Teilen Sie Ihre Erfahrunge und Wünsche mit uns und anderen Usern!

 S7 Interface 100% CPU when no connection to PLC is available
S7 Interface 100% CPU when no connection to PLC is available
How can we prevent a 100% CPU usage, when no plc is connected ?
My setup requires PLC to come in and out of the network, and every time the PLC goes out of the network, the CPU reaches 100% within 2 minutes.

Ok will check this afternoon and send you here with a private message a new beta script.
 Pink Module
Pink Module
Dear Sir/Madam,
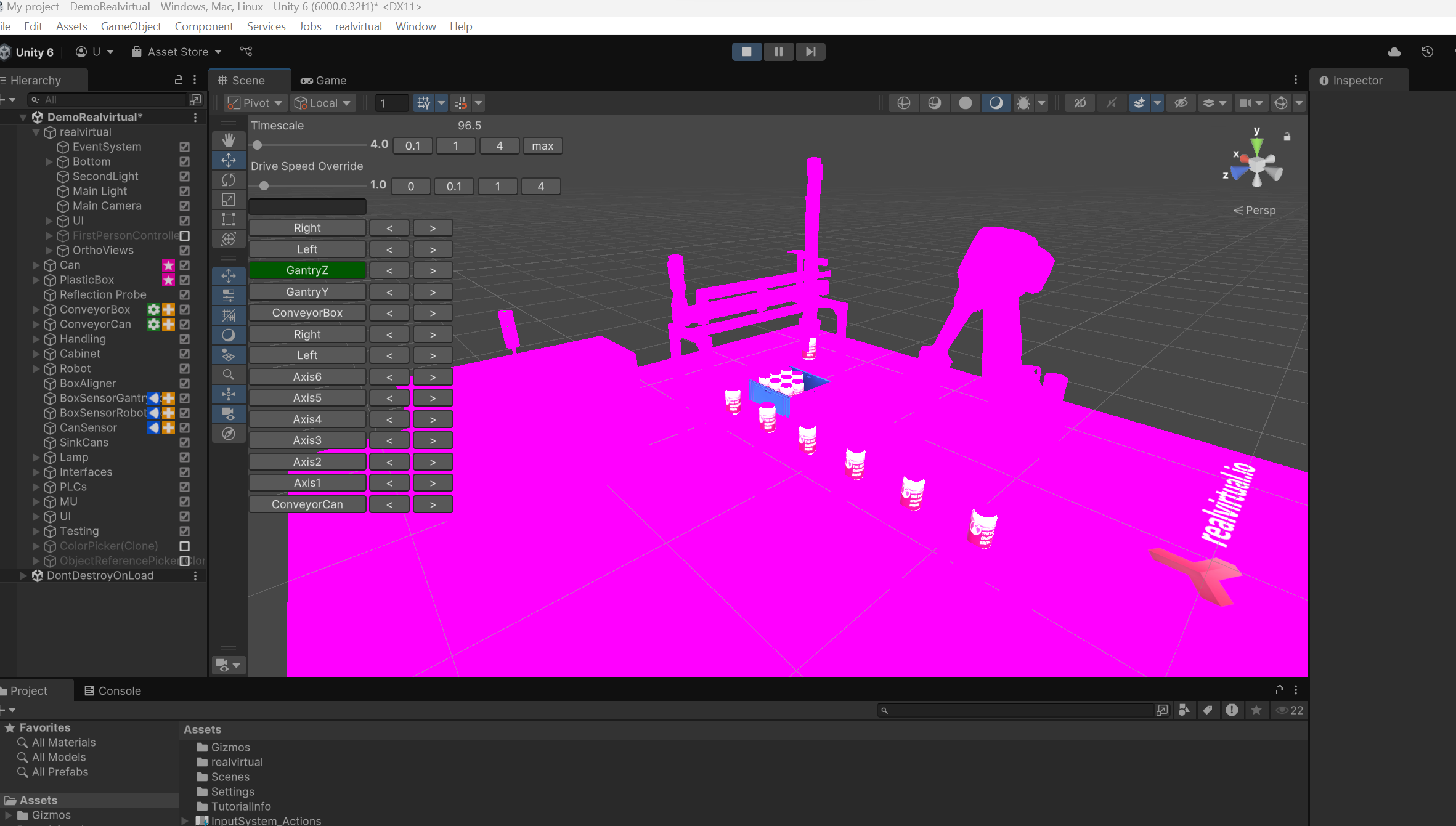
When i open the sample demo and i found the demo has became pink color.
I tried to reinstall the unity and it is still the same.
Can you help to advice on it? Thanks
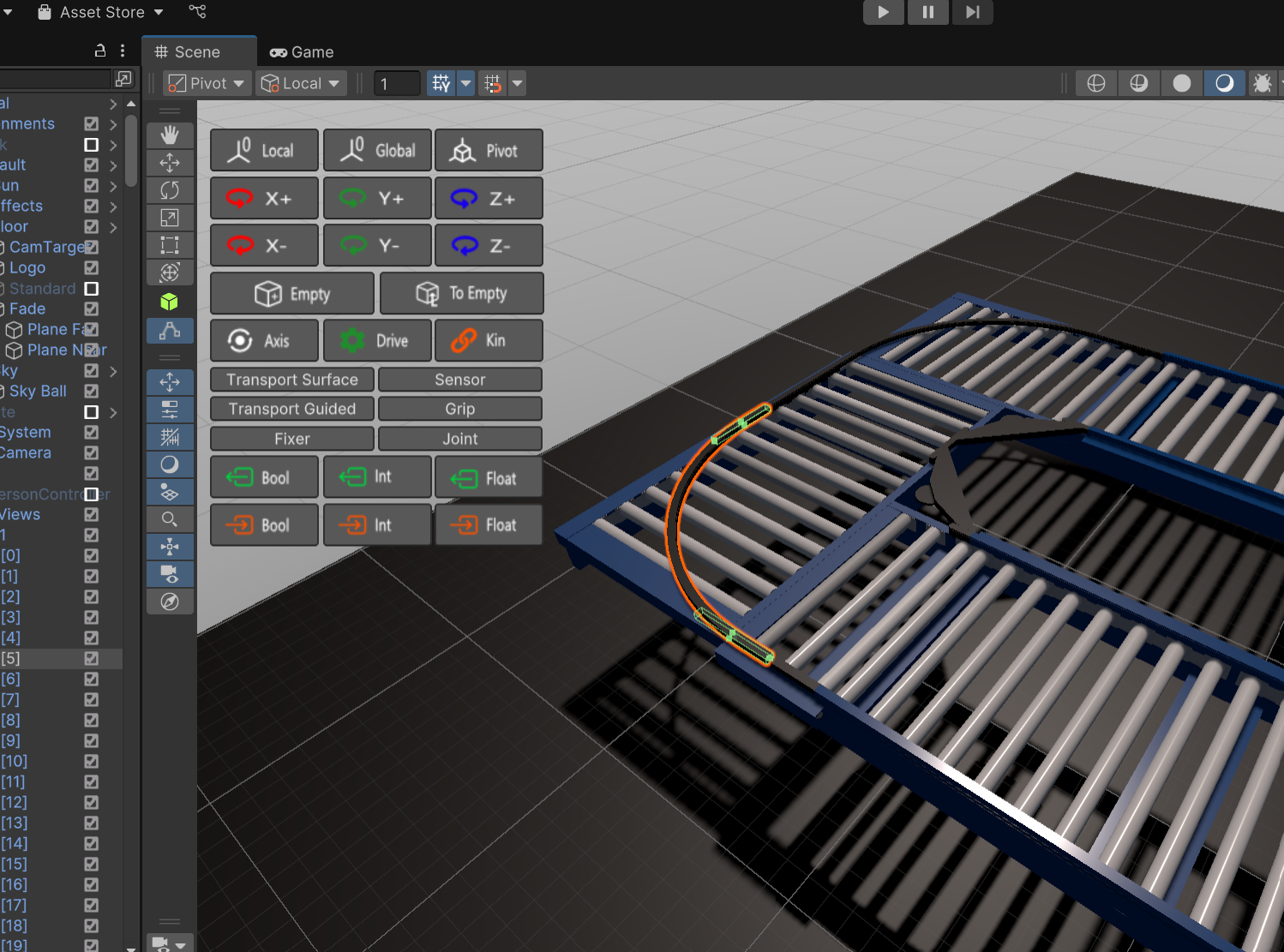
 Add Box Collider on on curve safeguard
Add Box Collider on on curve safeguard
Hi there,
May I know how do i add box collider on a curve safeguard so that i can ensure my carton box move within the conveyor?
