Ihre Kommentare
Hi, i think it is because you are not using 6.0 LTS (you are using Unity 6.1)
- Open Unity Hub.
- In Unity Hub, select Universal 3D under Core templates to use the Universal Render Pipeline (URP) as the basis for your project.
- Set a project name and choose a location for the project folder.
- Ensure Editor version 6000.0.X is selected to use Unity 6 LTS.
- Click Create Project to initialize a new project. This may take some time as Unity sets up the project files.
I checked our doc and it might be missleading there, we changed it to be more precise.
Please check and let us know.
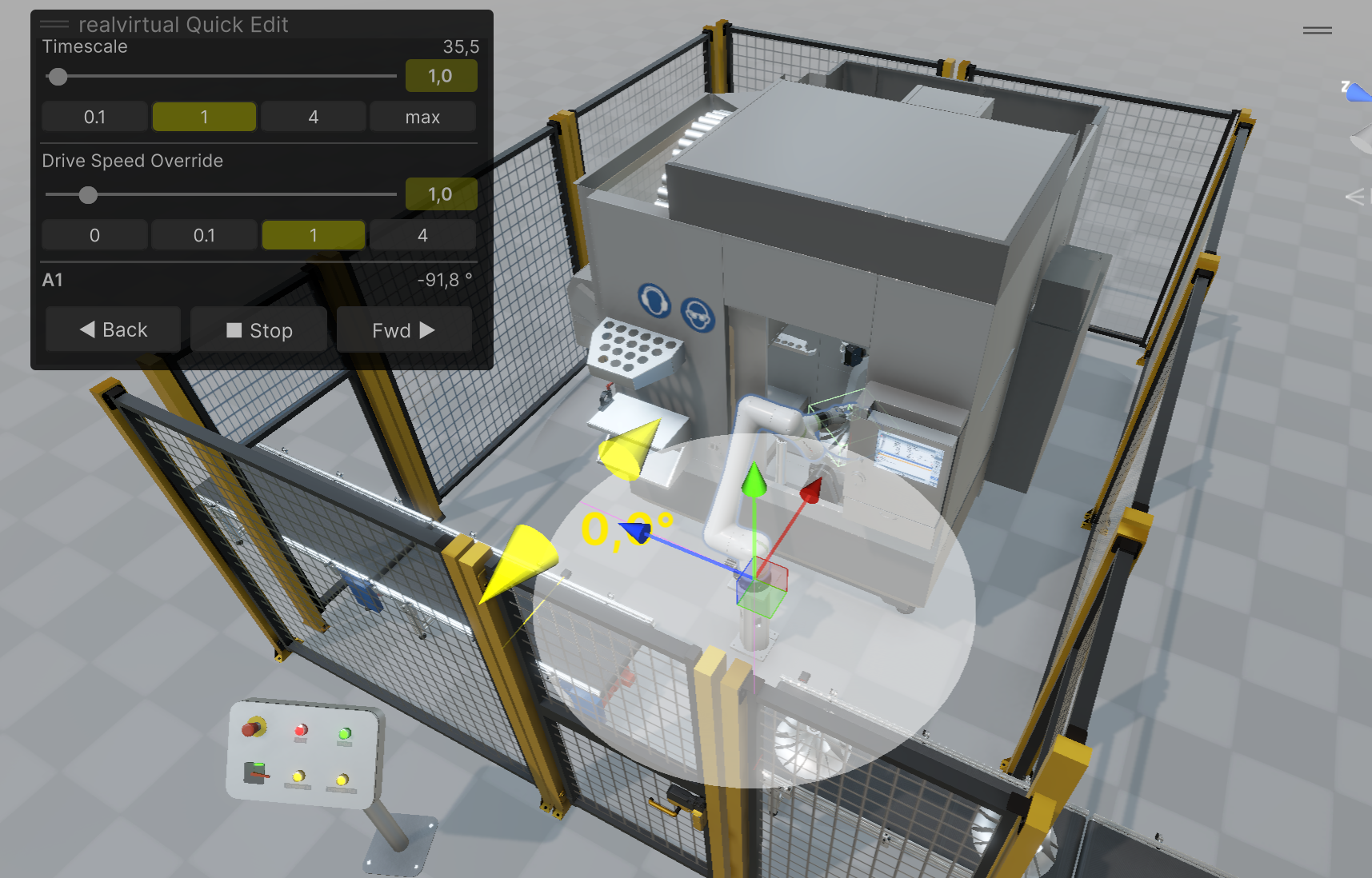
we soon release - this or latest next week a brand new release with a lot of UI enhancements. there it can be always turned off and save its state:
Thanks a lot - there seems to be a bug in our Scene template. We will take care about it in our next release (which will be end of this / beginning of next week).
