Ihre Kommentare
This happens if you move the things a very long time. Seems to be related to the Physics engine. In our Simulation Conveyor Library we implemented for this an option to align the MUs on entry on a conveyor. You would need to solve this by code or give the rigidbodys of a MU a constraint so that they are not able to turn.
Hi, do you have more information about that. Can you tell us how we can reproduce and test your problem?
Hello,
Please make sure that the MUs and the pusher have sufficient colliders. Nevertheless, the elements must be on certain layers: MU --> g4aMU; Pusher --> g4aTransport.(set in the inspector) The current parameter of the collider interaction you'll find here: Edit/Projectsettings/Physics.
Let me know if this solves the issue.
I am not shure if this is the problem but when fixing with signals - fixer is only doing things when signal is changing from low to high. so fixer should move in - then fix signal should get high (while unfix needs to be kept low) and then the part should be gripped.
Please check the demo , they should give you some examples how it works
We removed release on collssion non MU in latest release and also did some changes on the Fixer. Please check with the latest version (2021.16). There should also be a solution for your situation how you can solve it without "Release on collission non MU". You should update because in some signal conditions fixer did not worked properly in versions before 2021.16.
Hmmm - I can't reproduce your behavior. Do you have example projects where we can see that?
Easiest way for gripping is the Fixer component. You don't need to use any fingers.
You can find some examples about the fixer here and it is described in the docs here:
https://doc.realvirtual.io/components-and-scripts/fixer
You might have an extreme number of nodes in your opcua server. Please limit it by selecting a topnode-id which has lower number of nodes.
Hello,
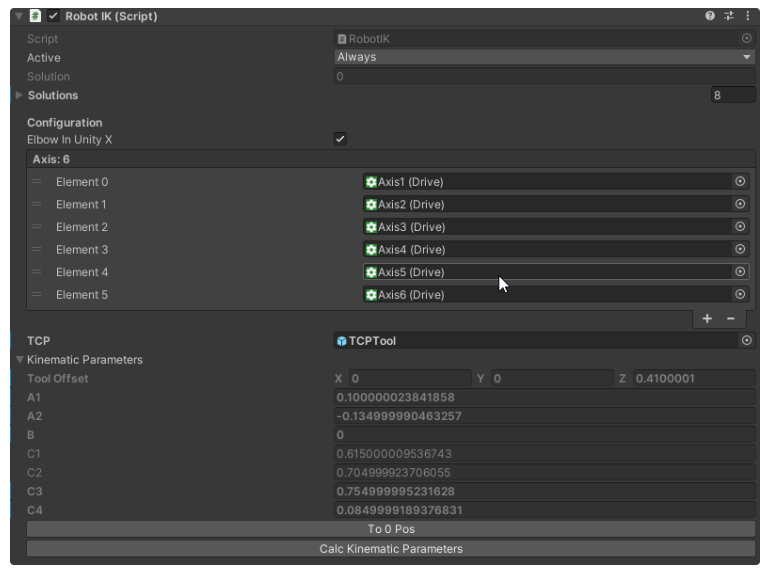
I have checked your upload.
The definition of the axis within the RobotIK component is missing. (see screenshot below).
Please define it and use the option above to update the drives.
There was also an error message in the console pointing in this direction.
Customer support service by UserEcho


Yes, the source is when duplicating itself automatically unfreezing all restrictions (because we have frozen them for the source itself to prevent the source to move). For the moment only possiblity is to set the restrictions after MU creation via code. We will think about a solution for the next release.