Thanks.
VR Headset and HMI
Hello, I have a question: Is it possible to display the HMI components on a VR headset with XR Origin?
Hi, this is possible but you might need to do changes in Unity canvas or other things. All we do is source code open so you can adopt it to your needs.
Working with Offsets
Hello Realvirtual.io Team,
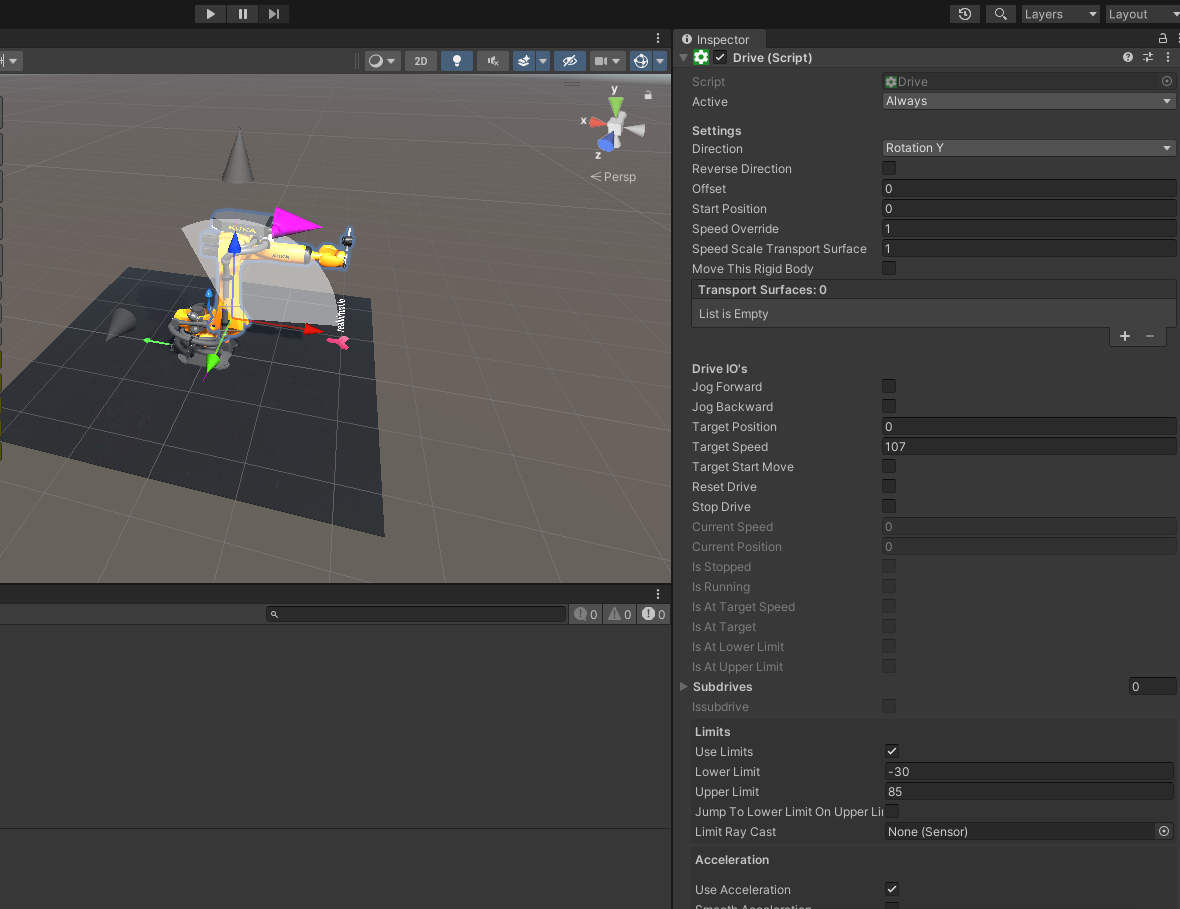
in the robot configuration I deviate by -90 deg. on the Axis 2 and +90 deg. on Axis 3. Intuitively I tried to configure this with an offset, but as soon I try to calculate the inverse kinematics again and do path planning, things don't work as expected.
Range Axis2: -120; -5
When I add the offset of axis 2 by hand (lower limit: -30; upper limit: 85) then things work as expected, but since the robot will be connected via OPCUA Plugin, I don't know how to add the offset otherwise.
Robot: Kuka KR2700 prime
Thank you for your help!
Hi, the "home" position (=position in Editor Mode) for our IK must be always this
Otherwise the IK will not work.
Ideally this would be also the OPCUA Positions where each drive has Position 0. If not you can work with Offsets in the Drives. But youh should only use Offsets for OPCUA and not for our included inverse kinematics.
Maybe it is best to define two robots. One using our IK with the correct settings and one getting the Axis values over OPCUA.
If you thing that our IK is doing something wrong (your last picture) - please send us your project where we can check this to: https://realvirtual.io/send
Please only include what we really need and set the scene to a situation where we can see directly your problem.