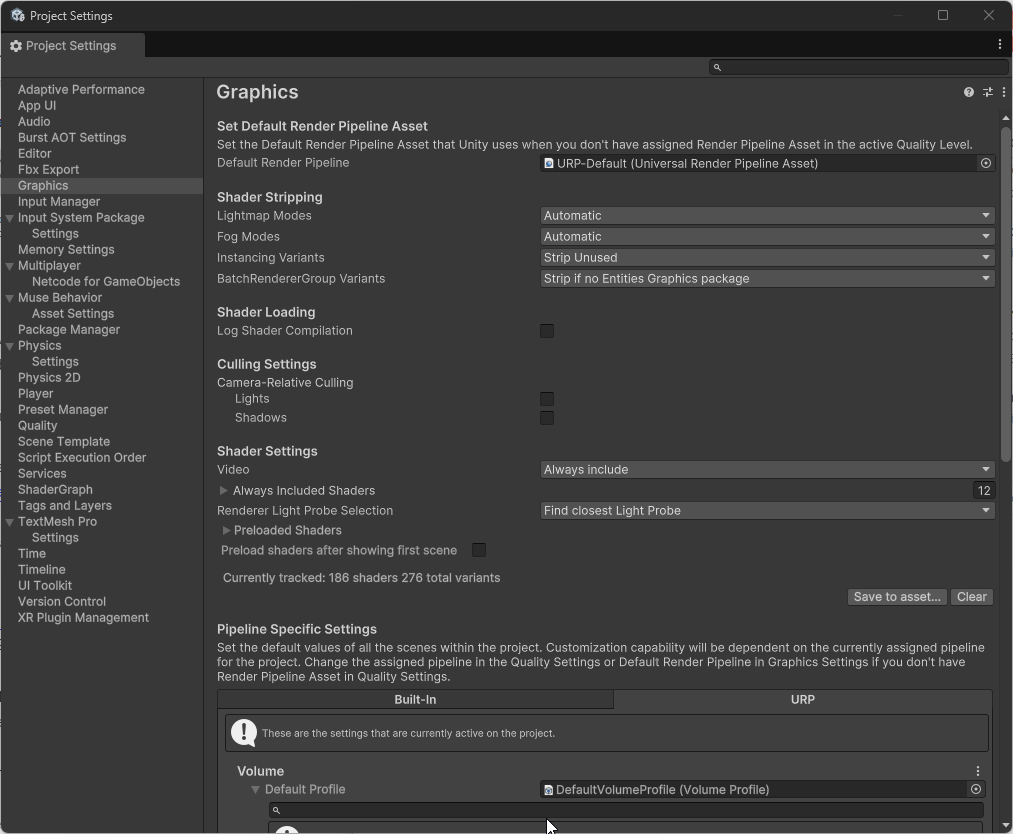
There are a lot of different locations where lightning settings in Unity / realvirtual can be impacted. Usually our realvirtual Prefab is having everything in what is needed.
