Teilen Sie Ihre Erfahrunge und Wünsche mit uns und anderen Usern!

 OPC UA PLC RECONNECT
OPC UA PLC RECONNECT
If the PLC is disconnected, the application hangs/crashes.

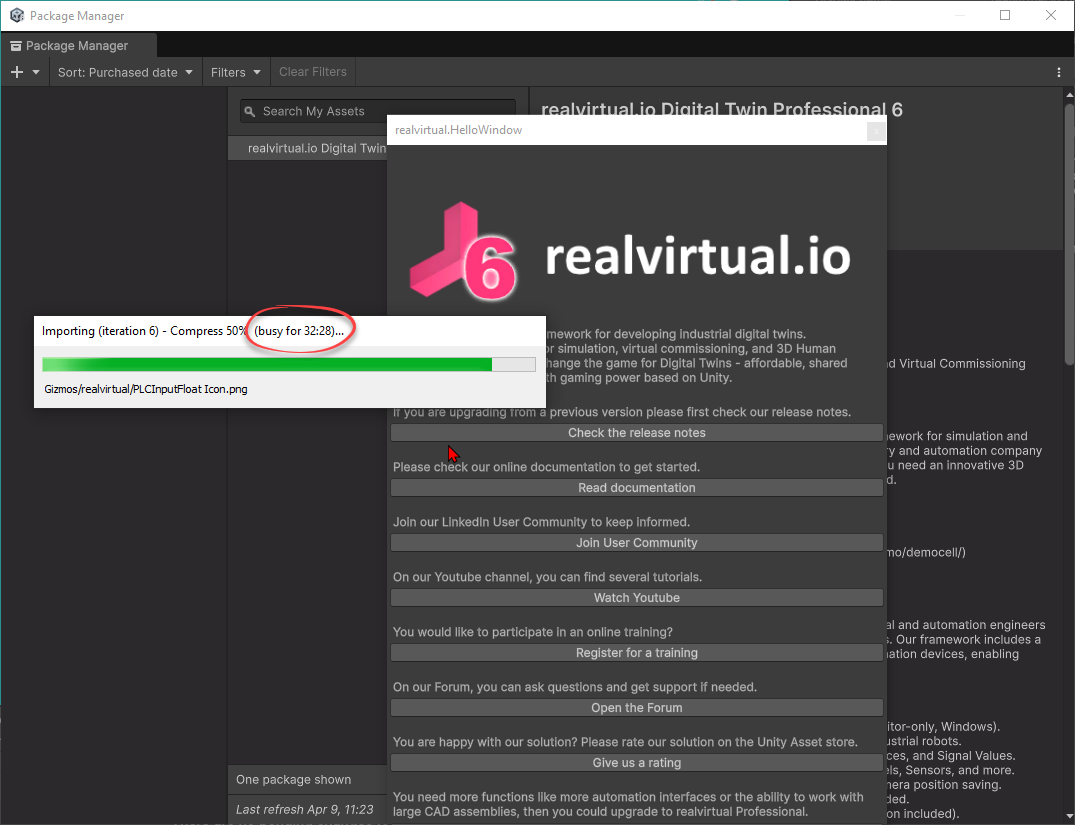
Installation hangs on PLCInputFloat Icon.png
When installing RealVirtual Pro from Package Manager the installation hangs on PLCInputFloat Icon.png when the HelloWindow appears. If I close the HelloWindow the installation continues.
 PLC Input an PLC Output are disabled when pressing play
PLC Input an PLC Output are disabled when pressing play
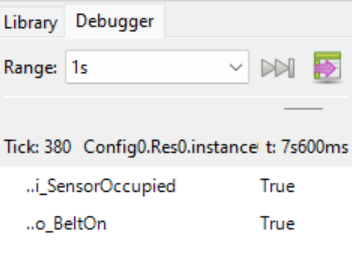
I use RealVirtual starter. I have added the S7Interface to my Unity project. I have created a softplc with OpenPLC with a very simple program
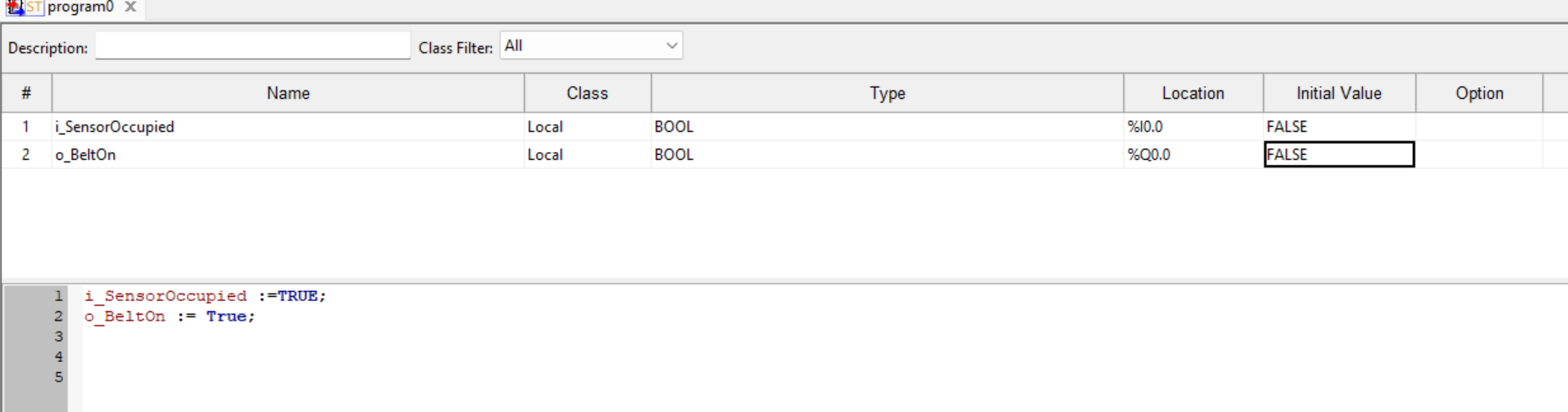
When I run it it works: values become true.
