Teilen Sie Ihre Erfahrunge und Wünsche mit uns und anderen Usern!

 I used mono build normally, but I used il2cpp incorrectly
I used mono build normally, but I used il2cpp incorrectly
D:\soft\2021.3.18f1c1\Editor\Data\il2cpp\build\deploy\il2cpp.exe @Library\Bee\artifacts\rsp\10185664654020197962.rsp
Error: IL2CPP error (no further information about what managed code was being converted is available)
System.AggregateException: One or more errors occurred. (The given key 'nop' was not present in the dictionary.)
---> System.Collections.Generic.KeyNotFoundException: The given key 'nop' was not present in the dictionary.
at System.Collections.Generic.Dictionary`2.get_Item(TKey key)
at Unity.IL2CPP.DataModel.Instruction..ctor(Instruction instruction)
at Unity.IL2CPP.DataModel.BuildLogic.Populaters.MethodBodyPopulator.CreateInstructions(CecilSourcedAssemblyData assemblyDef, MethodDefinition method, MethodDefinition source, ReadOnlyCollection`1 variables, Dictionary`2& instructionMap)
at Unity.IL2CPP.DataModel.BuildLogic.Populaters.MethodBodyPopulator.PopulateMethodBody(CecilSourcedAssemblyData assemblyData, MethodDefinition method, MethodDefinition source)
at Unity.IL2CPP.DataModel.BuildLogic.Populaters.DefinitionPopulater.PopulateMethodDefs(CecilSourcedAssemblyData assemblyData, TypeDefinition typeDef)
at Unity.IL2CPP.DataModel.BuildLogic.Populaters.DefinitionPopulater.PopulateTypeDef(TypeContext context, UnderConstructionMember`2 type)
at Unity.IL2CPP.DataModel.BuildLogic.DataModelBuilder.b__13_1(UnderConstructionMember`2 typeDef)
at System.Threading.Tasks.Parallel.<>c__DisplayClass44_0`2.b__1(IEnumerator& partitionState, Int32 timeout, Boolean& replicationDelegateYieldedBeforeCompletion)
--- End of stack trace from previous location ---
at System.Threading.Tasks.Parallel.<>c__DisplayClass44_0`2.b__1(IEnumerator& partitionState, Int32 timeout, Boolean& replicationDelegateYieldedBeforeCompletion)
at System.Threading.Tasks.TaskReplicator.Replica`1.ExecuteAction(Boolean& yieldedBeforeCompletion)
at System.Threading.Tasks.TaskReplicator.Replica.Execute()
--- End of inner exception stack trace ---
at System.Threading.Tasks.TaskReplicator.Run[TState](ReplicatableUserAction`1 action, ParallelOptions options, Boolean stopOnFirstFailure)
at System.Threading.Tasks.Parallel.PartitionerForEachWorker[TSource,TLocal](Partitioner`1 source, ParallelOptions parallelOptions, Action`1 simpleBody, Action`2 bodyWithState, Action`3 bodyWithStateAndIndex, Func`4 bodyWithStateAndLocal, Func`5 bodyWithEverything, Func`1 localInit, Action`1 localFinally)
--- End of stack trace from previous location ---
