Ihre Kommentare
Hi, I checked the issue. You are right - it is jumping slightly at each target.
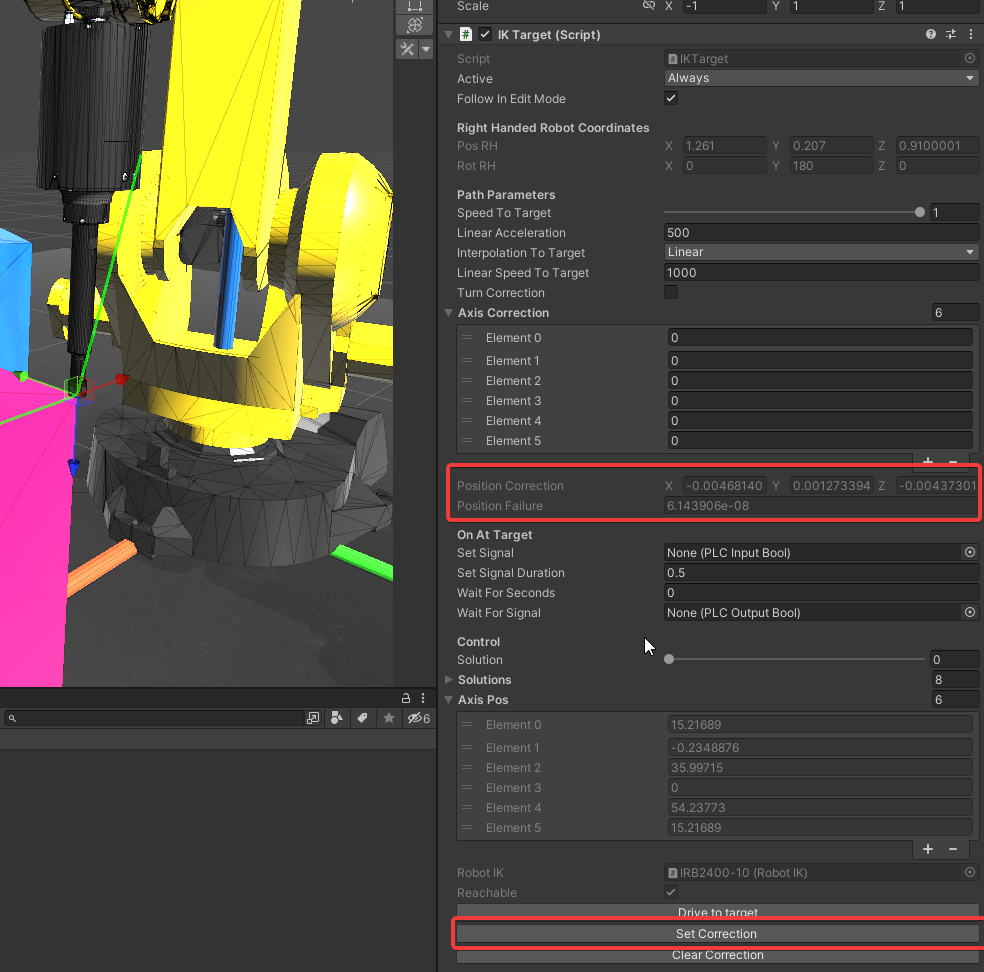
It seems the the IK algorithm has some inaccuracy and we get a misalignment of up to 5mm at each target. This is the reason for the jump. We think that calculated tcppos by ik == wished tcppos.
As a solution I currently only see to implement a correctional vector at each target and to optionally safe the correctional vector as soon as you teach the point. We also need to start the next path from the latest wished tcp and not the real tcp based on the current tcp transform position. Because putting in the current real tcp will result in the jump due to the inaccuracy. The changes might take some time - I think I can send you a beta next Monday.
Best regards
Thomas
Hi, Parts4CAD is already included in Starter. If I understood you right you added it via the asset store.
After Starter package installation you should have this menu
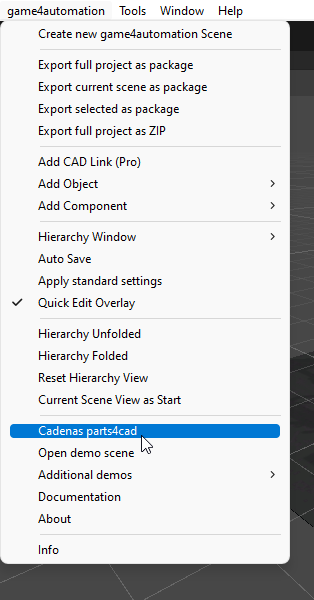
As soon as you select Cadenas parts4cad the needed addtional executables are loaded into the streaming assets folder.
Path is the location in the control plane of the CPU. Most of the time "1,0".
Hi, for the moment there is no solution for this. The values are calculated in a "BlackBox" inverse kinematic DLLs. Only solution that I see is, that you monitor and correct the values yourself.
Hallo, wir selbst verwenden auch auf allen unseren Rechnern Windows 11 Prof. und ich vermute auch viele der > 1000 Anwender. Das Problem ist mir aber total neu. Gibt es sonst irgendwas was einen Aufschluss über die Ursache geben könnte. Systemlog usw. Ich vermute nach wie vor dass es irgendwie mit Grafikkarte oder Grafikkartentreiber zusammenhängt. Kommt das Problem auch wenn nur Unity installiert ist ohne reallvirtual. Ich kann mir nicht vorstellen dass es an realvirtual liegt, ist ja nur ein "normales" Unity Asset und macht nichts direkt auf Grafikkarten oder Systemebene.
Hallo, das Problem ist mir nicht bekannt. Da realvirtual.io nichts direkt auf Betriebssystemebene unternimmt kann ich hier nur Grafikkartentreiber / Unity oder was auch immer vermuten. Sorry.
Customer support service by UserEcho


Hi,
yes through the PLC might be a good choice. Do you know any kind of protocol we could use to communicate with Fanuc Roboguide?