Your comments
Es ist eine neue Beta im Downloadbereich (https://game4automation.com/download/customers/).
Dort ist das Importproblem behoben.
Das Problem ist bekannt. Wir versuchen bis morgen ein Update zu erzeugen, das das Problem behebt. Bis dahin bitte die Nodes manuell anlegen.
We never used this on our own, but If Rslinx Classic Gateway is a OPCUA server - yes.
It should work like you are doing it. Maybe you missed the window that is opening when you select import. Please check the console log in case of any problems. The messages in there should give you hints. I don't know where the downloaded assets are stored by Unity if you want to install manually, but Google should answer you this.
Hi, as I can see you are using Unity 2018. You must use a suitable Unity Version (currently 2020 LTS).
You can always see this in the Asset Store:
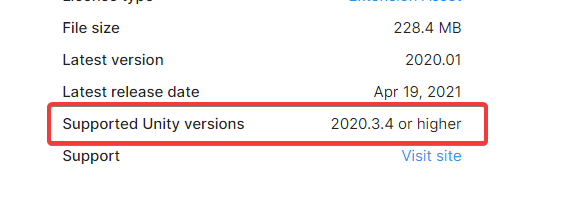
Hololens 1 and 2 are not supported
Sorry I can't read the question. But Hololens 2 is not supported.
Please check https://game4automation.com/documentation/current/opcua.html for more information about what platforms are currently supported.
Customer support service by UserEcho


Hi Ted,
I will check that tomororw. It seems to be bug.
Best regards
Thomas