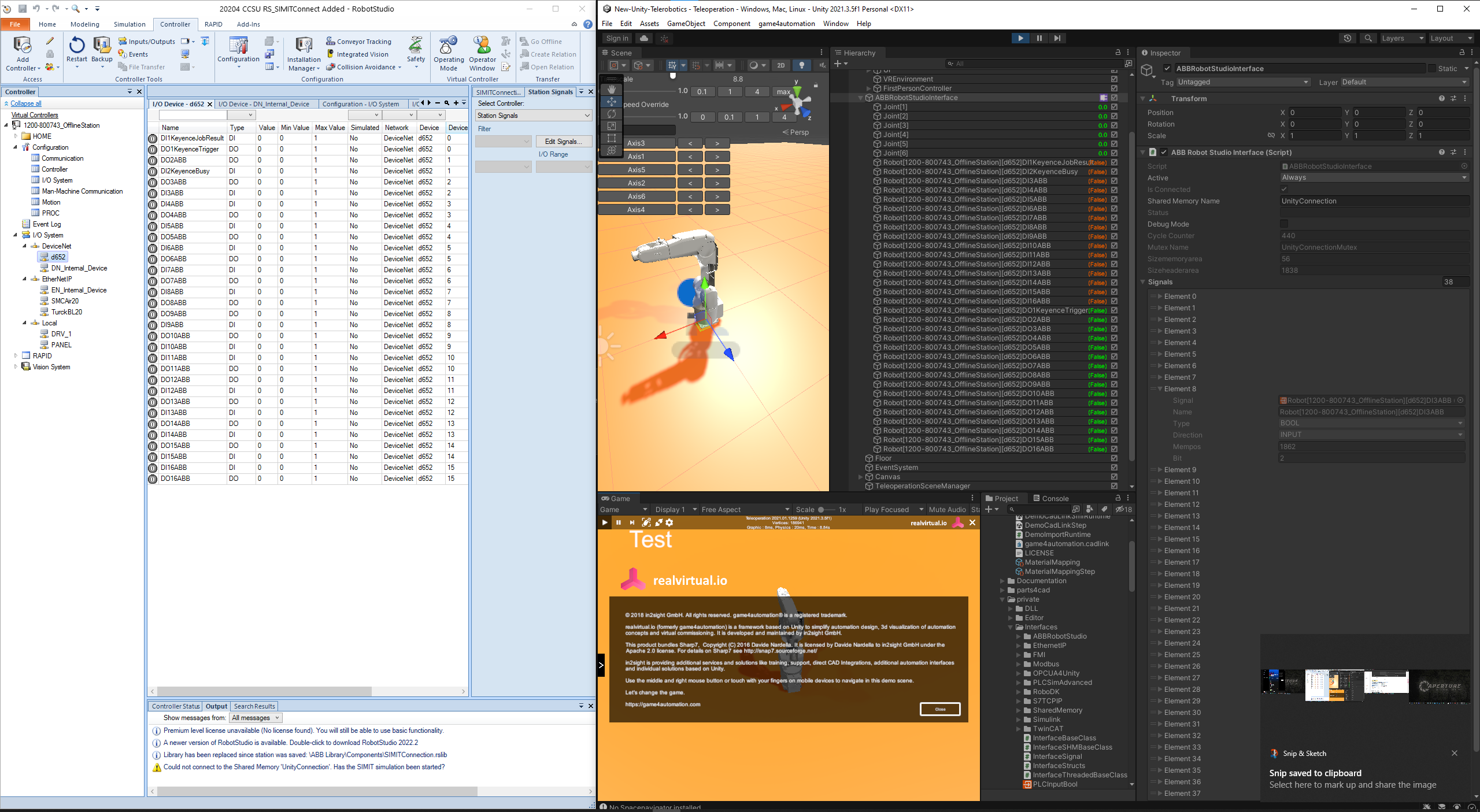
Ok, I think I set up the signals according to the resources you provided. I replicated all of the signals seen in this screenshot within realvirtual. How do I test to see if the connection is working? I tried playtesting unity and starting the simulation in RobotStudio, and the ABB RobotStudio interface in Unity says it's connected to the SIMITConnection module in RobotStudio, but when I change signal values in either program, the value on the other end does not update. Did I miss a step somewhere? My overall goal is to have the robot model in Unity move when the RobotStudio model moves, and hopefully to be able to move the RobotStudio robot by moving the Unity model.
Ok, perfect. How does the process differ for me to use that direct interface instead of SIMIT? I'm very new to all of this.
Thank you. Will this work without SIMIT?
Customer support service by UserEcho

Ok, I look forward to hearing back from you. Thank you for the help.