Your comments
So far there is no way for doing it. Usually we import the signals once and when we restart, we expect that all signals are there. What about implementing a special PLC counter which you could check and know that the connection is fully up and running?
Hi, currently we have only have Inputs and Ouputs and not a combination of both. You could define a PLCOutput with the current value and one PLCInput with a Set Value. So if you start Unity you can read the PLCOutput.
Hallo,
ich habe Ihnen eine Email mit einem aktualisierten Skript zukommen lassen. Ab dem nächsten Release ist die korrigierte Animation verfügbar.
Gruß Christin
Hallo,
danke für das Video, damit lies sich die Situation einfacher nachvollziehen. Die Animation der Fläche funktioniert aktuell beim Abbremsen der Surface nicht korrekt. Wir arbeiten hier an der Lösung.
Allerdings ist es auch nur die Animation, es hat somit keinen Einfluss auf die physikalische Abbildung des Transportes. Somit können sie normal weiterarbeiten.
Gruß
Christin
Ok verstanden wir schauen es uns morgen nochmal an.
Hallo,
ggf. handelt es sich hier um ein Missverständnis.
Die optisch sichtbare Oberfläche ist eine reine "Animation" auf Basis der Textur und deren Skalierung. Die Bewegung des Fördergutes ist rein physikalisch.
Zuerstmal haben die beiden Dinge nichts miteinander zu tun und es lässt sich nicht automatisch verbinden weil grundsätzlich die Textur sehr individuell sein. Damit die "Animation" nun identisch zur Fördergeschwindigkeit ist (was zuerstmal reine Optik ist) muss in der Transportsurface der Texturescale passend eingestellt werden.
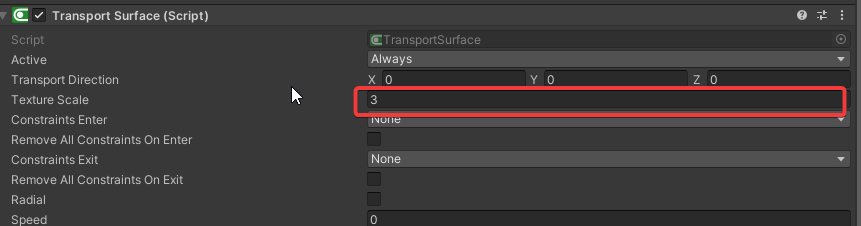
Der Wert ist abhängig von der Größe des Meshes sowie der Größe und Skalierung der Textur (d.h. den Einstellungen im Renderer des Materials).
Beantwortet das die Frage?
Gruß
Thomas
Hallo,
ich habe in meinem Test aktuell erstmal nichts gesehen. Können Sie ein Video zusenden indem das Verhalten zu sehen ist.
Es wäre auch gut, wenn die entsprechenden Parameter im Inspector zu sehen sind.
zur "Smooth Acceleration": hier wird einfach die Beschleunigung anders berechnet, um eine sinoide Beschleunigung zu haben.
An sich muss der beschriebene Effekt an dem SetDirty liegen. Bitte probiere mal EditorUtility.SetDirty(component);
Customer support service by UserEcho


Hi, I will need to check in detail if we can improve the bad node handling. Will let you know latest tomorrow if we have got a solution.
Thomas