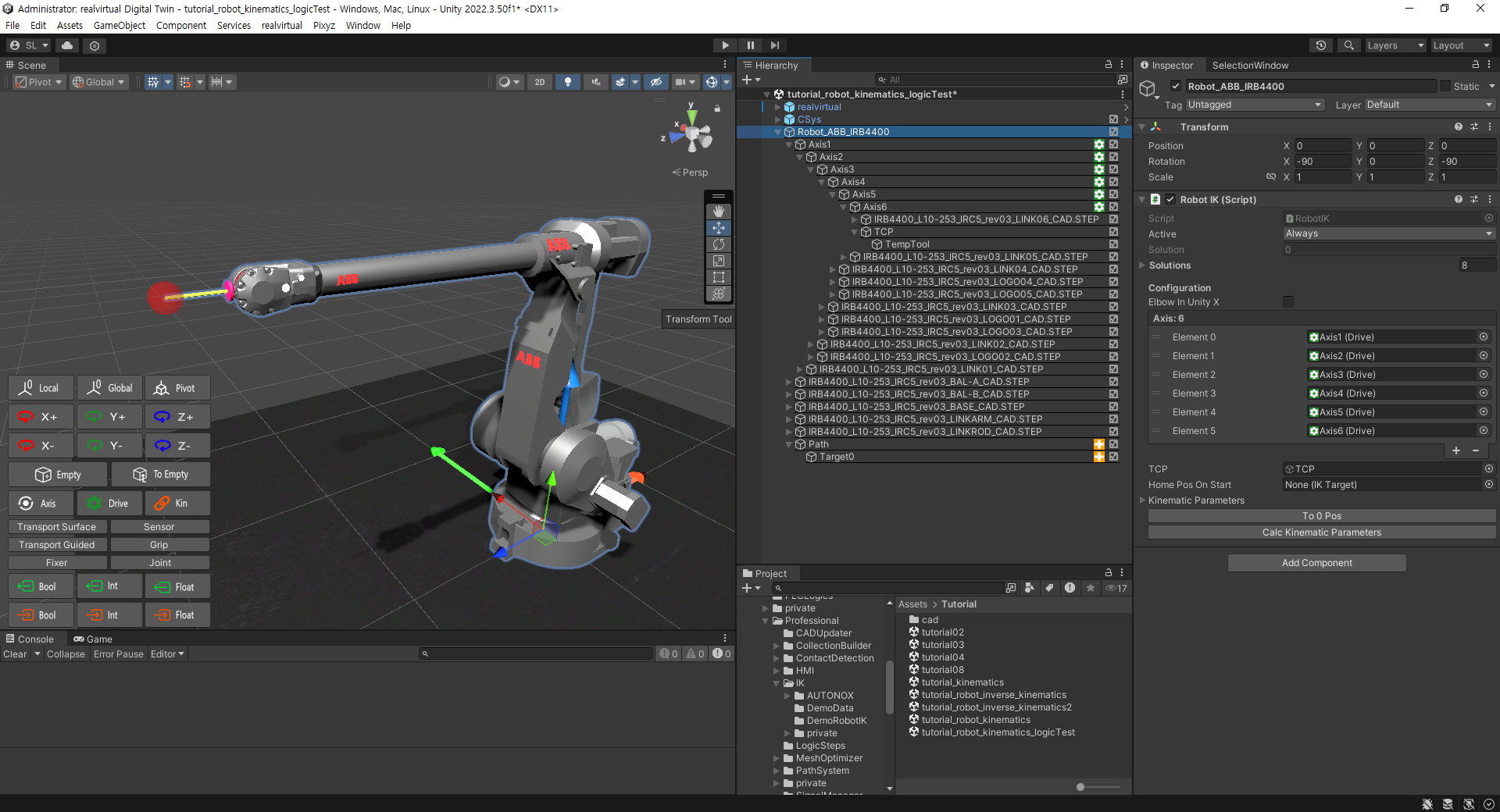
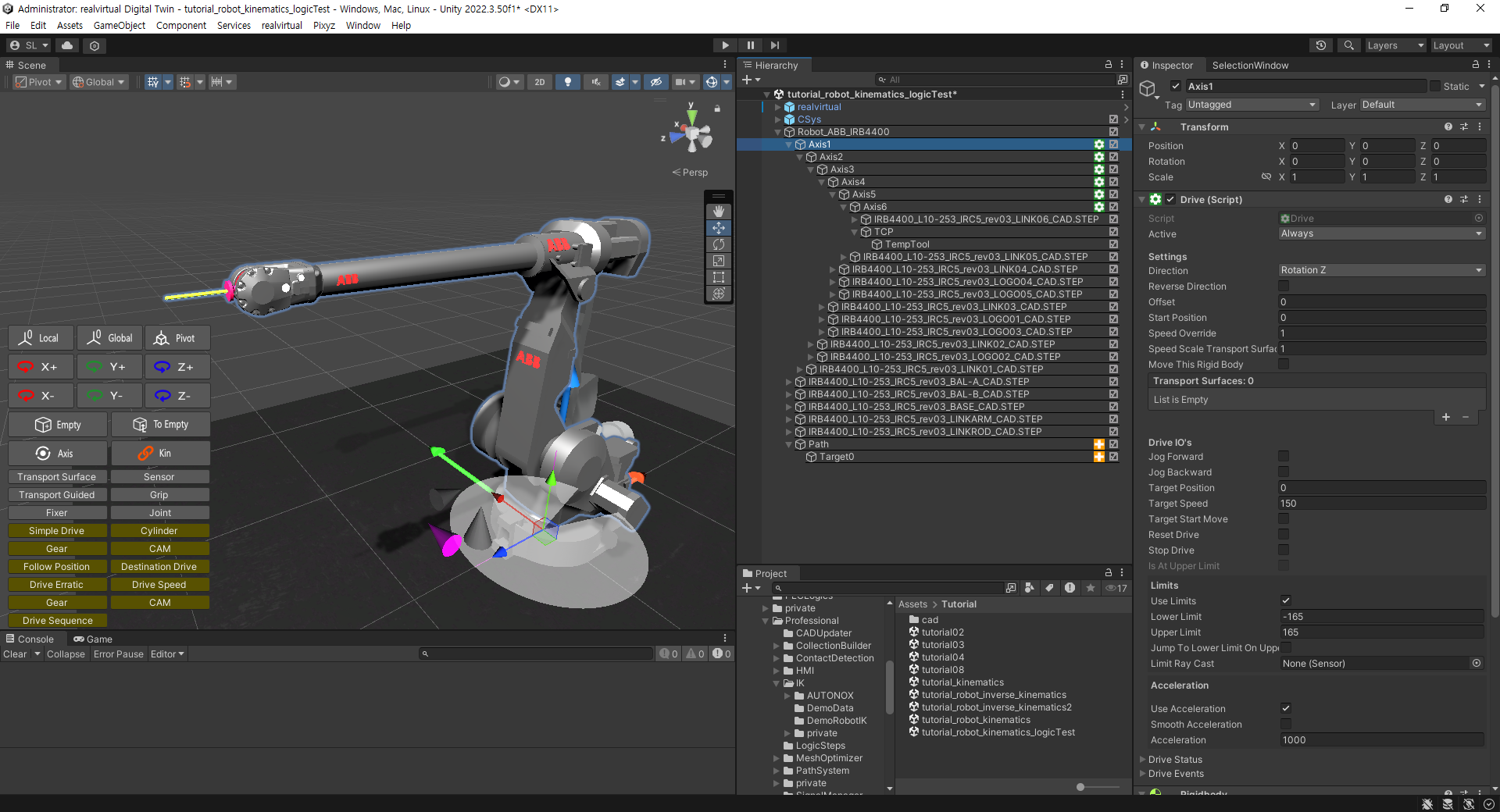
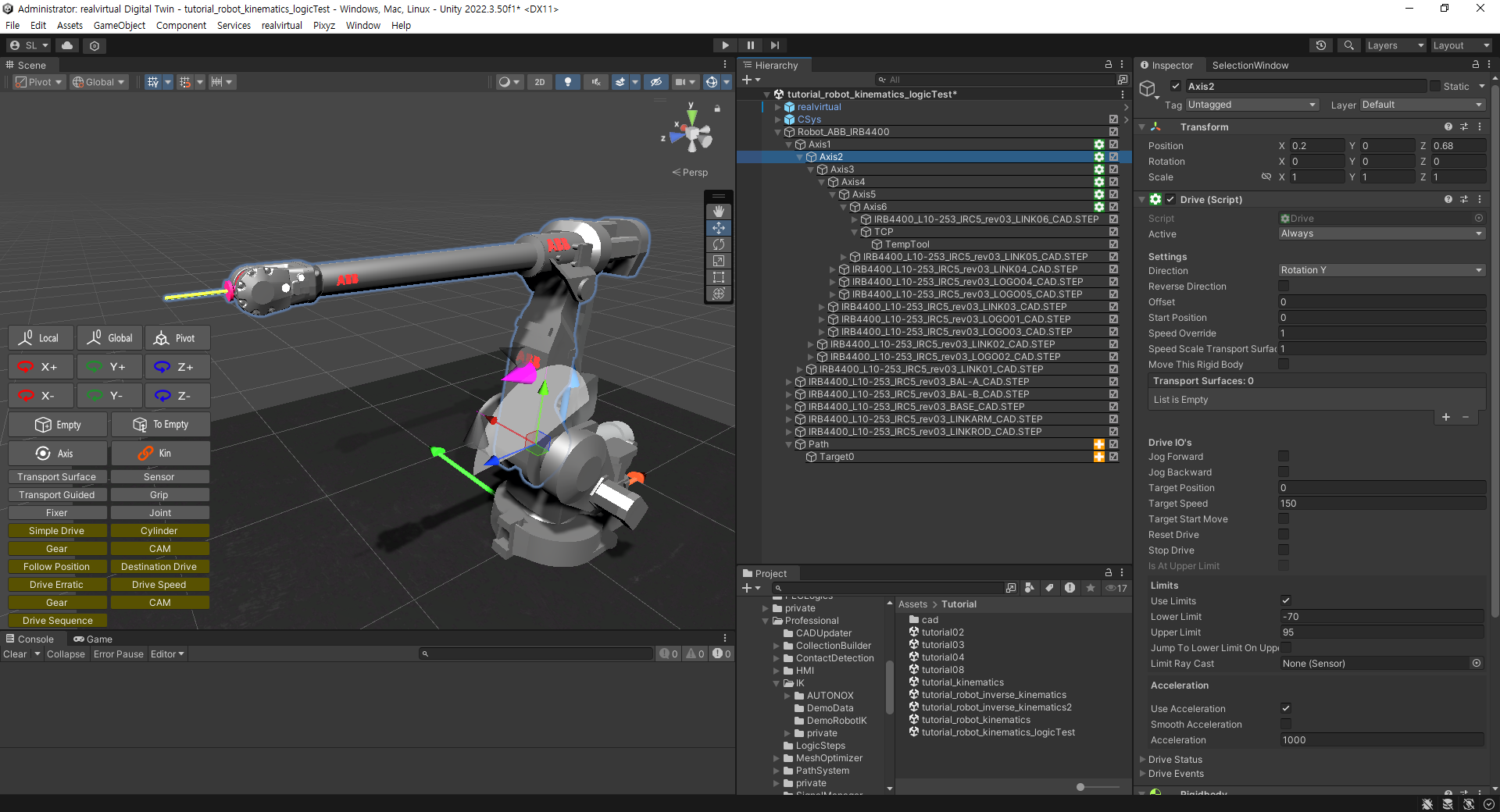
