Your comments
Thanks a lot - which version are you using. In the current release we are able to build to Android? The compiler define of your work around is a solution - in current release it should be solved by the assembly definition.
Hi, I am on it but still no solution - will continue tomorrow.
Best regards
Thomas
Hi,
I was able to repeat this behaviour in my environment and passed it on to my colleagues to look for a solution.
Regards Christin
Hi,
I have setup the situation as you described.
The settings in my Grip-script are the following:
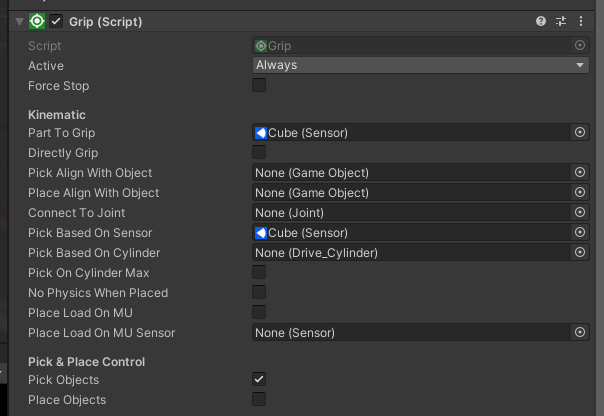
With this settings it works when you switch between pick and place during the game mode. The Fixer only keep the MU if the gripper is set to place. The gripper always holds the higher priority.
According to your screen shots I'm not quite sure how the picking was able to work because there is no pick mode defined.
(for this have a closer look in out documentation: Grip - realvirtual.io User Documentation (gitbook.com).
Kind regards
Christin
Hello,
I have checked your project and solved the problem:
- I added an empty game object to the hierarchy
- add to the layer "rvSelection"
- moved the post process volume from the main camera to the empty game object.
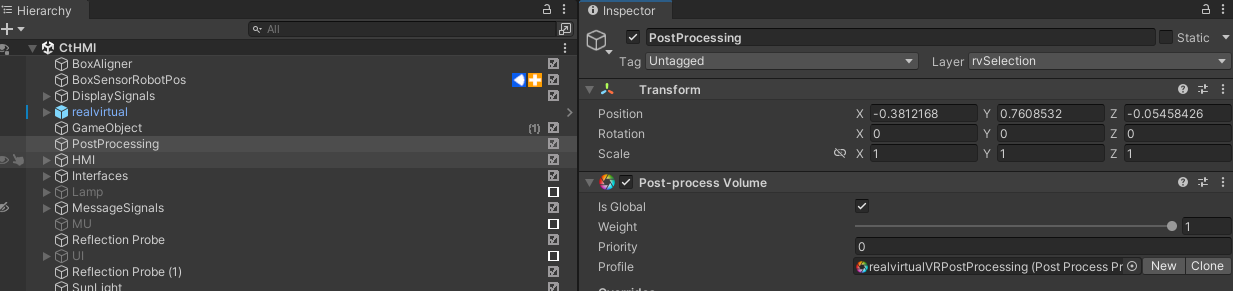
- added the scene in the build settings
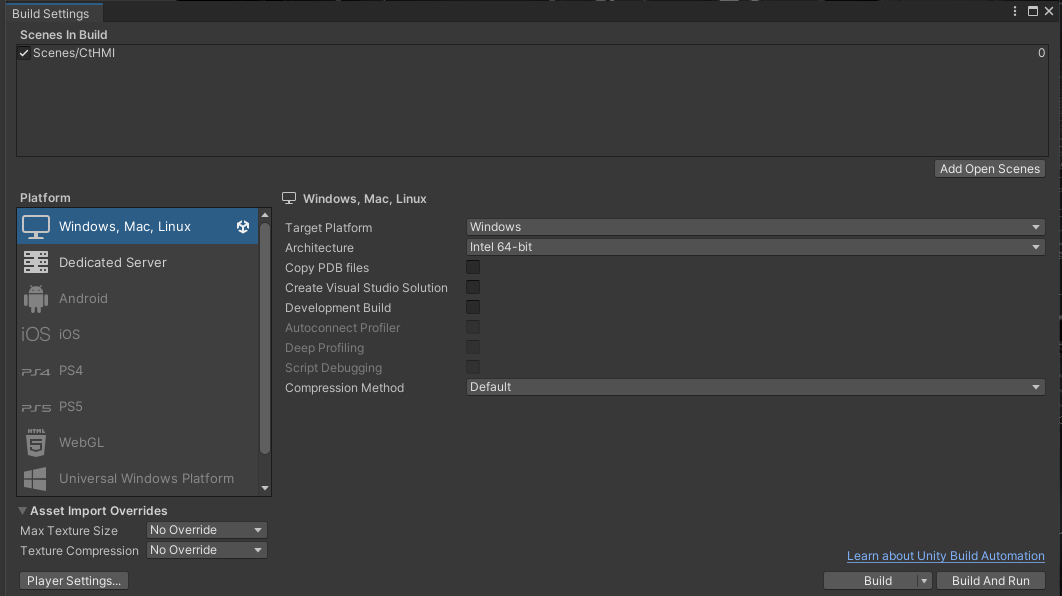
With this the build was successful. Please evaluate this on your version and let me if it works.
Kind regards
Christin
Hi, this is a non blocking step - this is why it is getting in a infinite loop.
Hi Markus,
we just need somebody who is able to test the WinMod interface. I is somewhere in our dev-branches. I can check and forward it to you. But your students should get in touch with us - we might need to debug via Teamviewer - because I am pretty sure that it is still buggy. Best regards Thomas
Customer support service by UserEcho


Hi, I am still working on it. For the moment there is no workaround. I am trying to get this week a solution.