
0
Answered
Inverse Kinematics broken behaviour
Alexander Andreasson 2 years ago
in realvirtual.io Starter and Professional
•
updated by Support 2 years ago •
3
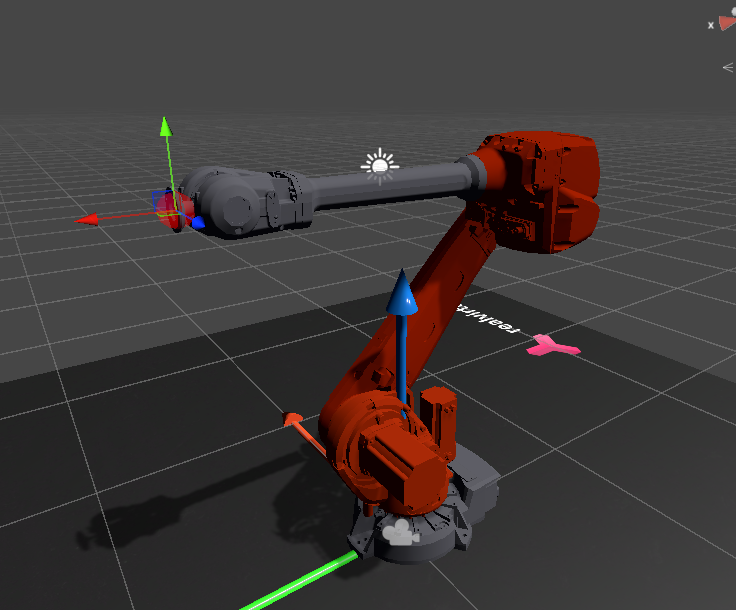
Following the entirety of the the RVIO IK tutorial, the robot is showing incredibly broken behavior. The target is red and if you move it around until the IK responds. It behaves in a really unpredictable manner that makes it very hard to find out the source of the problem.
The 6 axis robot i am trying to use.
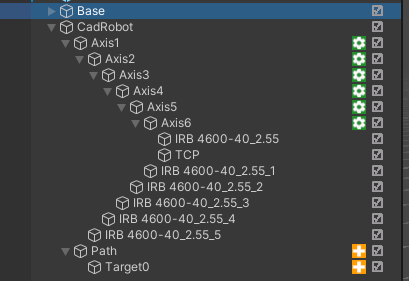
The hirerarchy
The strange behavior
I have tried "remapping" the entire robot from scratch, using a different model that I fine tuned in blender. And also tried messing around with the import coordinates and rotation. Any help is highly appreciated.
Customer support service by UserEcho

I think something is wrong with the orientation of the corrdinate systems. They Best way for having everything well arranged is to use one of the existing working robots. Delete all the meshes out, move the pivots to the new axis positions and move the meshes in. Now use "Calc Kinematic Parameters". Also Elbow Setting needs to be as set to the correct value. By this you have the guarantee that the kinematic is ok. Or there is a Prefab "EmtpyRobotKinematic" which you can use for this.
I had similar problems when I tried the RobotIK for the first time.
You have to do I exactly like in the tutorial video and set up the scene settings to the following:
This was the game changer for me haha