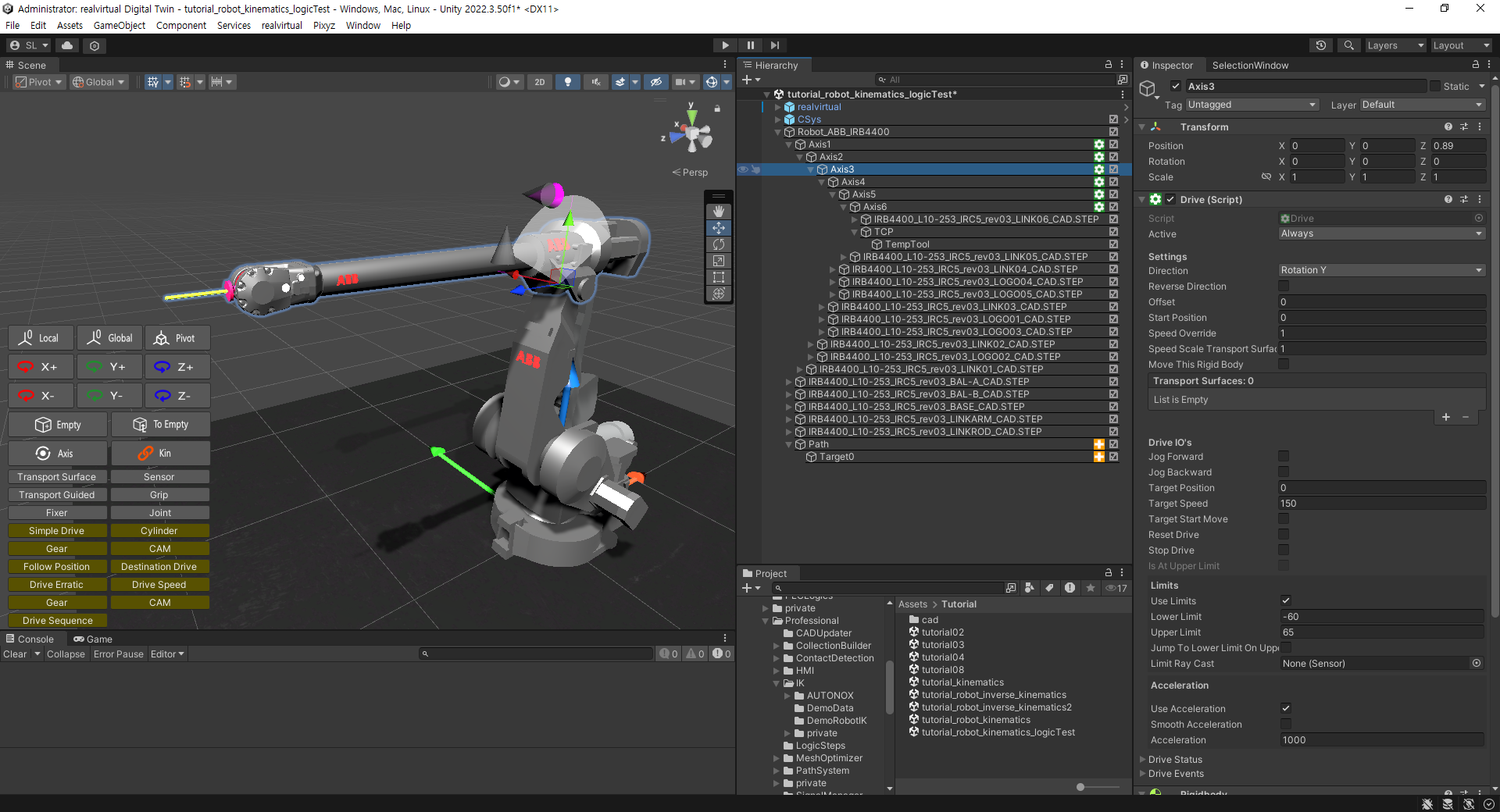
Robot IK Path (Target 0) Program - Not reachable
Hello. Realvirtual team.
