Ihre Kommentare
will are checking it later on this evening. You can also try using S7TCPIP interface with PLCSIMAdvanced
you can set this like this:
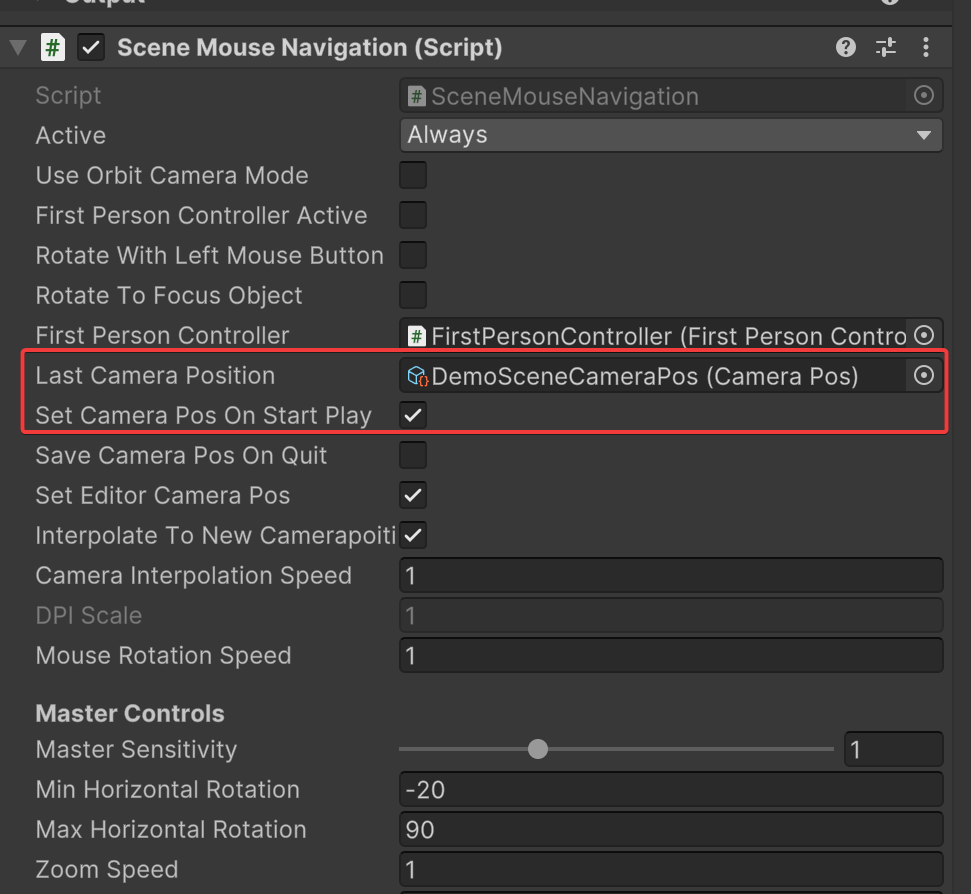
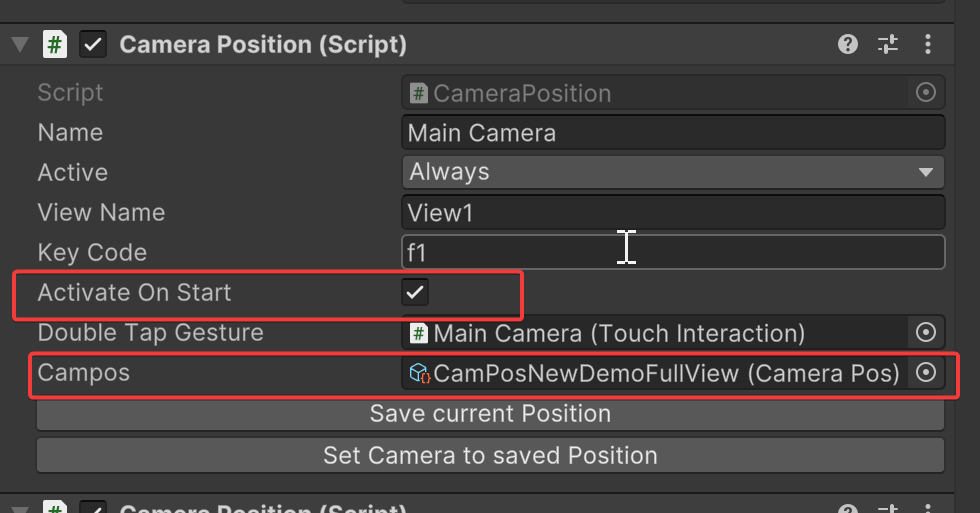
or you use camera position script - attached to main camera. Make sure that both settings dont interfere (just use one):
Hi, yes it is on our plans but not on the hight priority list. Mathematics of our IK would need to change for this. For the moment you can use RoboDK or the controller. Robot in the demo cell has been recorded while connected for example to FanucRoboGuide
Hi, an Input Area of a PLC is there to be written from the Outside (sensors, buttons or realvirtual in case of virtual commissioning).
To 1) maybe you did something wrong - you are able to clearly set signals which stay on the value from realvirtual.io. We provide realvirtual.io Support Hours for teaching you the basics if needed
To 2) there is no right way for doing it. Usually there is a company plc programming standard. from our side you can read and write to M, DB and to Inputs (only write) and Outputs (only read). The rest is up to you to decide depending what you want to do on the PLC side
To 3) No - realvirtual.io is made to support all possible customer standards. we are not experts in PLC programming, this is usually done on the side of our customers.
Honestly I don't kow in detail your setup so hard to answer. For sure there is no a very basic bug in our interface. PLCInputs are purely for writing to a PLC, PLCOutputs are purely for getting signals from a PLC. Sometimes PLC code or hardware inputs are overwriting values if wrongly configured but it is hard to give a detailed answer based on your setup.
Hi, this is exactly what a PLC is used for. There is a logic inside the PLC to react on Inputs and based on custom logic set the outputs. There is no real use case for an Input directly setting an Output. If you need some more deeper PLC Knowledge we have partners providing custom online training.
This is usually like this in all automation systems. Outputs and Inputs are clearly separated (also for security reasons). You can only write to outputs and read inputs on a PLC or RobotController.
can you explain a little bit more. What is exacly your setup - how is a Input modifying the output?
Customer support service by UserEcho


Can you please turn debug mode on and send me the full Unity Console log:
After you did this you should see in the log how to start it manually. Please use a windows console and start it for example like this in my test setup:
E:/realvirtual6/game4automation/PLCSimAdvanced/PLCSimAdvancedCoupler/PLCSimAdvancedCoupler/bin/Debug/PLCSimAdvancedCoupler.exe SIMIT_S71500_NurVar_1 10 -1 debug all
You should see something like this in the windows console. Please also send me your full console output which should begin like this:
Start PLCSimAdvanced Coupler V3256 [SIMIT_S71500_NurVar_1] with Cycle ms 10
Start Open Interface
Create Interface