Your comments
With which kind of OPCUA server are you having the problems? I will check with all our test opcua servers on Monday again.
Hi Bo,
I've build up a setup similar to yours but I can't create the failure. Are there any other paramter you are using?
Hi Bo, I have checked this issue and our guess was correct. There is a rounding problem which I have solved. I will postpone a hot fix until your second problem is also fixed.
There is only one repository. Currently there are only some robots in - so far nut much users shared own things. It is up to date.
Hello Bo, we are going to check this issue tomorrow. Maybe there is a rounding problem which is increasing over time. Basically what we do - because of the limitations of the unity physics in compination with "non physics" parent drives is to calculate the deltas of the parent drives and to add it to the transport surface direction. Our guess is, that maybe each cycle there is an very low rounding value which is added in the Up-Direction which might cause your problem. We are all today not in the office and I am going to check it tomorrow for finding a suitable solution.
If I understand your problem right the robot movement is not smooth. This might happen, ifthe cycle time for sending the current positions is to slow. Maybe you can change things on the OPCUA server or you could try to send less information. In General OPCUA is not well suited for real time applications. Other interfaces like S7, TwinCAT are much better performing for exchanging realtime data.
Hi,
we will need to check if we can generally replaye the DLLs. Is there more information why it stops?
Is ist stopping on all UWP builds or only if you build for Hololens. For Hololens we can't check because we don't have a hololens any more. In General we realized, when we tested with Hololens, that it is complicated to complile to Hololens. My advice would be to throw anything out of the project which could make problems. You should delete in the project:
- Cadlink
- All Interface folders that you don't need (most of them are not able to communicate on Hololens)
Best regards
Thomas
HI Bo, Hi Prely, complex transports with collissions are reaching the limits of Unity Physics. @Prely, thanks for the proposel, I will need to look deeper in it on the next days.
Specialy what we see in the video is only going to work with special coding. Pure Unity Physics are to limited here. So the standard conveyor in realvirtual is only a good solution it the transport direction is not very guided by some side guides and walls.
For the simulation library we implemented some special things like path based movements or the alignement on conveyors on entry. But for sure we will look into Prelys approach and think about, how and if we could integrate it into standard.
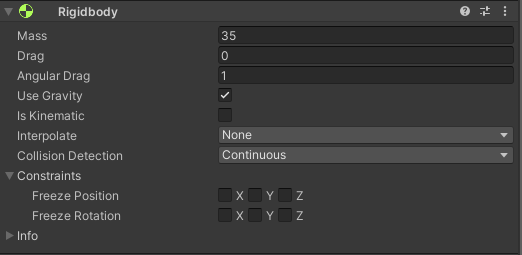
Just try the constraints of the rigidbody. This are just a few clicks before you redevelop the complete movement. You only need the rotation around y the rest could be freeze.
Customer support service by UserEcho


We had an issue with some timing, which I thought that it is solved. Which version are you using? I am today not in the office but I will take care on Monday.