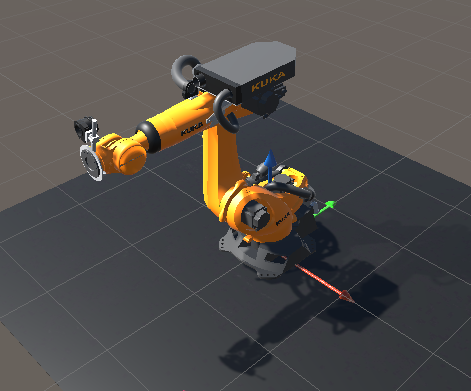
I created a Robot IK Path (Target 0) while learning Robot IK following the realvirtual professional tutorial,
but I have a question because IK cannot reach the Target 0.
I used the "ABB IRB4400" Robot model and performed the following tasks.
1) Robot 6-axis configuration and Drive settings
2) Robot TCP configuration
3) Add Robot IK component and then 6-axis and TCP settings
4) Path creation and then IK Path component
→ When I tried Add new Target, it said it cannot be reached. (It is clearly an area that can be reached.)
→ I also tried moving the Target here and there, but the robot does not follow at all.
Can you guide me on where I made a mistake and caused this situation?
Thanks.
Best regards,
Seokhyun Lee
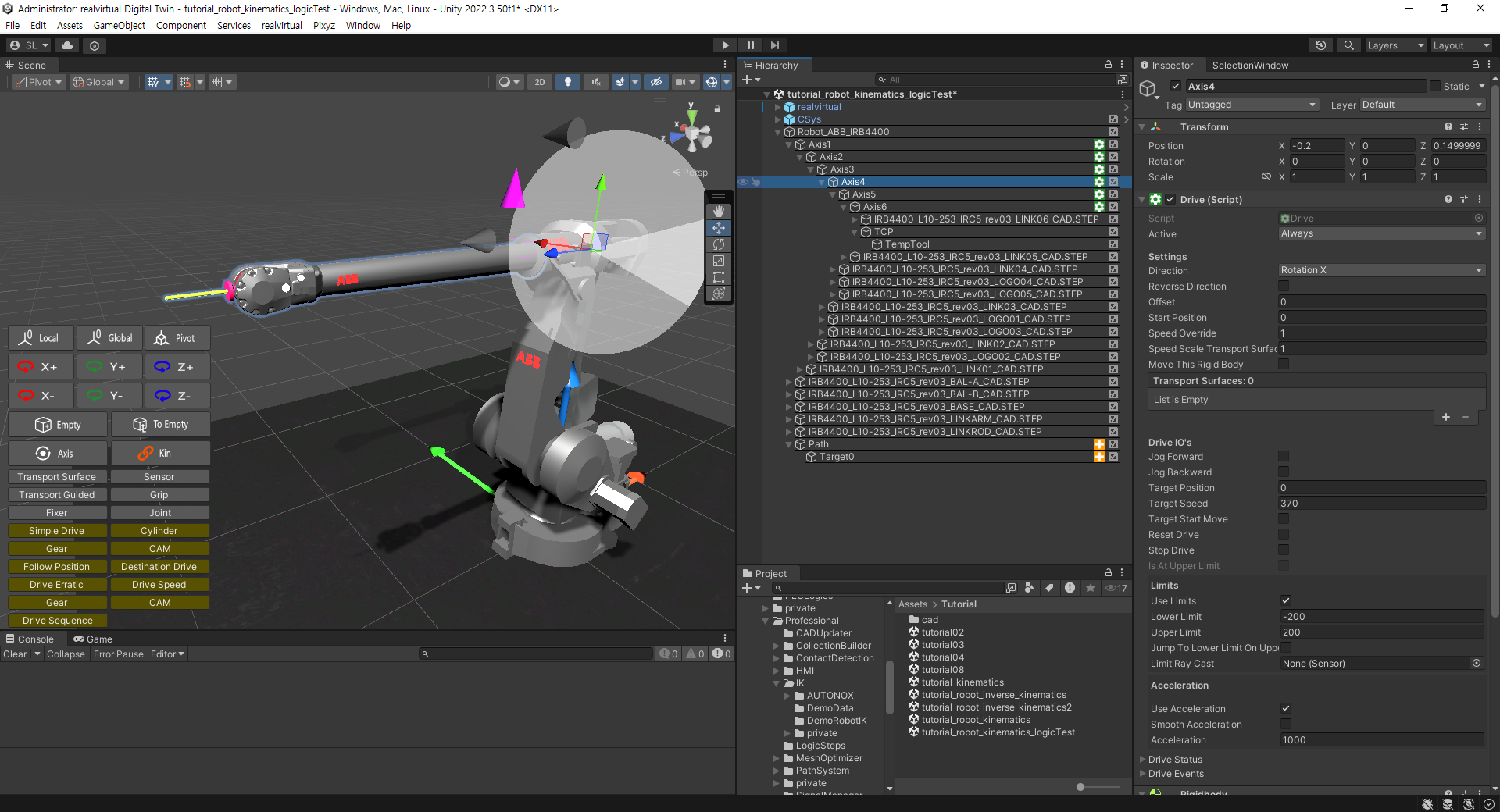
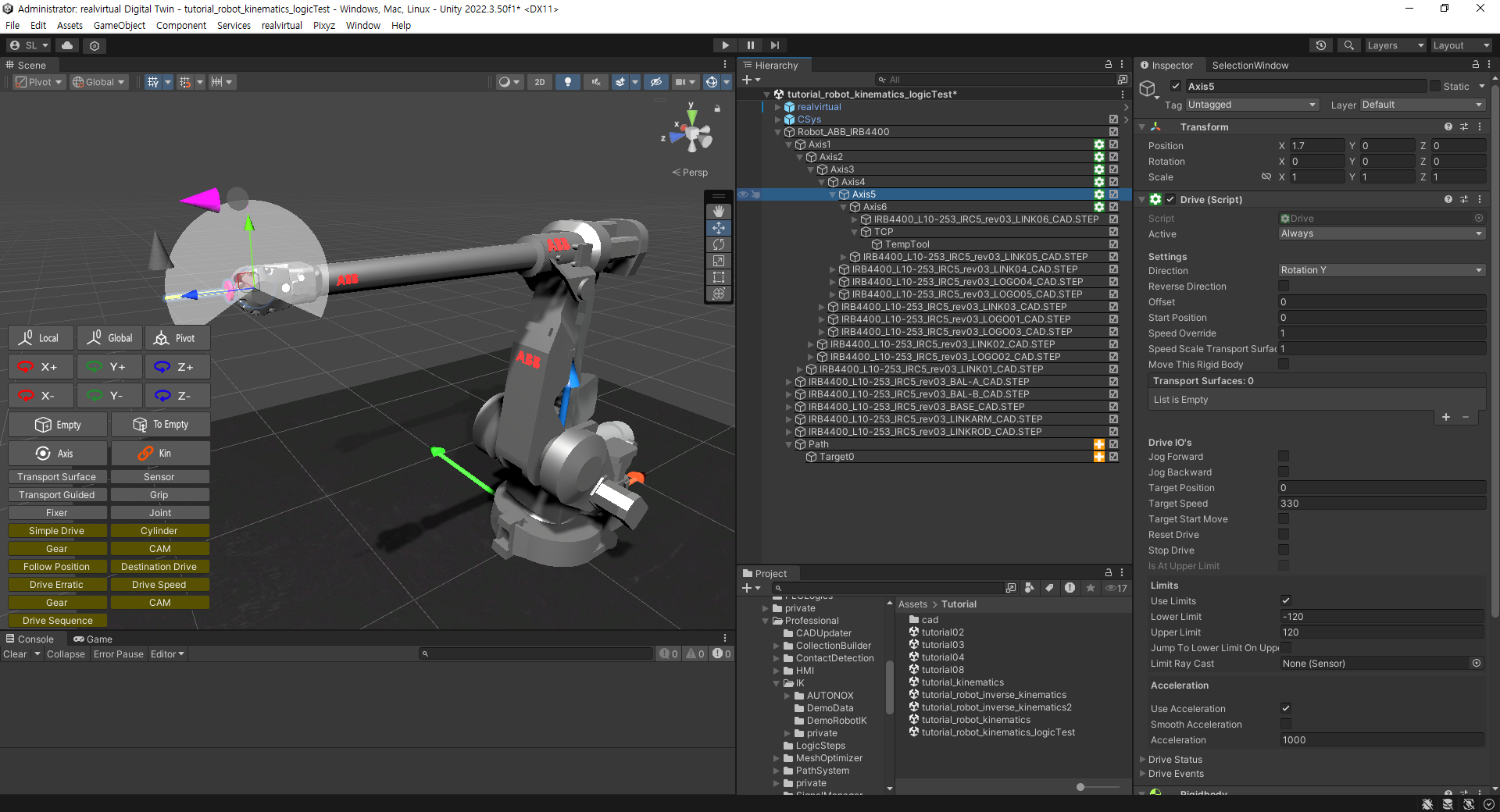
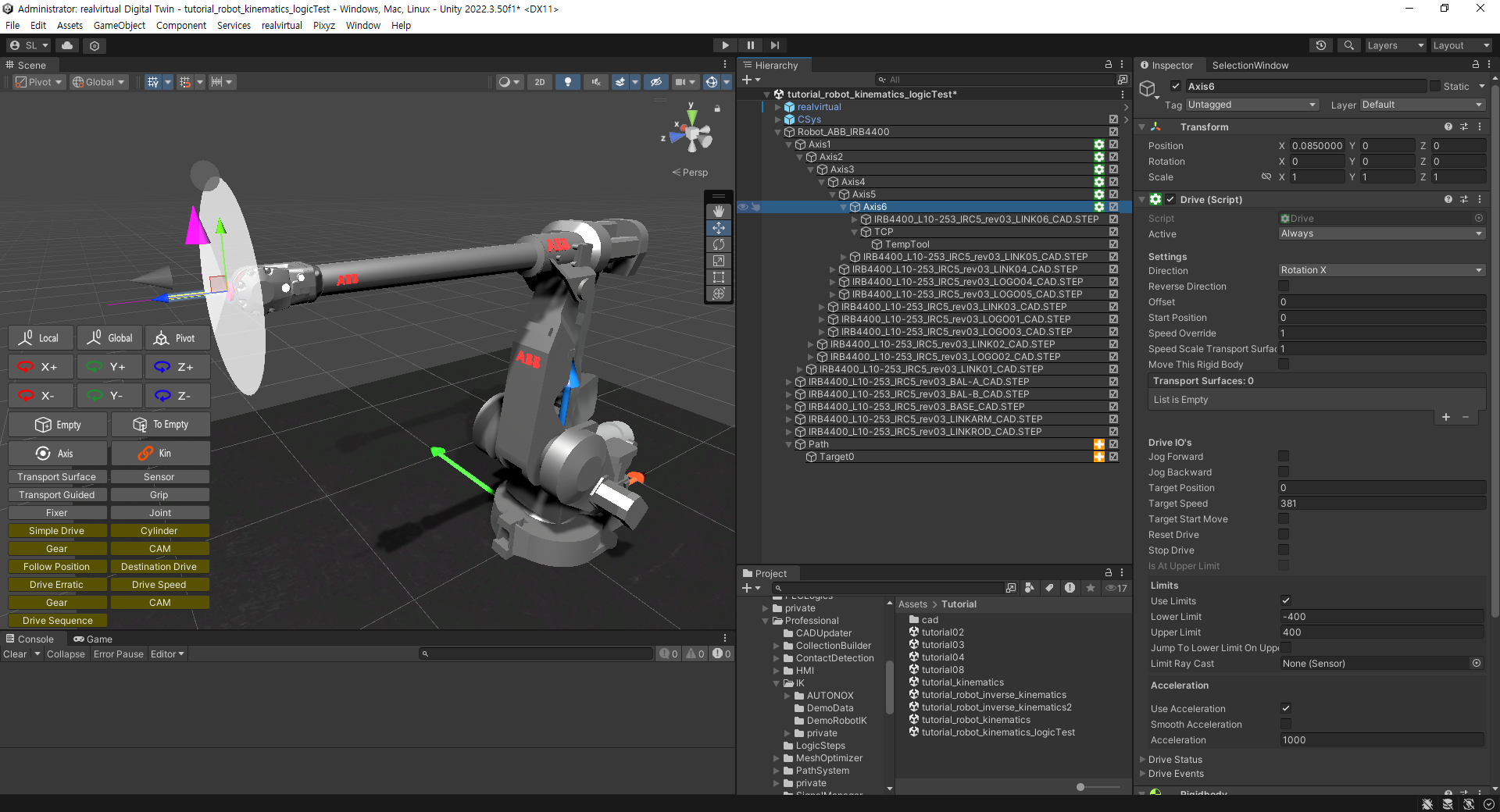
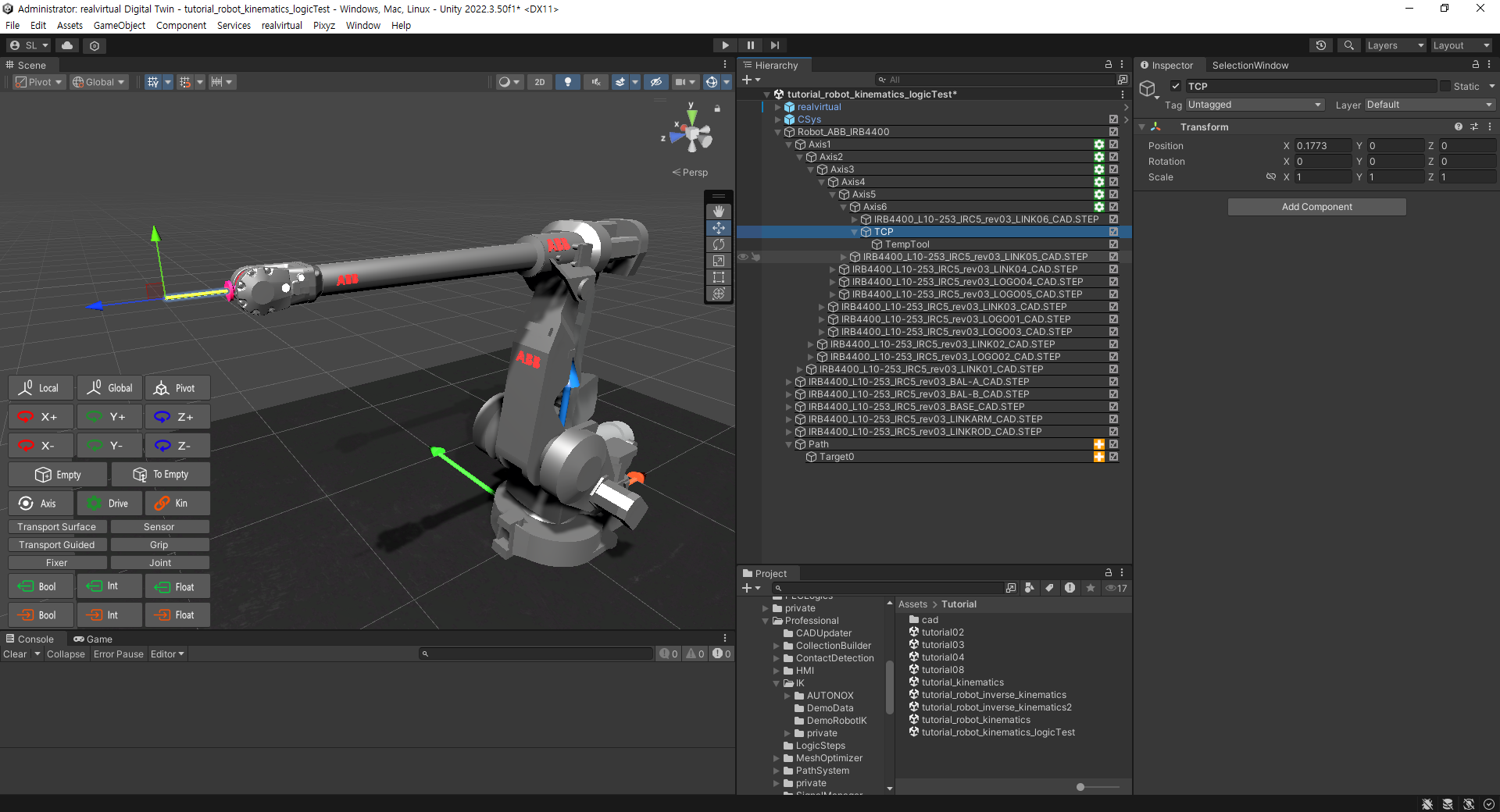
※ Problem Situation (Capture)
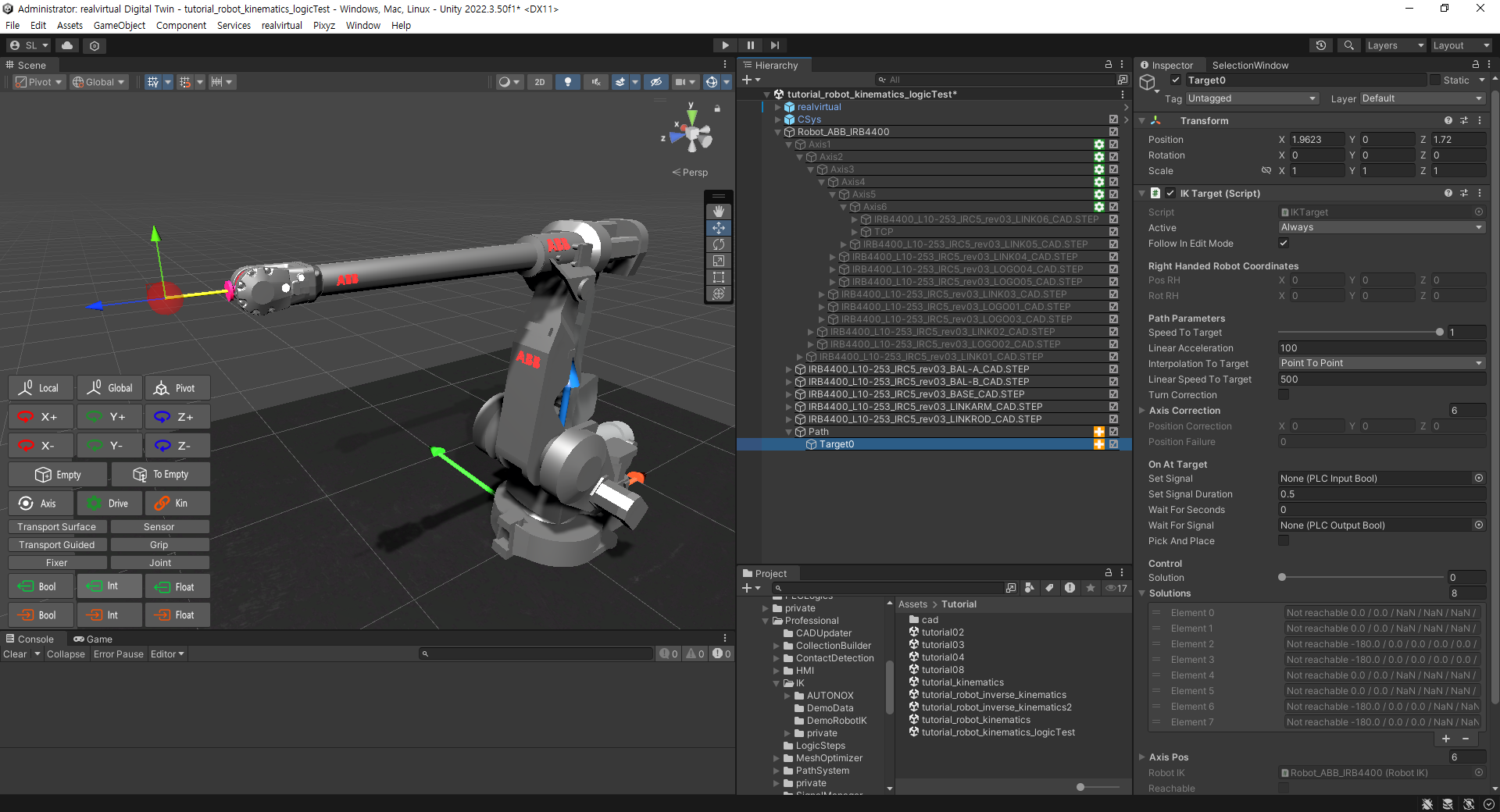
※ Robot Setting (Capture)

Sensor.cs - Problem in OnTriggerExit
Hello realvirtual team,
on working with the sensor component I encountered an issue in the OnTriggerExit event.