I compiled it to a runtime that also works.
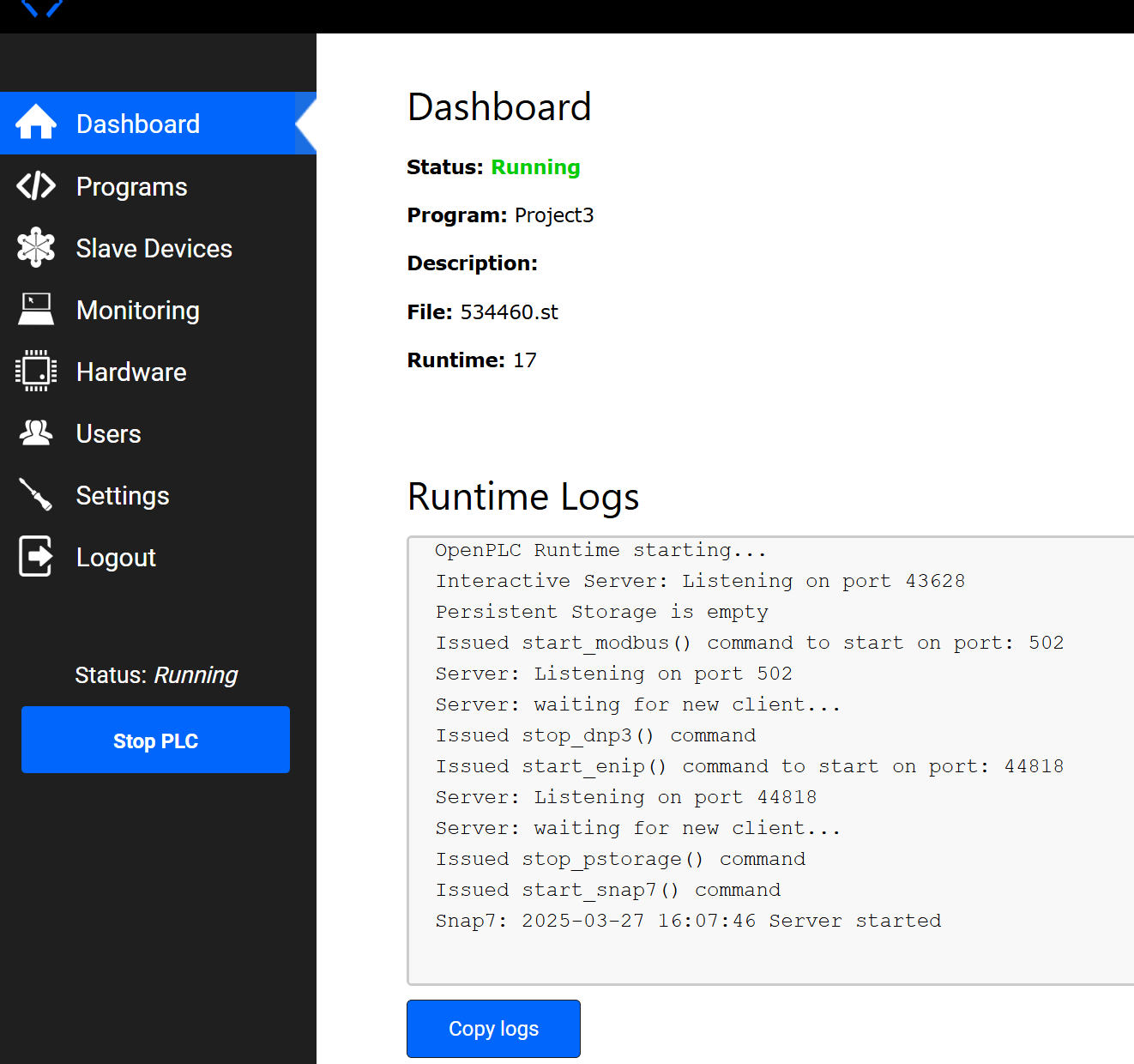
I have switched on S7 protocol for the softPLC
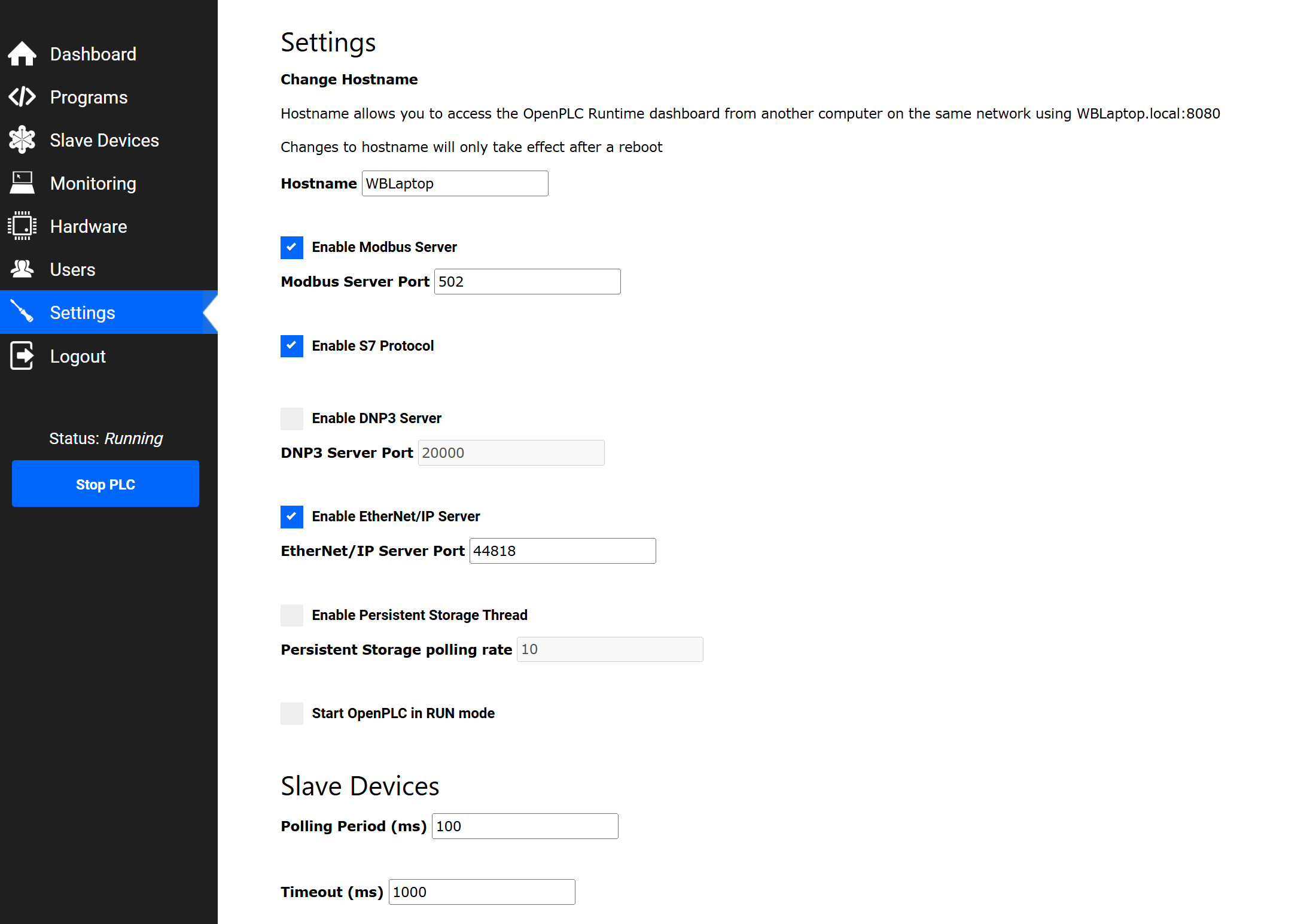
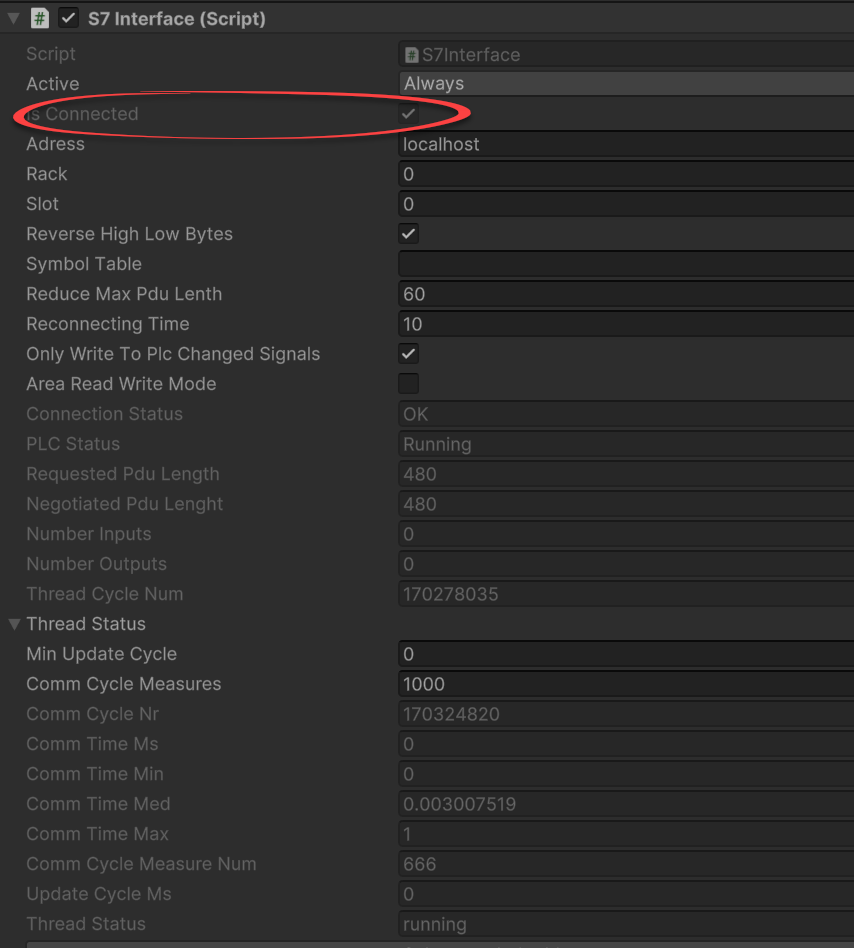
I can connect from Unity to the softplc
I have added the two signals to Unity
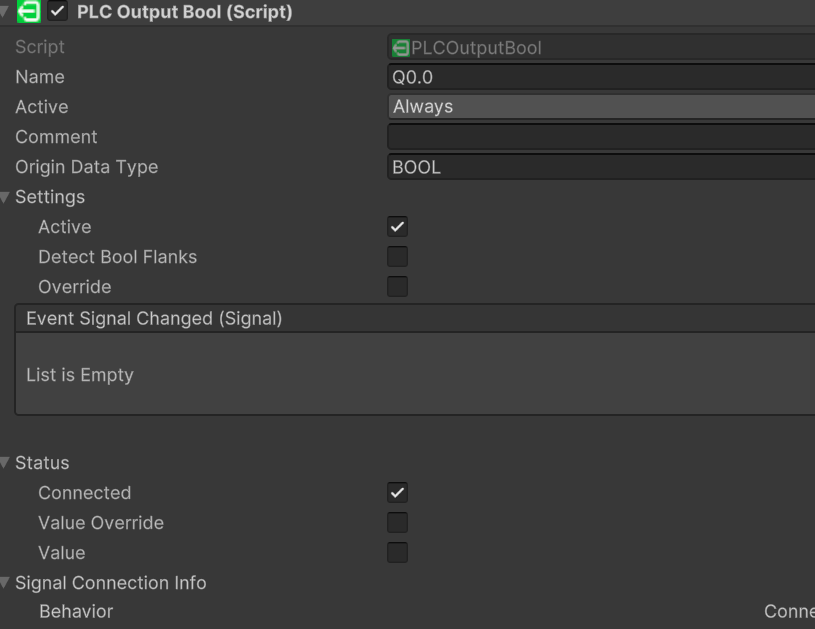
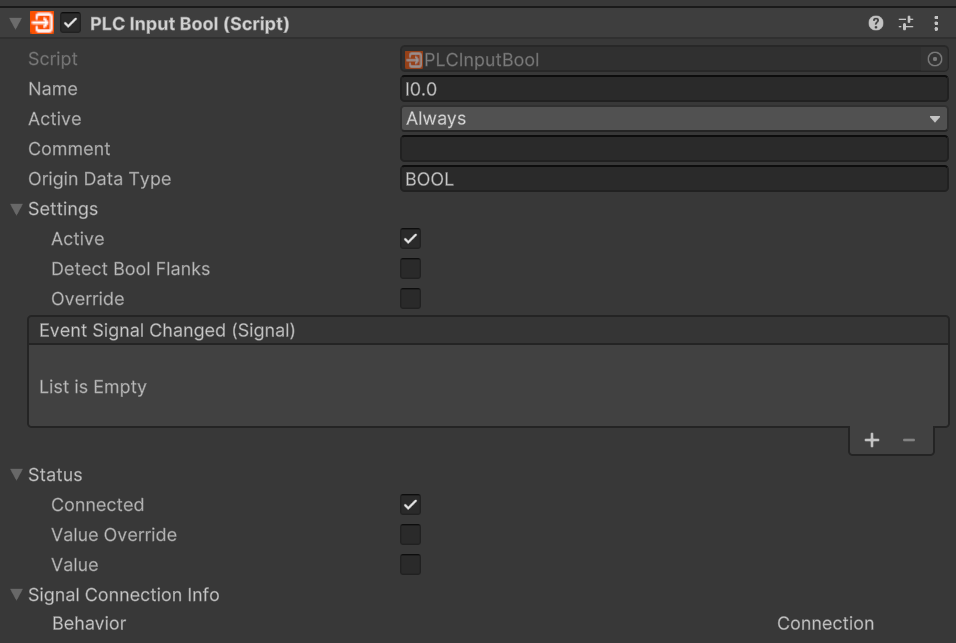
