Your comments
Hi,
currently it isn't possible to enter values by keyboard using HMI-components. Those components only using signals from the PLC to set or get values. For having an element to enter values you have to set up your own UI using unity standard UI elements like canvas etc.. An example in realvirtual you'll find in realvirtual/UI. This is where our UI is implemented.
Thanks for the hint concerning "SignalIntStart", I'll fix this with the next release.
Best regards
Christin
Hi, what do you mean with "recorders"?
We are usually using our Groups for Hiding things (using the SelectionWindow). We are currently working on an UI where you can also select the Groups to Hide or Display in Runtime but this is not released yet.
Hi, did you checked our Chain demo scene "DemoChain" - there you can see how we placed the points of the spline?
Hi, we will need to check this.
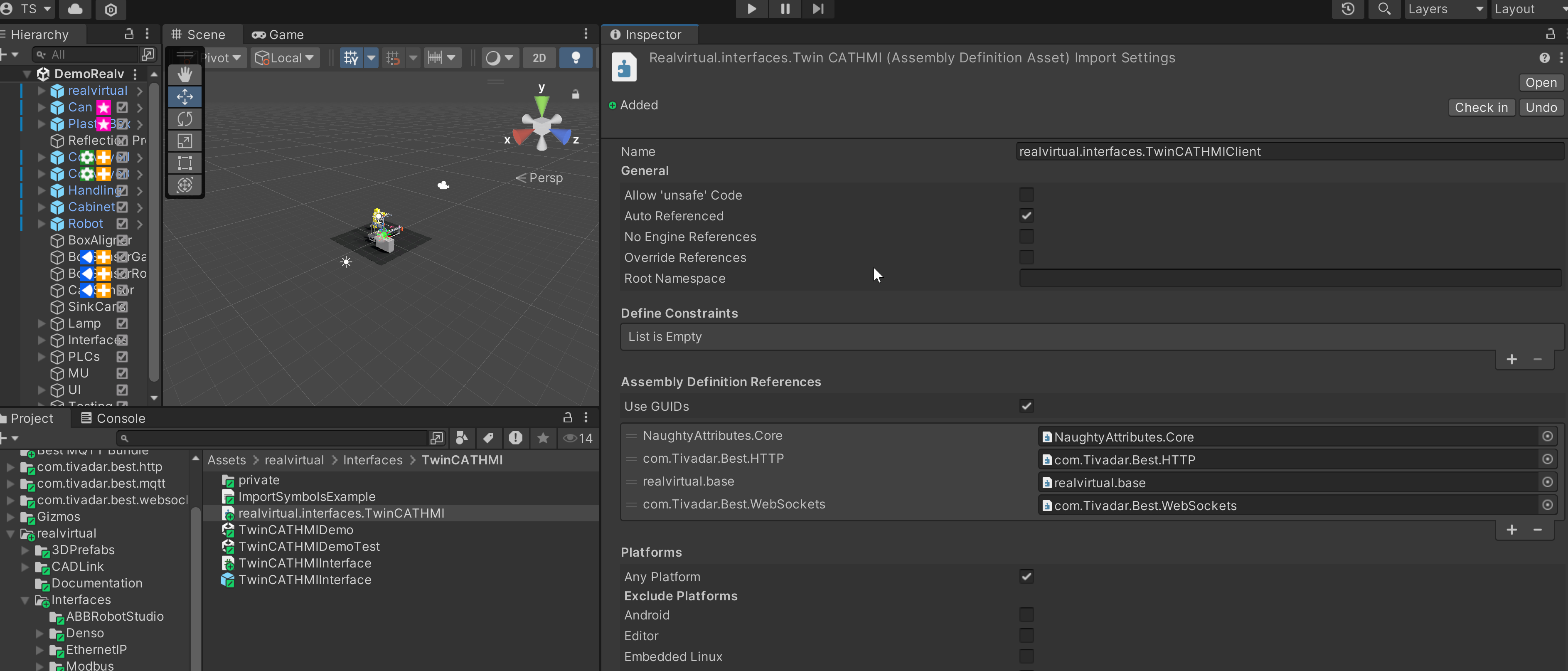
Please check that the TwinCATHMI Asembly Definitions are like that - or, if you don't need, delete fully TwinCATHMIin your project.
Please also try to close Unity, delete the Library folder out of the project and restart the project. Based on this it works on my machine.
You schould create your own script as a copy of one of the examples behavior models - for example of drive_destinationmotor.
Yes CalcFixedUpdate is called at the end by Unity FixedUpdate. Please check this about the update sequence. It is I think not important for your application, you could also use Unitys FixedUpdate but you should know the basics:
https://doc.realvirtual.io/components-and-scripts/motion/motion-for-developers
https://docs.unity3d.com/ScriptReference/MonoBehaviour.FixedUpdate.html
Is your application a commercial one?If yes maybe you could think about purchasing some support hours from our side.
you should do your code in fixedupdate then this will be called fast enough.
Also you could check "isatdestination".
Customer support service by UserEcho


This is due to physics limitations. Kombining IsKinematic and physical transports is not possible. You should use parent drive function:
https://doc.realvirtual.io/components-and-scripts/motion/transportsurface#transport-surfaces-and-unity-physics
or GuidedTransport:
https://doc.realvirtual.io/components-and-scripts/motion/guided-transport