Your comments
Got it - Linux is not supporting Screen.dpi. You should insert this in line 456 in SceneMouseNavigation. It will be part of the next release in 3-4 weeks, for the moment you should change the code manually.
#if (UNITY_EDTOR_LINUX || UNITY_STANDALONE_LINUX)
DPIScale = 1;
#else
DPIScale = 144/Screen.dpi;
#endif
You are right - this happens only on Linux - will need to check and get back to you.
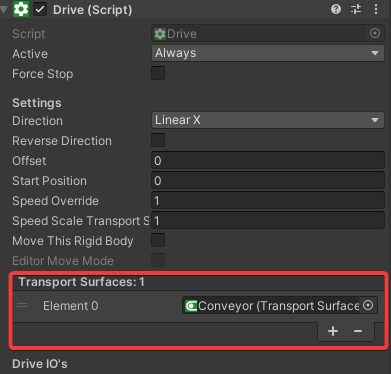
You should check our drives and transport surfaces in the demo model. There you could see how it must be setup. Basically each transport surface needs a drive at the same level or at any level above. Please check that the drives have a reference to the transportsurface. Usually this is set automatically:
Is fixed in latest release.
I am answering in English - this might help also international customers.
I think there is missing a drive on the same gameobject or at a level above the TransportSurface or maybe the connection is lost. You should check if there is a drive and if it is linked to the TransportSurface.
The box is falling down because something is wrong with the colliders. The box should be on the Layer MU and the Surface on the Layer Transport.
As I see you are using game4automation 2021. It might make sense to use realvirtual 2022 because there are big improvements in TransportSurfaces by the GuidedTransport function:
https://doc.realvirtual.io/components-and-scripts/motion/guided-transport
You can also check this tutorial about guided transport:
We changed and adopted all compile switches and Settings to Unity Editor on Linux. It will be in a few hours as a patch on the Unity Asset store. Please note, that SpaceNavigator, some special Interfaces (like SHM based for Simit) and CAD Step Import won't be available on Linux.
Customer support service by UserEcho


With a Raycast based Sensor you don't need to use colliders but you need to define the layers where the Raycast is sending to. It is the same Layer as the Sensor is and additional Layers which you can define.
For a non Raycast (Box Collider) based Sensor - the Sensor should be normally on the layer rvSensor. Please also check the doc information about the collsission matrix for colliders.