When I press Play in Unity the connection is made to the softPLC butboth PLC scripts are disabled.
Why is this ?
How to tell wether a Path finished?
Hello,
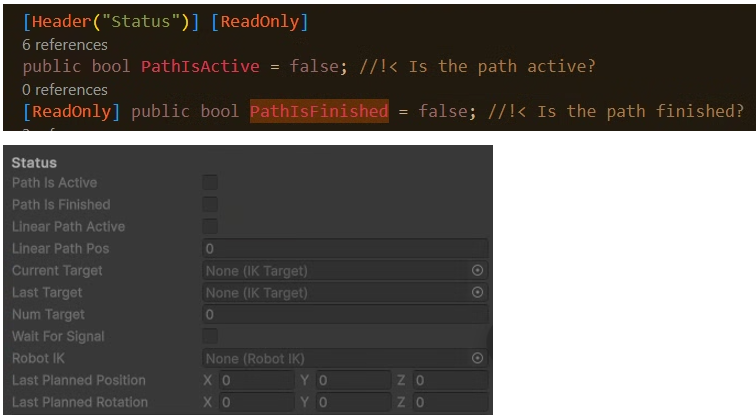
I am currently working on a script that allows me to program linear movement (7th axis) for an IK robot between IKPaths. The script starts a drive destination after a Boolean is set or when a path has finished. After the linear movement, it