Your comments
You need to implement your own move script based on mousedown and drag events. we will add it to the todo list for the next releases.
You need to develop your own interface based on this information:
https://doc.realvirtual.io/components-and-scripts/custom-interfaces
Question was (translated by Deepl):
In some projects, Party A is not allowed to access the PLC directly using the signal acquisition tool, but accesses the WEBAPI interface through Party A's device management platform. Is there a convenient way to make this connection in realvirtual.io?
You would need to implement a custom interface based on the WebApi specification
It looks like the issue you're encountering might be due to using realvirtual.io Professional 2022.15 with Simulation 2022.13. To resolve this, please revert to using both Professional 2022.13 and Simulation 2022.13 together.
We're currently working on upgrading both to version 2022.16, which should be available next week. If you need a hotfix in the meantime (a beta version of Simulation 2022.16 and Professional 2022.16), please email us at info@realvirtual.io.
Thank you for your patience!
Best regards, Thomas
If you encounter issues, follow these steps to resolve them while keeping references to realvirtual.io components in your user scenes:
- Close Unity.
- Delete the
Libraryfolder in your project directory. This action clears cached data and forces Unity to rebuild the project. - Restart Unity. Unity will regenerate necessary files from scratch.
- If the problem persists, close Unity again.
- Delete the entire
realvirtualfolder from your project. This action removes allrealvirtual.ioassets and configurations. - Open Unity again. Unity will load without the removed assets, but your scene references should remain intact.
- Re-import the
realvirtual.ioAsset. This step ensures that all components are restored, and references in your scenes torealvirtual.iocomponents are preserved.
These steps should help resolve most issues while maintaining the integrity of your references to realvirtual.io components in your user scenes.
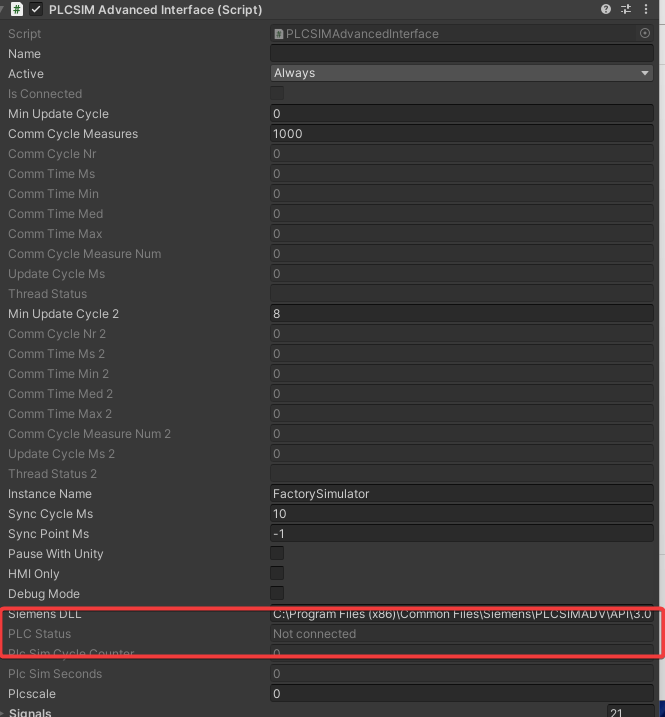
Please turn the DebugMode on on the PLCSimAdvancedInterface and check the log (both console and unity).
Please also replace your PLCSimAdvancedCoupter against this one and send us what you see in the Console log: PLCSimAdvancedCoupler.zip
Can you send us your console log and tell us what is displayed in the interface status?
Hello, have you deleted something in the project. It seems that some scripts are missing. This may be related to wrong assembly definitions or maybe the scripts are really missing. The first thing you should try is to delete the library folder in the Unity project and restart Unity.
If something in the realvirtual.io folder was accidentally deleted or changed, you can try to simply import realvirtual.io back into your project. It is always recommended to make backups or use a revision management system such as PlasticSCM.
Customer support service by UserEcho


Did you followed this:
https://doc.realvirtual.io/advanced-topics/troubleshooting