Ihre Kommentare
Hallo,
Ich bin Student und mache die Simulation für meine Bachelorarbeit. Die Aufgabe ist es, eine Pick and Place Aufgabe mit einem Industrieroboter in Unity zu simulieren.
alles klar danke.
Ich kann es leider nicht runterladen
die kinematiken sind doch aber die selben oder nicht ? und die roboter sind auch vom selben Modell
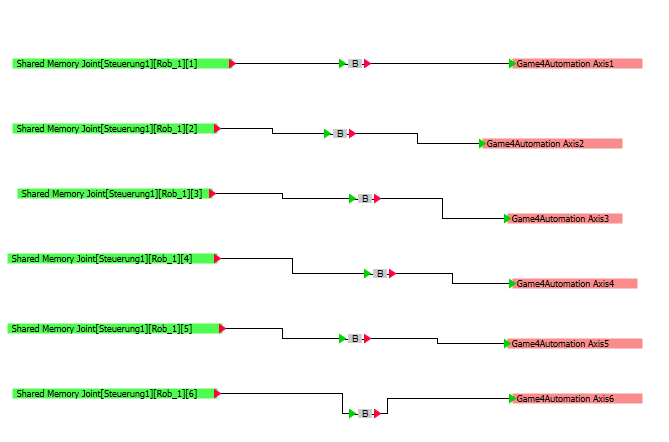
Um die achswerte bzw. Signale zu übertragen benutzte ich SIMIT
Hallo,
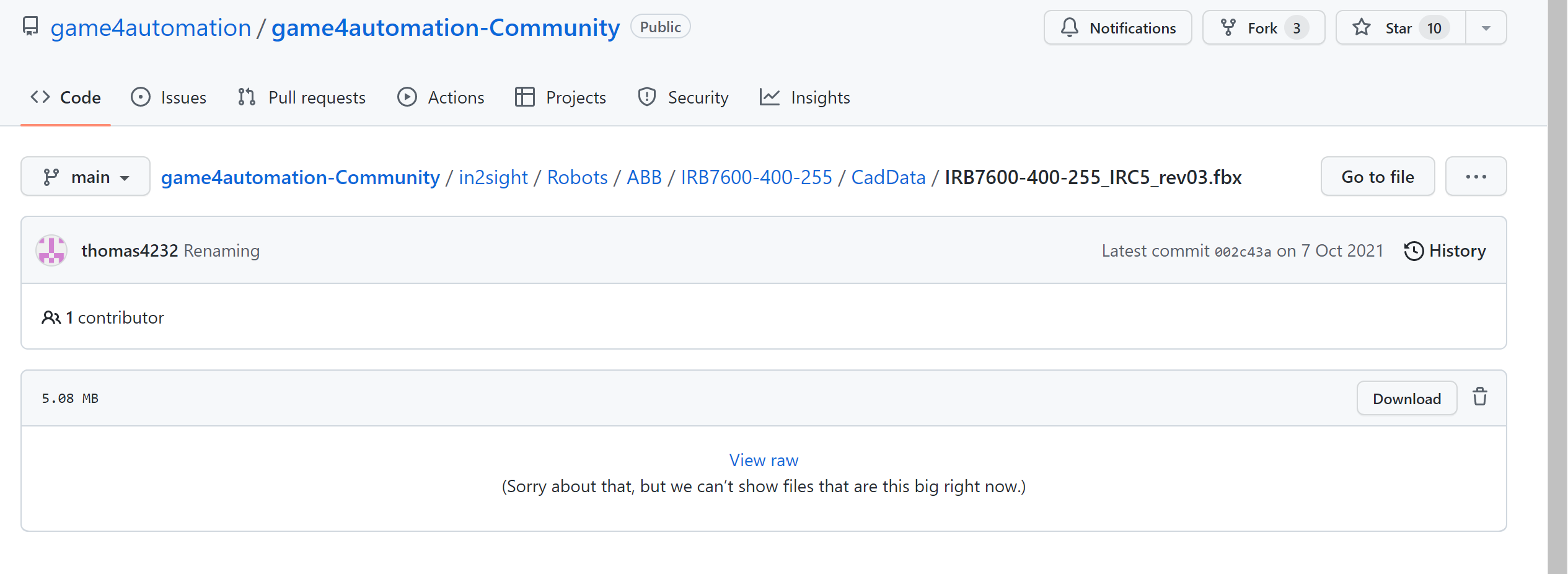
Ich versuche den Würfel (Beispiel) mit dem Roboter zu greifen indem ich den Roboter aus RobotStudio steuere.
1. Der roboter in unity fährt nicht die selbe Bahn ab wie der Roboter aus robotstudio, sondern spiegelverkehrt und die targets werden nicht so angefahren wie gedacht.
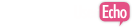
2. der Roboter in UNity greift den Würfel nicht. Ich habe der 6. Achse eine "Gripper" Komponente hinzugefügt.
Im endeffekt möchte ich erreichen dass Roboter in Unity ein Objekt aufnehmen und woanders platzieren kann.
Stimmt. Danke!
Es klappt jetzt.
Als nächstes soll der Roboter ein Objekt vom Förderband heben können. Wie kann das realisiert werden?
Anscheinend ist das der falsche konnektor. Welchn muss ich verwenden??
Hallo,
Auf Anfrage habe ich Zugriff auf Simit V11 bekommen. Ist es damit möglich die Simulation von RobotStudio auf Unity zu übertragen?
Customer support service by UserEcho