- realvirtual.io Forum
-
 Ideas
Ideas

0
Completed
It is possible to drop the can in any position?
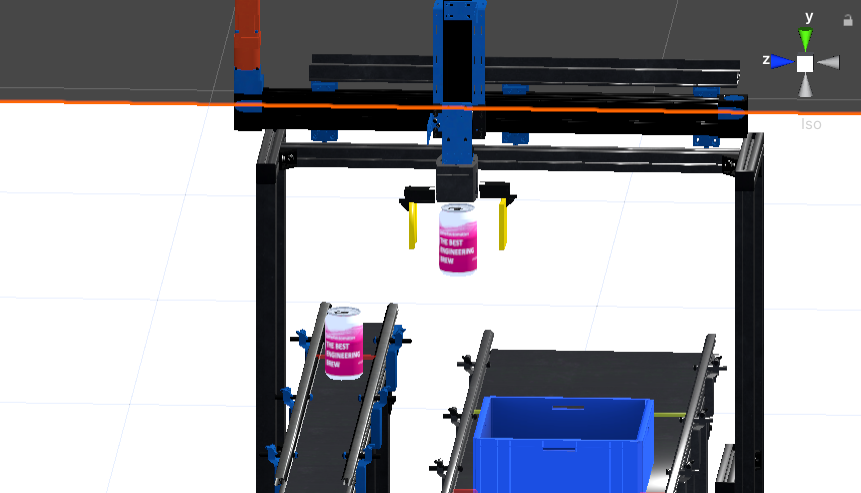
I want a very realistic physics to simulate the robot taking a can and dropping the can when the gripper is opened. It's possible?
Answer

Answer
Under review
You will need to set the Values "PlaceObjects" or the corresponding values to true to loose the can. If you use PickBasedOnCylinder this can be controlled by a connected cylinder. So the Can should fall down whenever you open the Cylinder.
Customer support service by UserEcho

You will need to set the Values "PlaceObjects" or the corresponding values to true to loose the can. If you use PickBasedOnCylinder this can be controlled by a connected cylinder. So the Can should fall down whenever you open the Cylinder.