either sets a signal or starts another path. Everything is working fine, but to check whether an IKPath has finished, I would like to use something like IKPath.PathIsFinished. However, this value does not seem to be set anywhere, even though it appears in the status bar of the IKPath inspector window.
I considered adding a line to the CheckNextTarget function, but ideally, I would prefer not to modify the realVirtual scripts directly:
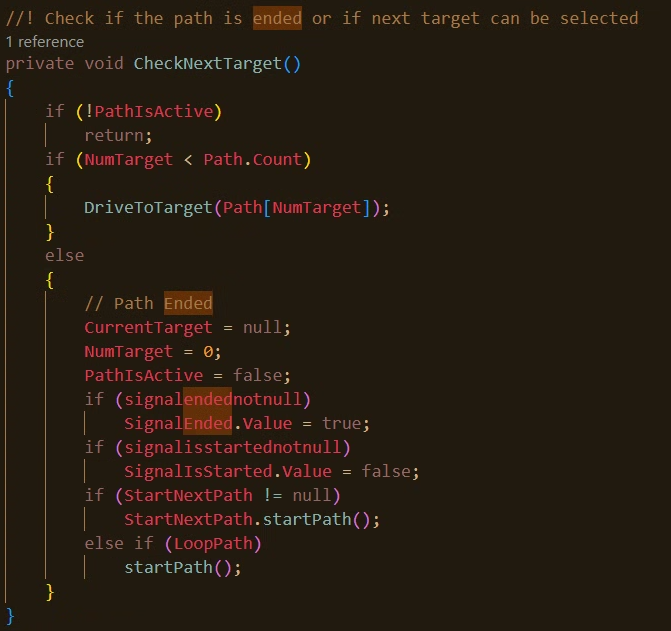
Is this a bug? The value should be set somewhere...
Best regards,
Nico

Guided MUs not rotating on Guided transports in Unity 6

After upgrading to Unity 6 LTS, the MUs are no longer rotating on turn surfaces while following a Guided Transport, however if I go back to unity 2022 it is working as intended, what could be causing this?
