Ihre Kommentare
For the subscriptions I am totally sure that they are working. Is there a demo model with a demo opcua server where I can check your setup.
One more question - for me to be able to test. Is it a special issue when using multiple OPCUA interfaces in one scene or is it a generic issue also with one interface?
Ok will need to check. As an intermediate solution you could change to the latest release. There you can define a poll cycle for each node so the performance issue is solved when polling.
Are the values not updated correctly?
Can you please describe more how I should use your demonstration model you putted on our upload platform?
Hi,
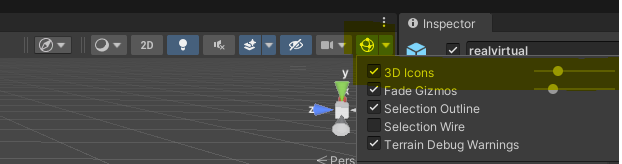
check the screenshot below. With 3D-Icon you can scale the gizmo size.
Regards Christin
Hi,
please check if the gizmos are enabled and check the scale of them.
Regards Christin
Thanks, we will need to check.
We released a new version including what you requestet. It is version 2021.17. You can find it on the Unity Asset Store and on our download pages - depending where you purchased it.
Yes you will get a beta asap.
Customer support service by UserEcho


I checked in a test scene and subscribed to the variables - i can't see any problem: