Your comments
Hi, with WebGL you can only use Websocket based interfaces. This is a limitation by the Web standard and browsers and there is no way around that. This is why currently only a TwinCAT WebGL based interface is running with WebGL. All other PLC interfaces use different communication standards and don't work on WebGL.
Hi, you would need to delete some folders because mainly some interfaces are not working with IL2CPP and WebGL.
Please check the table here for knowing in detail what to delete:
https://doc.realvirtual.io/advanced-topics/supported-platforms
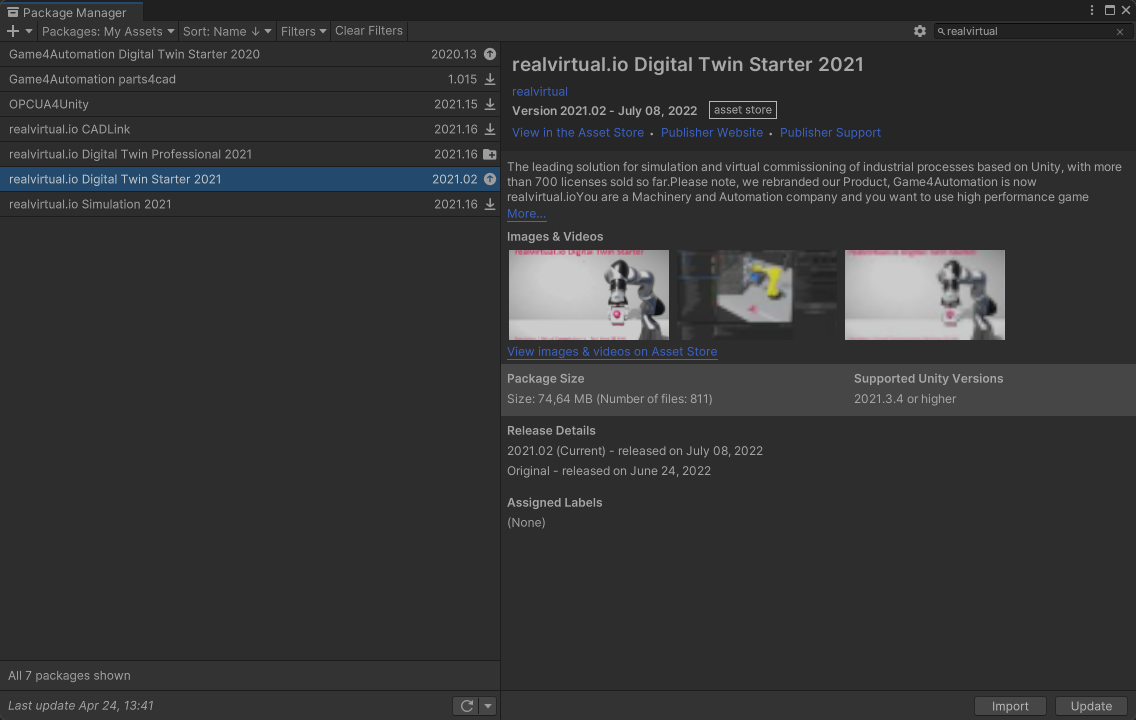
You should find it under "My Assets" - did you checked to find it there?
Please open the Package manager within Unity and import from there - like in my picture above. This should work. If not there might be a firewall issue with your computer.
Are you using a MAC? Can you show me your compiler defines:
https://doc.realvirtual.io/advanced-topics/compiler-defines
You could use standard Unity physical joints to get this working. Or you need to use Drive_Gear or Drive_CAM to relate the position of some slave axis to some master axis. Or you could do a custom script where you implement the relation between the different drives.
If you bought it over the Unity Asset Store you should see it in the PackageManager under MyAssets:
If you purchased it from us directly you can login here:
http://download.realvirtual.io/download
You will find the login information on your invoice (if you did NOT purchased over the Unity Asset Store).
Customer support service by UserEcho


Hi,
this error may possibly be due to a space in the path. Please test it with a path without spaces or special characters.
Regards Christin