Please check if our Default Render Pipeline is on:
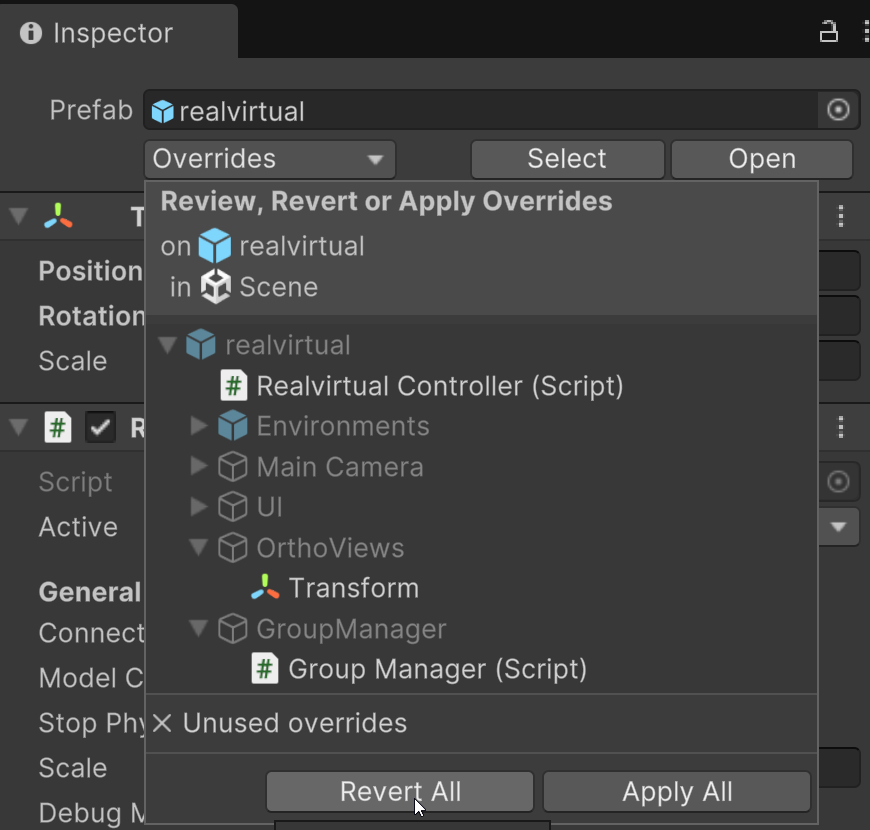
In realvirtualPrefab in your scene just reset the overrides for making sure that everything is as we defined it in Standard:
I am sorry, for this special type of robot i don't know a solution. All Unity asset store solutions are more gaming focussed and are as far as I know not able to calculate all the possiple solutions for one TCP position and orientation.
We are currently checking if this type would be possible and I expect to have an anwer end of next week.