I use the sensor event "EventExit" to trigger logic in my own scripts.
In my application I have a sensor on a MU and this MU stands on a conveyor.
When the MU leaves the conveyor I want to invoke an event in a seperate script.
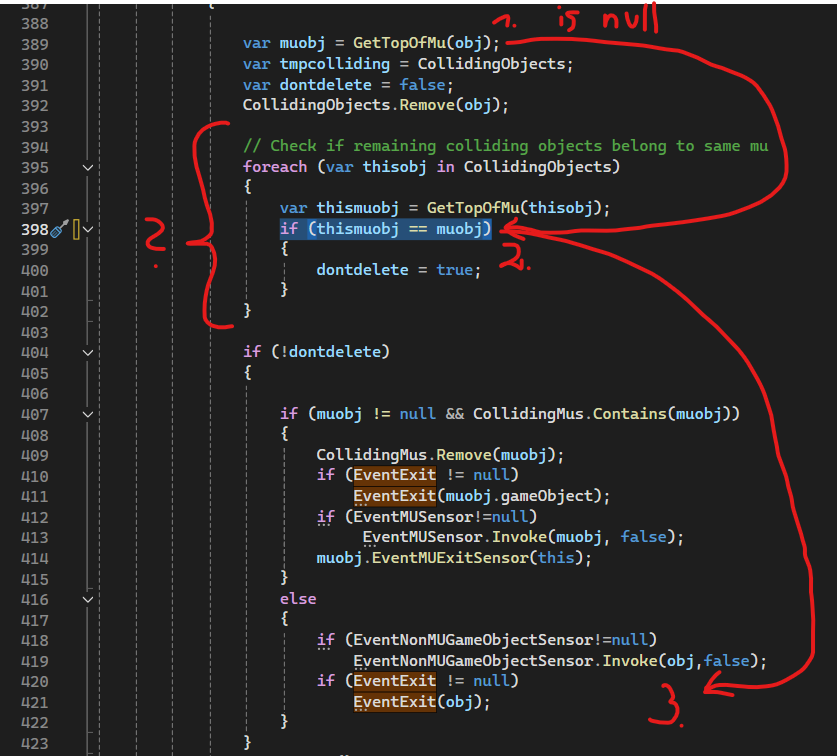
The problem is that the conveyor is not a MU and therefore "muobj" is null. This is correct.
But because of that the statement "if (thismuobj == muobj)" gets true (both is "null") and the EventExit is not getting invoked.
I am not exactly sure why the foreach statement is necessary.
I changed the codeline 398 to this: (so the EventExit is getting invoked)

Please check if this change is a problem in other cases. Maybe you can implement it in the next update.
Thank you very much.
Best regards,
Andreas
Hello,
the "OnExit" event of the sensor is triggered when a MU exits the sensor. If I understand correctly, you’ve attached the sensor as a component of the MU. In that case, it won’t work as intended.
We won’t be changing this in the release because the for-each loops account for the fact that a single MU can consist of multiple colliders, which the sensor may detect.