at System.Threading.Tasks.Parallel.ThrowSingleCancellationExceptionOrOtherException(ICollection exceptions, CancellationToken cancelToken, Exception otherException)
at System.Threading.Tasks.Parallel.PartitionerForEachWorker[TSource,TLocal](Partitioner`1 source, ParallelOptions parallelOptions, Action`1 simpleBody, Action`2 bodyWithState, Action`3 bodyWithStateAndIndex, Func`4 bodyWithStateAndLocal, Func`5 bodyWithEverything, Func`1 localInit, Action`1 localFinally)
at System.Threading.Tasks.Parallel.ForEachWorker[TSource,TLocal](IEnumerable`1 source, ParallelOptions parallelOptions, Action`1 body, Action`2 bodyWithState, Action`3 bodyWithStateAndIndex, Func`4 bodyWithStateAndLocal, Func`5 bodyWithEverything, Func`1 localInit, Action`1 localFinally)
at System.Threading.Tasks.Parallel.ForEach[TSource](IEnumerable`1 source, Action`1 body)
at Unity.IL2CPP.DataModel.BuildLogic.Utils.ParallelHelpers.ForEach[TSource](IEnumerable`1 source, Action`1 func, Boolean enableSerial)
at Unity.IL2CPP.DataModel.BuildLogic.DataModelBuilder.PopulateCecilSourcedDefinitions(ReadOnlyCollection`1 assemblyData)
at Unity.IL2CPP.DataModel.BuildLogic.DataModelBuilder.Build()
at Unity.IL2CPP.Contexts.Components.DataModelComponent.Load(LoadSettings loadSettings, Boolean ownsTypeContext, Boolean ownsBuilder, DataModelBuilder& builder)
at Unity.IL2CPP.AssemblyConversion.Phases.InitializePhase.Run(AssemblyConversionContext context)
at Unity.IL2CPP.AssemblyConversion.Classic.ClassicConverter.Run(AssemblyConversionContext context)
at Unity.IL2CPP.AssemblyConversion.AssemblyConverter.ConvertAssemblies(AssemblyConversionInputData data, AssemblyConversionParameters parameters, AssemblyConversionInputDataForTopLevelAccess dataForTopLevel)
UnityEngine.GUIUtility:ProcessEvent (int,intptr,bool&)
IL2CPP erro
Exception: IL2CPP error for method 'UnityEngine.Quaternion game4automation.IKCalculator::(UnityEngine.Quaternion)' in assembly 'D:\ZhangKang\IA_dev\Temp\StagingArea\Data\Managed\ikcalculator.dll'
System.NullReferenceException: Object reference not set to an instance of an object.
my unity version is 2020.3.33。 I've been dealing with this problem for too long and don't know what to do。please help me

About the most package
您好,由于我更新 Professional 2022.15版本后报错,项目无法正常进行下去,并且unity包管理器里面没有历史版本下载2022.13,导致我无法进行工作,我已经给邮箱发送我的发票号但是没有收到关于Professional 2022.16 and Simulation 2022.16回复, 请您有空发送邮箱给我2022.13或2022.16的Professional和Simulation 的包。
十分感谢。

 Error in Script "NaughtyInspector.cs". What can I do?
Error in Script "NaughtyInspector.cs". What can I do?
Hello,
suddenly after updating from 2022.13 to 2022.15 in console appears the following error messages:
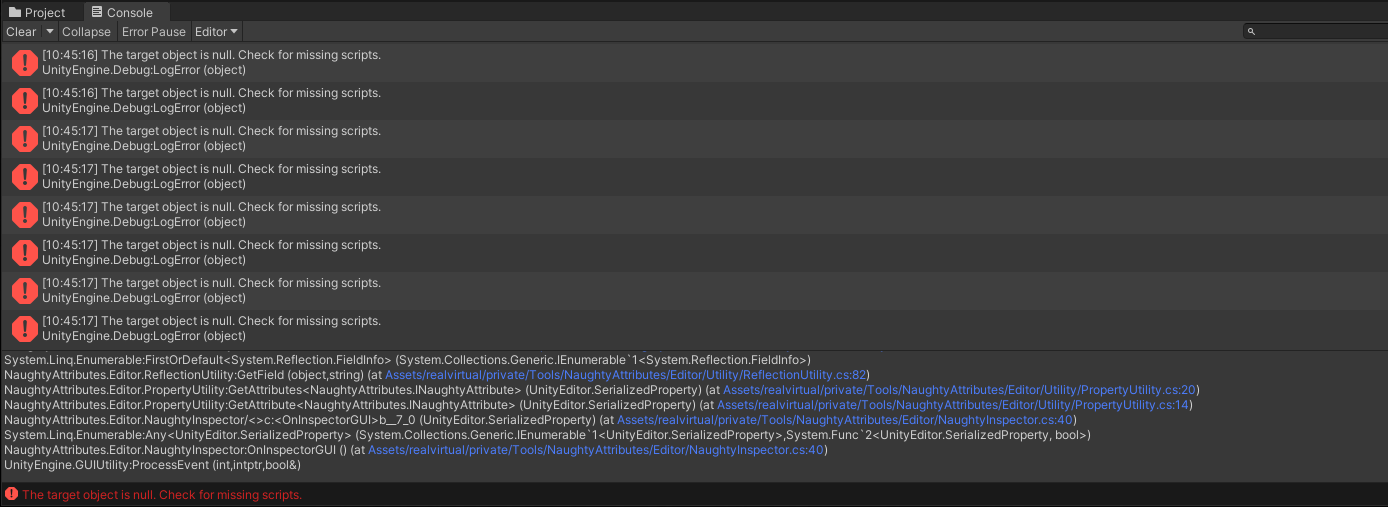
What can I do to find out where the problem is?
