Your comments
Hallo,
das funktioniert mit der ADS NetID und einer Route (die man mit der TwinCAT Config konfiguriert). Im Detail sind wir hier nicht Spezialisten aber die TwinCAT Doku sollte hier Auskunft geben wie das funktioniert. Auf beiden Rechnern muss hierfür ADS installiert sein. Das ist auch als separates Paket (ohne die gesamte virtuelle PLC und Programmierumgebung) auf den Beckhoff Seiten erhältlich.
Gruß
Thomas
How to read DBs is described here:
https://doc.realvirtual.io/components-and-scripts/interfaces/s7-tcp#reading-and-writing-dbs
Please note, that you can only read included date in the DBs which fit the standard signal types in realvirtual.io which means floats, bools and integers.
Hello,
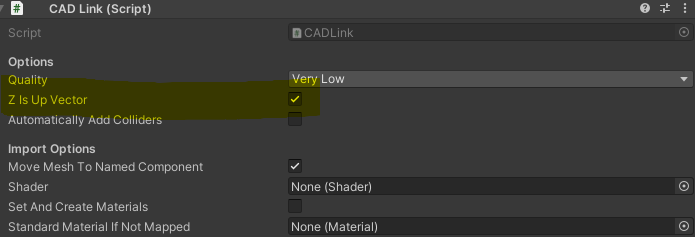
please check whether the option "Z is an upward vector" is activated or not. It is activated by default and leads to an automatic rotation after the import. Please let me know if the issue still occurs after checking this.
Regards Christin
The issue is solved in a beta package, which is available to our customers. Will be included in the next release (upcoming 2022.10).
Customer support service by UserEcho


It is hard to tell you what the issue is based on the information you provided. Can you send the model which is not working for you (full Unity project) via https://realvirtual.io/send?