S7 Interface 100% CPU when no connection to PLC is available
How can we prevent a 100% CPU usage, when no plc is connected ?
My setup requires PLC to come in and out of the network, and every time the PLC goes out of the network, the CPU reaches 100% within 2 minutes.

Ok will check this afternoon and send you here with a private message a new beta script.
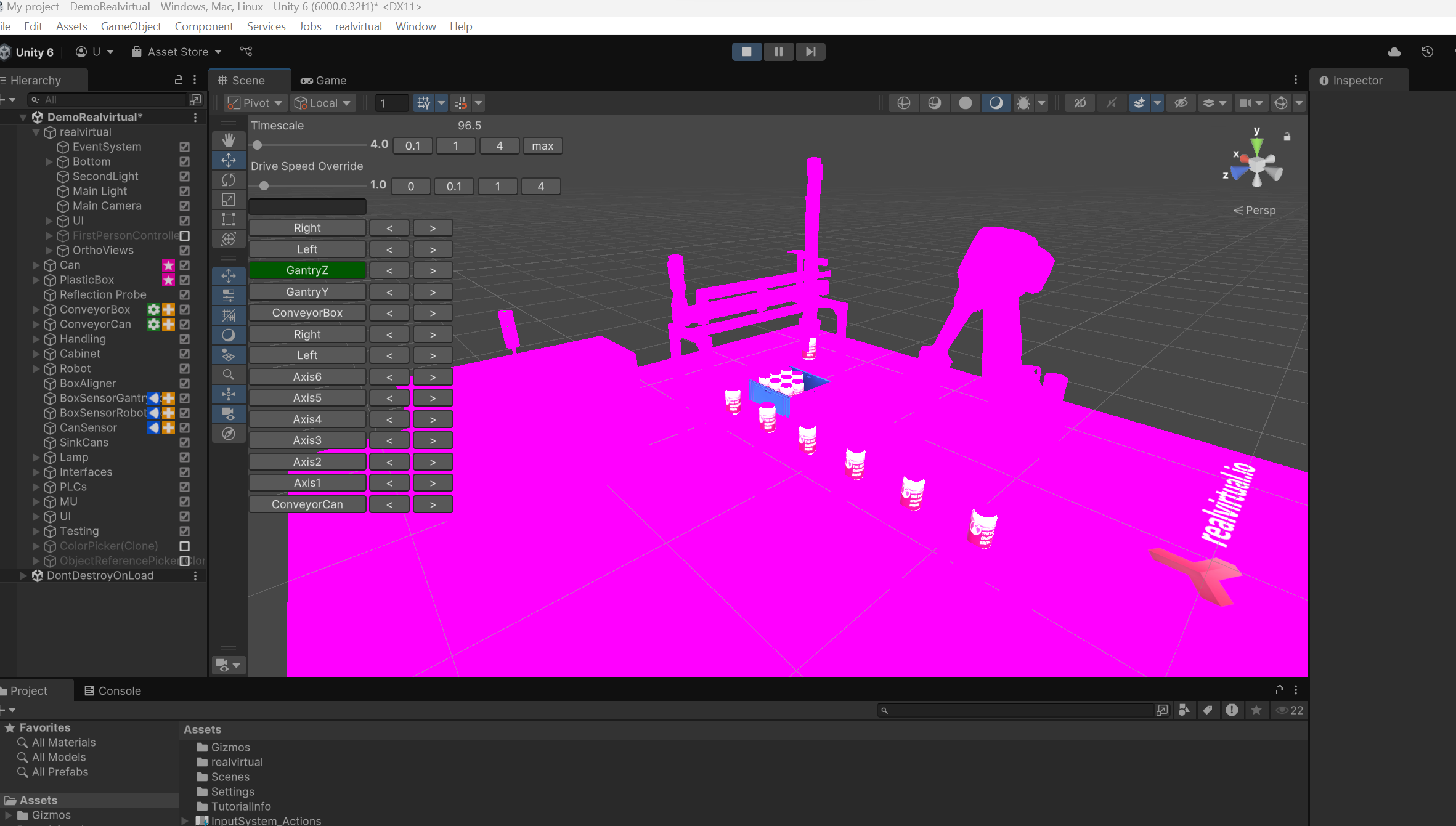
Pink Module
Dear Sir/Madam,
When i open the sample demo and i found the demo has became pink color.
I tried to reinstall the unity and it is still the same.