Hi, because Unity and realvirtual.io are both open systems you could use in combination with realvirtual.io the Unity robotics hub: https://github.com/Unity-Technologies/Unity-Robotics-Hub
It might require some scripting for doing the interface to the realvirtual.io Drive and Signal concept.
Best regards
Thomas
Hi, currently this is not working with our IK calculation. It is limit to the robots which align with the doc.
We plan to extend in future but are still not sure if we are able to solve (we are using a special very fast calculated trigoneometrical solver).
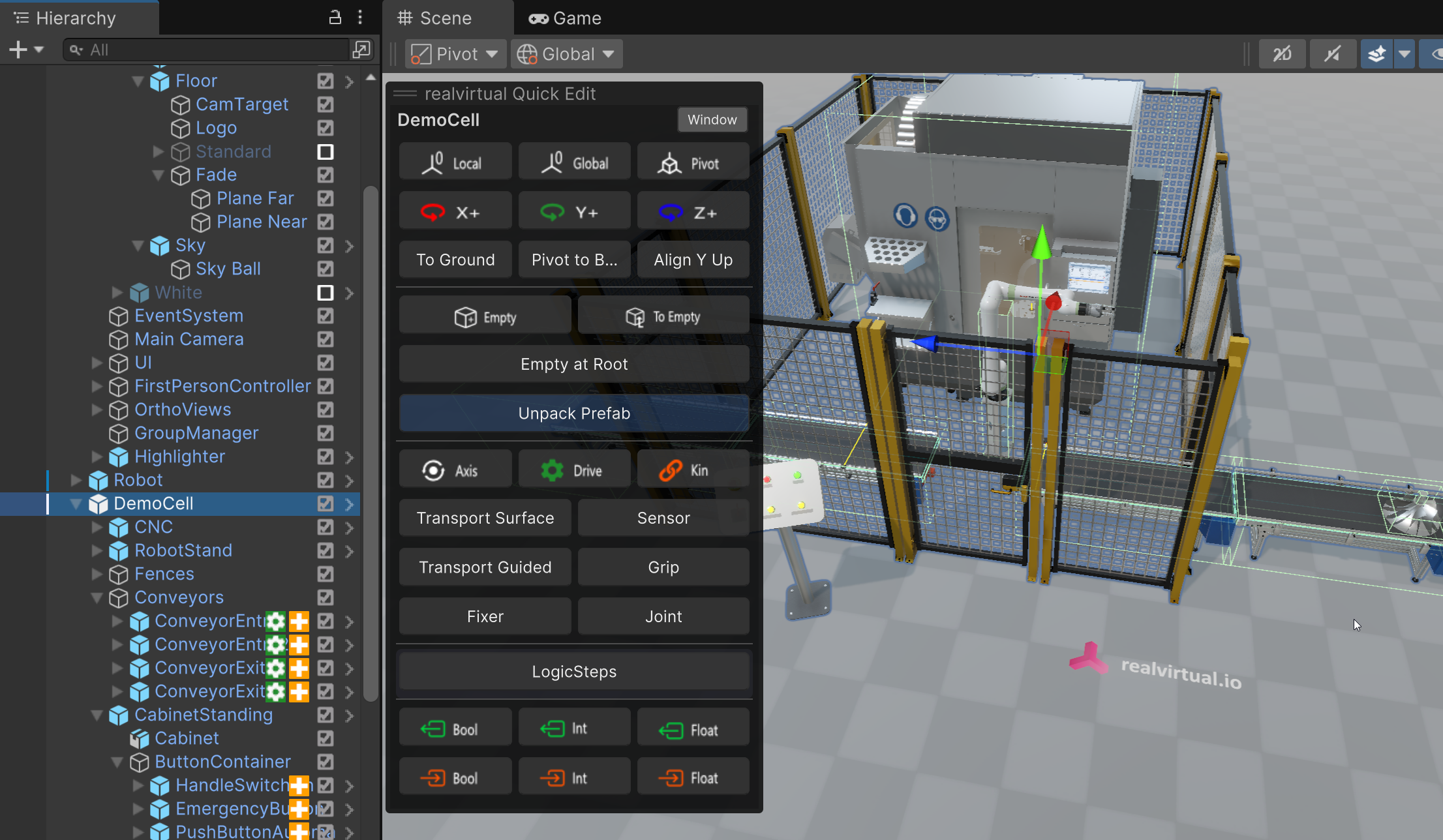
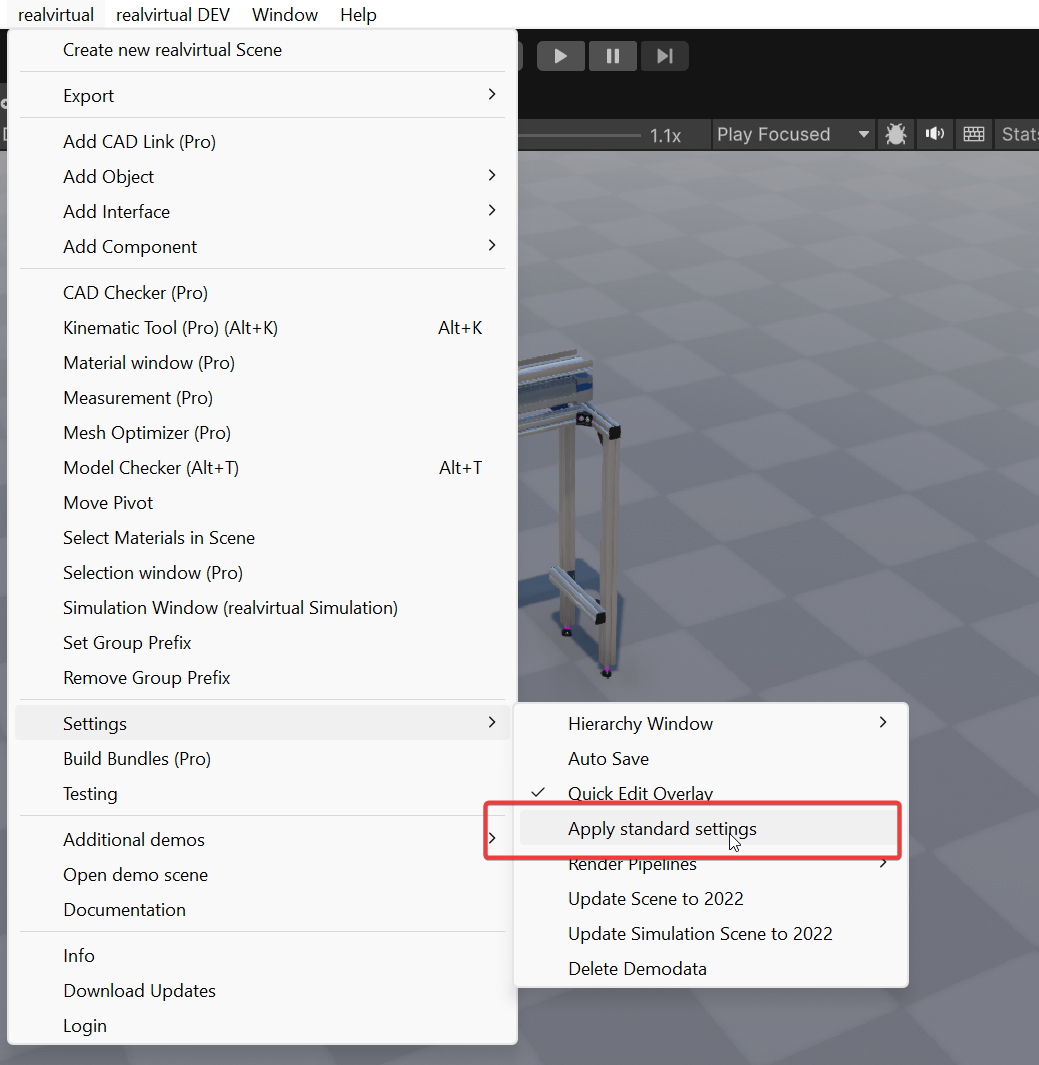
