Ihre Kommentare
Hello,
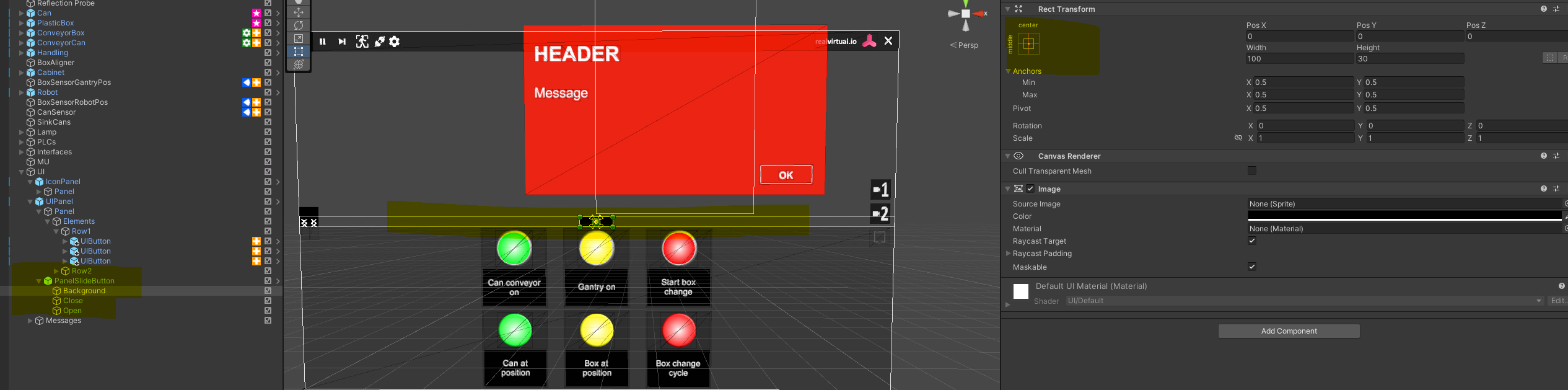
unpack the dupilcated prefabs complete and re-rarrage the elements of the slide button.
Regards
Christin
I see that ABB is not finding the UnityConnection. It seems that something is wrong configured on the ABB side. Will check tomorrow on the computer in the Office where ABB RobotStudio is installed if I can find our example project and send it to you. My advice would be also to first just start with a very simple config (e.g. just the axis values) and extend this later on as soon as the connection is up and running..
You seem to work on a non Windows Plattform. I think the space navigator drivers are the problem. Please delete the whole SpaceNavigator folder after importing the asset and select again "Apply Standard Settings"
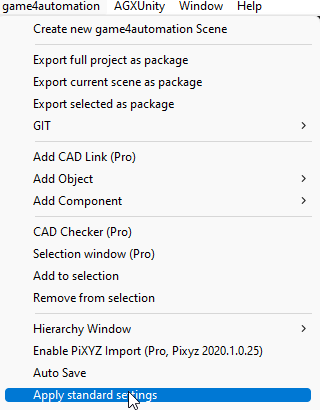
Assets/game4automation/private/RuntimeUI/SpaceNavigator
You can use for ABB Robotstudio the toolchain realvirtual - simit - ABB or realvritual - abb.
You should use Simit if you need to additionally connect Siemens PLC and for example if you need the special Siemens Drive models which Simit provides.
Hi, please remove the whole Spacenavigator Folder, this should resolve the problem.
Hi,
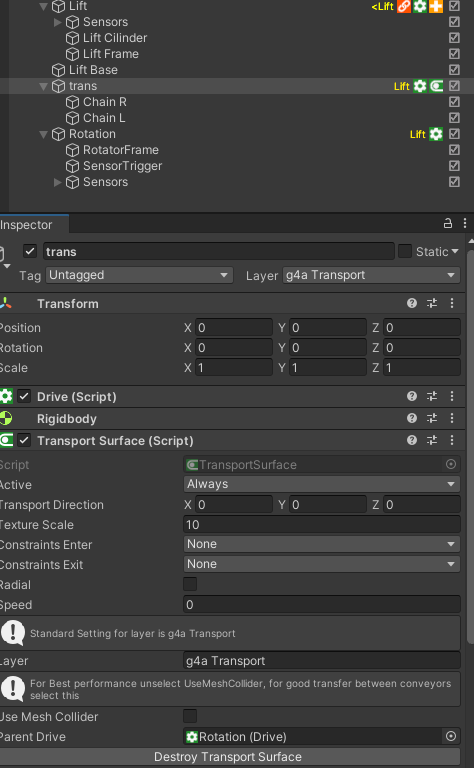
if you use a moving transport surface, please make sure that y is the up vector for both objects holding the drive components. To connect a moving transport surface to a further drive use the components kinematic and group. Example below:
Customer support service by UserEcho


Hello,
please check the lists of your game objects in the inspector. This error can occur if a game object is not present in a list or is missing.