I am not 100% sure if it's exactly after the update BC I also did some own changes.
SnapPoint.OnStart()': no suitable method found to override
Assets\realvirtual\Professional\SnapPoints\private\SnapPoint.cs(37,33): Assets\realvirtual\ professional \ snappoints \private\ snappoint.cs error CS0115: 'SnapPoint.OnStart()': no suitable method found to override

Issue is solved with newest 2022.16 release. Please use 2022.16 Professional and 2022.16 Simulation together. On Problems when updating please also consider this:
Meta Quest 3 VR Main Camera
Hello,
I have a question regarding the Main Camera in the realvirtual gameobject. I've searched through the forum and saw a 3 year old post where you suggest to just delete or deactivate the realvirtual main camera. When I do that, the realvirtual controller script component in the realvirtual gameobject deactivates itself. What i did for now is increasing the rendering priority of my XR Origin Main Camera to avoid issues. Is there a better solution to this?

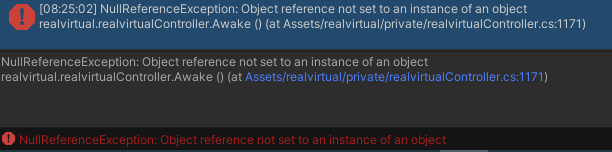
I don't know which version you are exactly using. Just deactivating the Gameobject with the Main Camera should work. Can you send me the line of code which is creating the null reference. Maybe a null check there is helping.
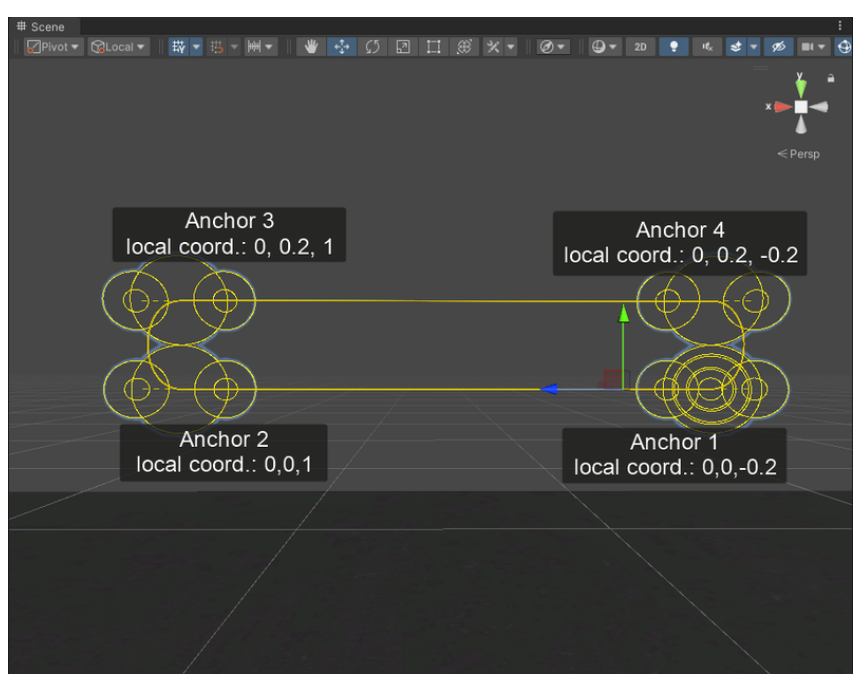
Guided Transport
Hallo,
ich habe ein Problem festgestellt: Sobald sich mein Materialtransport in der Guideline bewegt, dreht es sich und setzt seine Bewegung langsam fort, ohne dass ich es steuern kann. Ich verwende eine normale Transportoberfläche mit Guideline, und die Materialtransporteinheiten (MUs) sind auf Guided MU eingestellt. Selbst in der Demo mit meinen STEP-CAD-Daten funktioniert es nicht. Woran könnte das liegen?