maybe the 1st error hindered to set the standard settings. please select in the realvirtual main menu the option Apply standard settings:
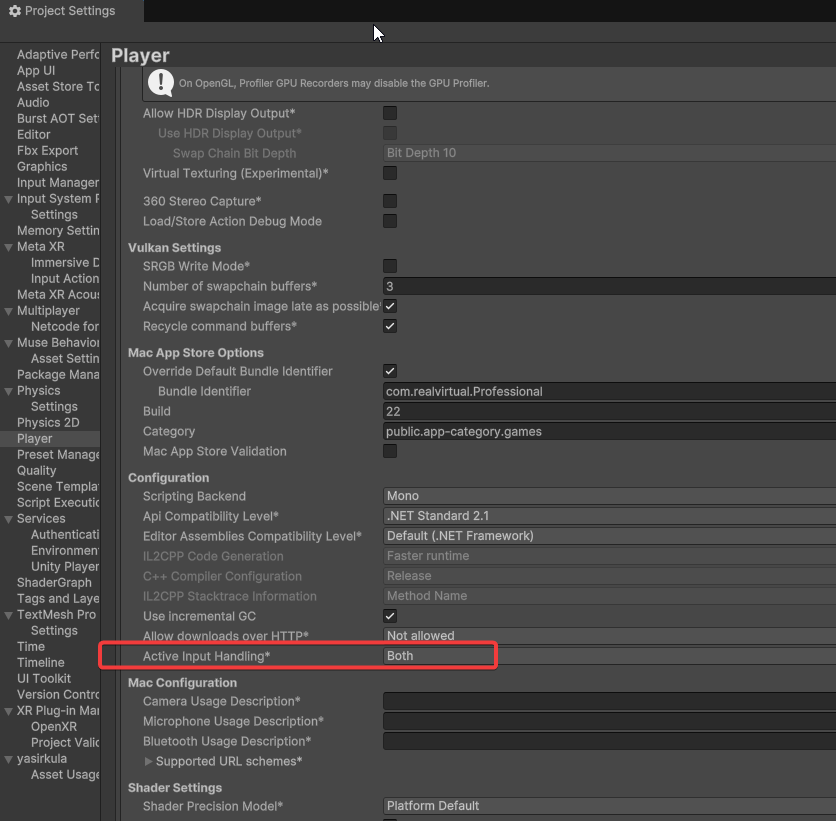
Please set in Project Settings > Player the Active Input Handling to "Both"
Customer support service by UserEcho


Hi, this is very strange. Did you started with a clean project. Also something to try - maybe there is old stuff in your Library Folder - close Unty, delete the Library Folder within your Unity Project and restart the Project again.
If this not helps please send us the project to:
https://realvirtual.io/send