Your comments
Hello, I'm sorry, I didn't understand.
Can you please briefly describe what use case you are talking about and what behaviour you want to emulate?
Are you talking about hardware/software in the loop? How a stacker drive should communicate with PLC?
Hello Andreas,
I have a few points that may also help:
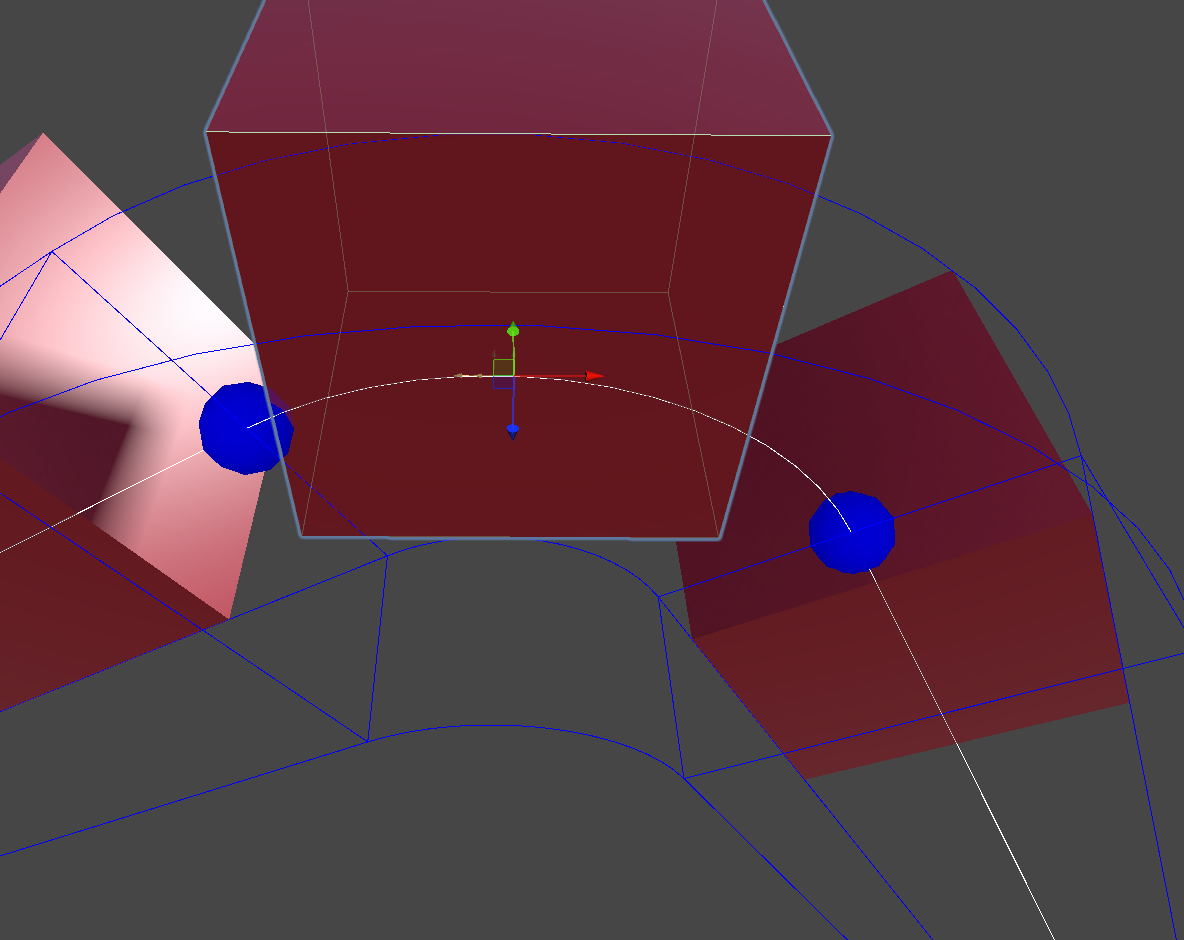
1. Distance between both Rigidbodies in Configurable Joint should be almost zero. Therefore, please check if Part Transform is on the conveyor surface, as in the picture below.
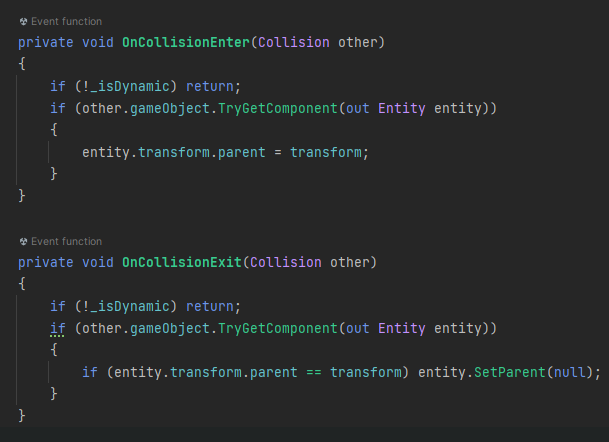
2. For movements with parts such as lifts, I use a reperenting practice. When lift surface collides with part, part is placed as a child of lift. When collider exits part is moved back to pull.
If you can't find a solution, you can contact me at buktop2402@gmail.com
Hello, in this example Box collider and Rigidbody have the default settings. Box collider is not trigger and Rigidbody is not Kinematic. I am not sure how the Guided Transport works now in current version. Please contact the development team directly.
As can be seen in the illustration, the part jumps onto the stopper because the stopper pushes the part upwards and at the same time the rigid body joint tries to keep the part on the projected line on the conveyor surface.
To avoid this, the stopper should collide with the side edge of the workpiece and act as a barrier to movement along the motion axis. In more specialized applications, the collision stopper and the collision part should be placed on separate layer in the collision matrix.
With kind regards, Viktor
You must check the scaling in whole hierarchy. For such kinematic chains I always do scaling Vector3.one and use scaling only for child gameobjects with mesh renderer.
More info for collision detection in Unity:
Hallo xingbutou, have you attached a collider for this object?
Hello, I don't know exactly if there is class for this in package. But you can try GameObjectRecorder
If you have joint angles, it's well doable:
1. Create DH matrixes and calculate Forward Kinematics
2. Calculate the TCP speed and the time span between two frames. Can you do something similar to this post from the ROS forum
Customer support service by UserEcho

Check this setting.
Projeect Settings > Player > Resolution and Presentation > Run In Background
https://docs.unity3d.com/ScriptReference/Application-runInBackground.html