0
Answered
How to set correct position for roatation kinematic on axis
While trying to setup the demo robot I have found that you must manually place the drive in the dead centre of the axis for the point of rotation although it seems extremely hard and inefficient to have to manually set this and try get right?
Is there any methods or tools to use to get the point of rotation in the dead centre, I will put some photos to try visualise
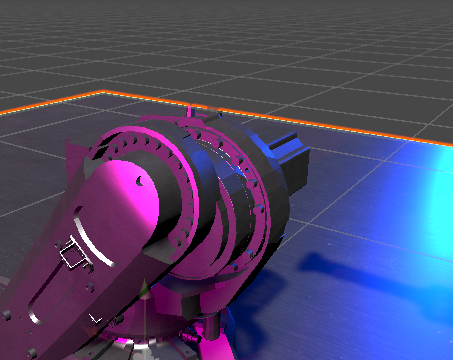
what I mean
Customer support service by UserEcho

Hi,
Unity's mesh-based system offers great performance, but selecting centers can sometimes be tricky. Here are a few solutions to help you overcome this issue:
Tool to adjust and align the pivot points of your objects.