Can you help to advice on it? Thanks
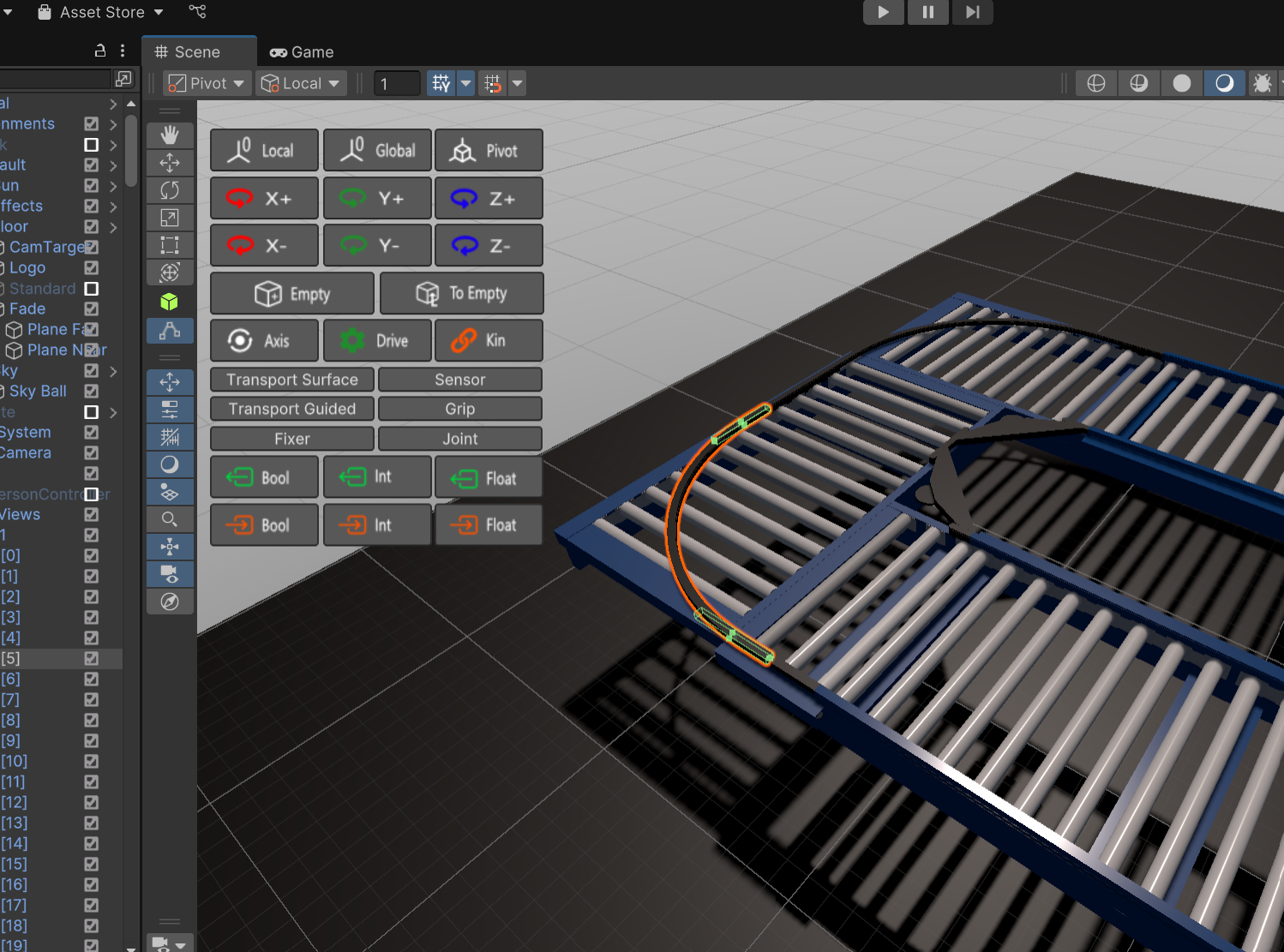
 Add Box Collider on on curve safeguard
Add Box Collider on on curve safeguard
Hi there,
May I know how do i add box collider on a curve safeguard so that i can ensure my carton box move within the conveyor?
Thanks.
VR Headset and HMI
Hello, I have a question: Is it possible to display the HMI components on a VR headset with XR Origin?
Hi, this is possible but you might need to do changes in Unity canvas or other things. All we do is source code open so you can adopt it to your needs.
