Ihre Kommentare
Please change it like that - it seems that you are using an old release:
if (currentSelectionRaycast != null)
currentSelectionRaycast.IsActive = false;
I don't know which version you are exactly using. Just deactivating the Gameobject with the Main Camera should work. Can you send me the line of code which is creating the null reference. Maybe a null check there is helping.
Hallo,
bitte senden Sie uns die Szene als UnityPackage zu, damit wir das Problem prüfen und beheben können. Vielen Dank.
https://game4automation.com/send
Mit freundlichen Grüßen
Christin
We found the issue with Prosys OPCUA server:
https://forum.realvirtual.io/communities/1/topics/482-import-nodes-remains-importing-for-ever
We found the issue with Prosys.
https://forum.realvirtual.io/communities/1/topics/482-import-nodes-remains-importing-for-ever
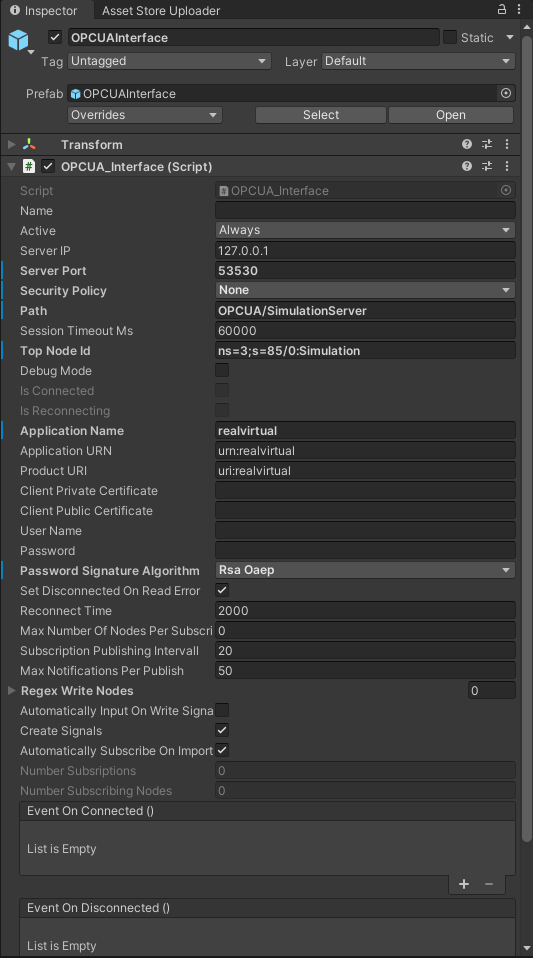
Hi, we have found a solution for Prosys. It was a problem with the underlying OPCUA library. With this setting we are now able to import (you need to select a topnode). It will be included in the next release (2022.11). Please get in contact with us if you need a beta earlier.
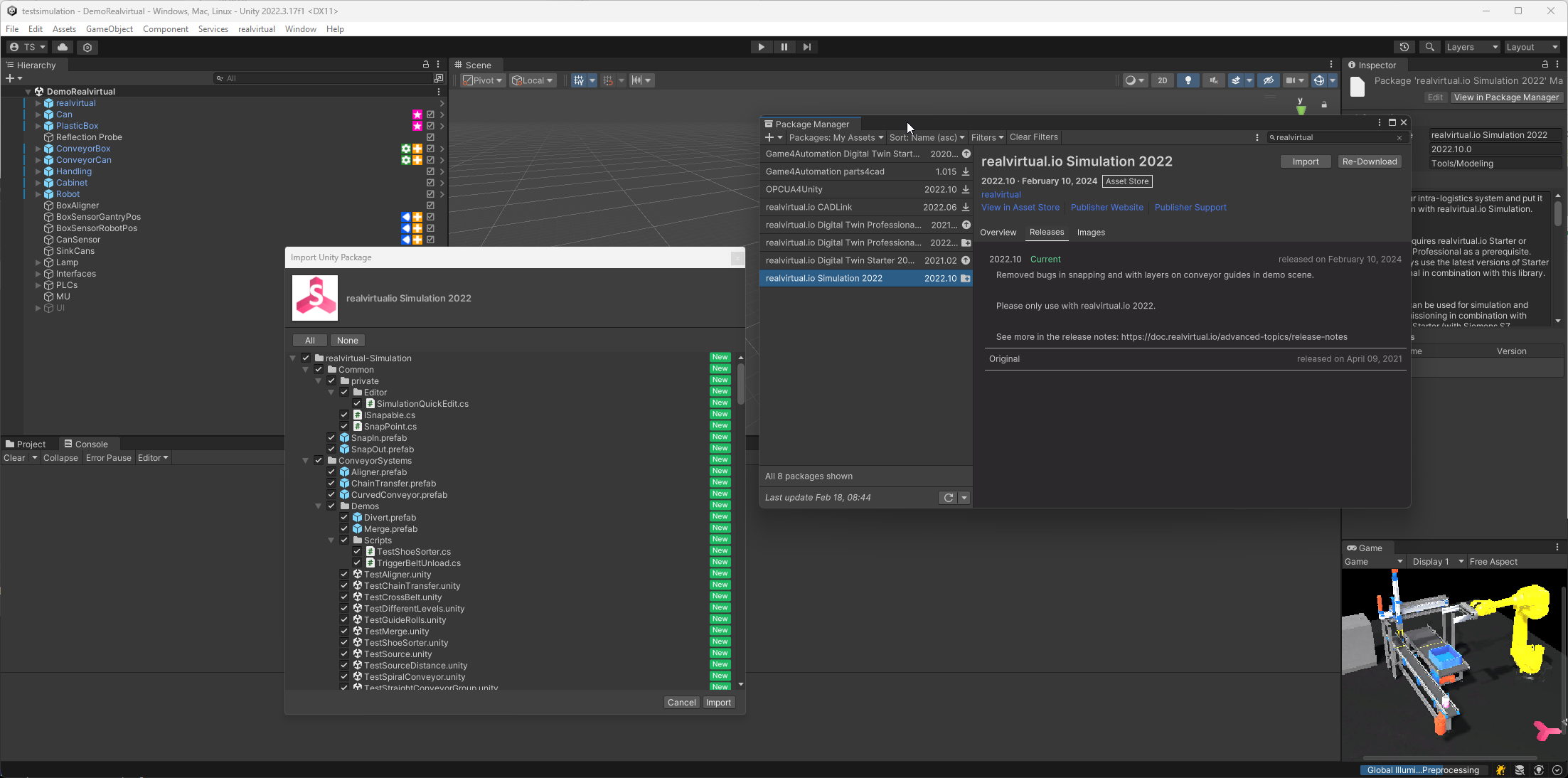
Hi, it seems that you purchased the old 2021 version and not the current 2022 version.
You could start a refund process at Unity and purchase the current version again.
Hi,
The images for the UIButton are automatically set according to the color defined in the UIButton component. Currently, using alternative images is not supported. However, HMI buttons from Professional/HMI can be utilized, allowing the definition of custom images. If Professional is not available, Unity UI components can be used in the current panels.
Hi,
we tested and everything is as it should be.
Maybe you did not updated (downloaded the new package of 2022.10) in the package manager (Update Button in the top right corner of Pakackage manager). After Update you need to Import.
Best regards
Thomas
Customer support service by UserEcho
Maybe it is just an animation issue - can you try changing the texture scale setting in transport surface.