Hi,
we tested and everything is as it should be.
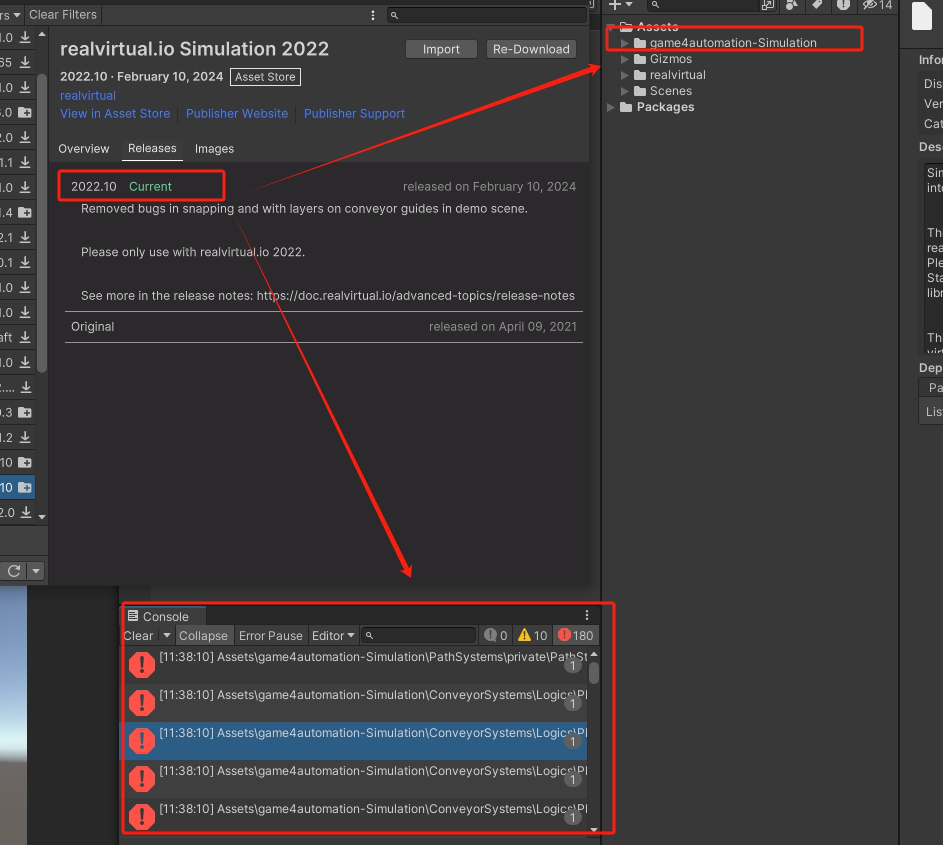
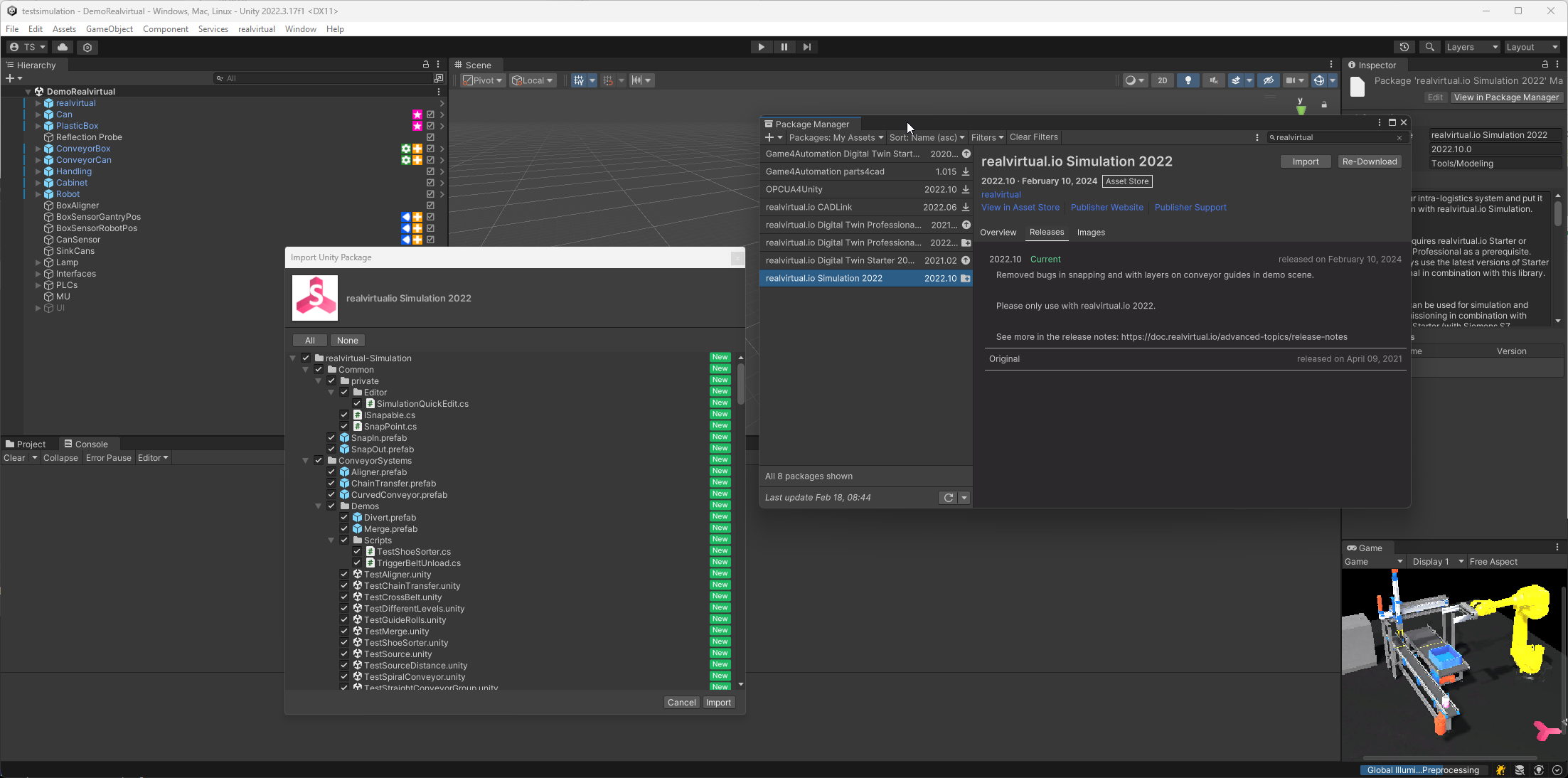
Maybe you did not updated (downloaded the new package of 2022.10) in the package manager (Update Button in the top right corner of Pakackage manager). After Update you need to Import.
Best regards
Thomas
Customer support service by UserEcho