Working with Offsets
Hello Realvirtual.io Team,
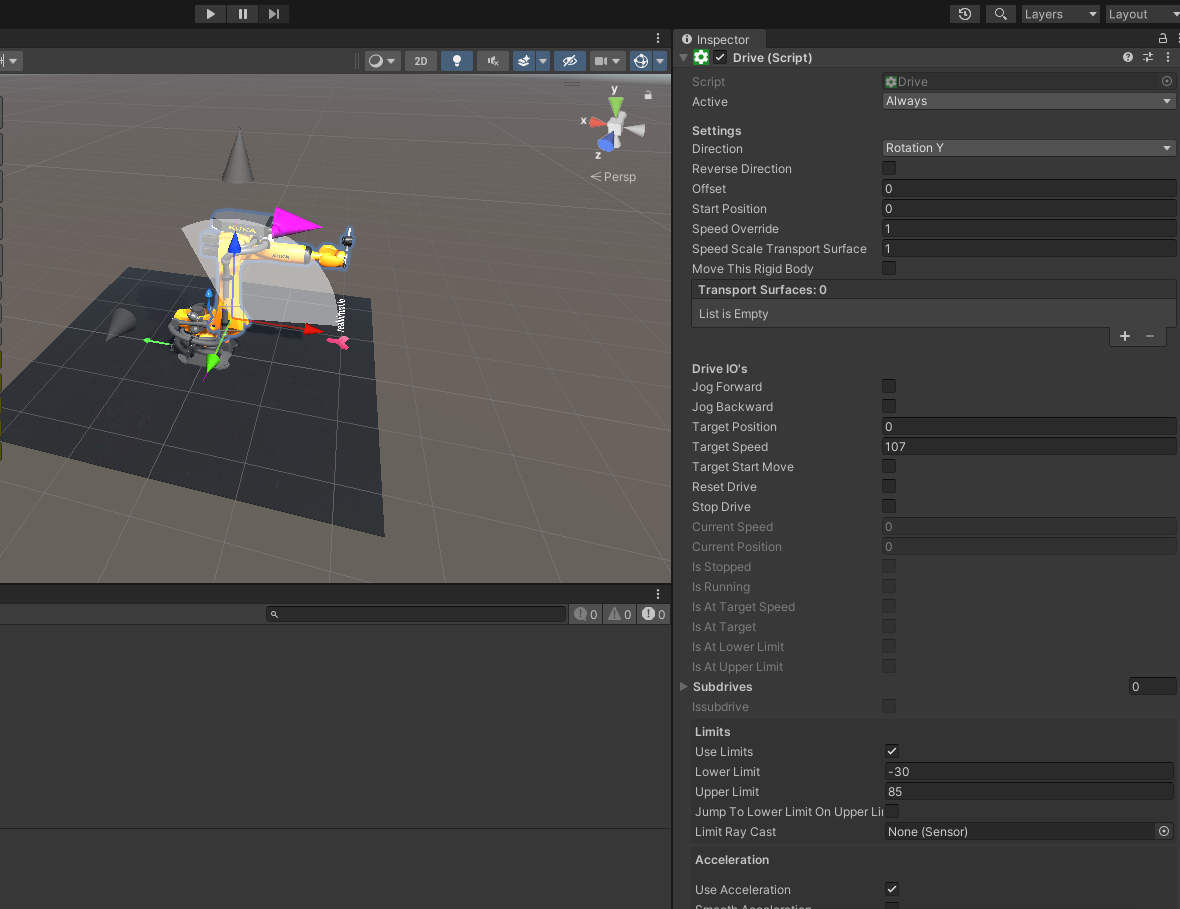
in the robot configuration I deviate by -90 deg. on the Axis 2 and +90 deg. on Axis 3. Intuitively I tried to configure this with an offset, but as soon I try to calculate the inverse kinematics again and do path planning, things don't work as expected.
Range Axis2: -120; -5
When I add the offset of axis 2 by hand (lower limit: -30; upper limit: 85) then things work as expected, but since the robot will be connected via OPCUA Plugin, I don't know how to add the offset otherwise.
Robot: Kuka KR2700 prime
Thank you for your help!
Hi, the "home" position (=position in Editor Mode) for our IK must be always this
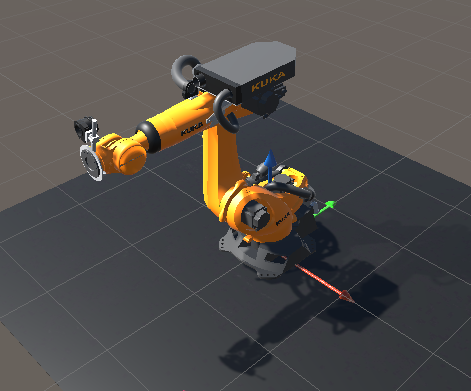
Otherwise the IK will not work.
Ideally this would be also the OPCUA Positions where each drive has Position 0. If not you can work with Offsets in the Drives. But youh should only use Offsets for OPCUA and not for our included inverse kinematics.
Maybe it is best to define two robots. One using our IK with the correct settings and one getting the Axis values over OPCUA.
If you thing that our IK is doing something wrong (your last picture) - please send us your project where we can check this to: https://realvirtual.io/send
Please only include what we really need and set the scene to a situation where we can see directly your problem.
Customer support service by UserEcho