I recommend the following approach: place the sensor as a standalone GameObject at the end of your conveyor and use it to trigger your script.
Alternatively, you could use Unity's standard OnCollisionExit method on your own component attached to your MU.
Best regards
Christin

Force drive to move vertical chain
Hello, is it possible to control chain with "Force Drive"? I need to prepare a device which transport load/MUs on shelves arranged in vertical chain. If there is some load on shelves and drive torque is 0, it will move/fall down according
to gravity. On the oder hand, chain is "balanced" if all shelves are empty and will not move even if torque on drive is 0. Is it possible to simulate such device?
Hi,
the current chain only functions with the drive component set to “virtual,” as configured in the sample scene. Using this setup, you should be able to build your device, and Unity physics should operate correctly in this case.
Transport surface rotation axle moved from the centre
Hello, I've been testing demo scene "MovingTransportSurface". As it is mentioned in the documentation "If the parent drive of the transport surface is rotating, the pivot points (centre of rotation) of both objects must be in the same position for the movement to be transmitted correctly". It is OK if you need to rotate around axle in the centre of transport surface. But I wondering if it is possible to rotate transport surface around axle which is not in the centre of transport surface. It looks like the pivot of the transport surface must be moved, but is it possible to do this?
Hi,
currently it isn't possible to rotate it off-center. We will work on this for the next release.
Regards Christin
Gripper.cs - Bug with 'grippedonclosing'
Hello,
I am trying out the Gripper.cs component and faced a problem with the variable 'grippedonclosing'
After gripping a MU this variable gets set but reset is missing. This leads to the problem that the gripper keeps closing only to the last grippedonclosing position even if no MU is available.
I added this one code line:

Best regards,
Andreas
Hi,
thank you for reporting this issue. We will fix this in the next release.
Best regards
Christin
Customer support service by UserEcho
