Teilen Sie Ihre Erfahrunge und Wünsche mit uns und anderen Usern!

 Bag is not moving with RGV
Bag is not moving with RGV
A693 - Windows, Mac, Linux - Unity 2022.3.3....mp4
I want to move the bag which is shown in project with RGV. But unable to do it. When i am giving forward command to RGV, RGV is moving forward but the bag is not moving with RGV. Last time you had shared a link for reference (https://doc.realvirtual.io/components-and-scripts/motion/transportsurface#transport-surfaces-and-unity-physics).
But i couldn't get it. Please suggest the solution step by step.

Problem with Drive with AGX
Using Realvirtual Release 2022.18 Build 5747
I'm trying to enable a drive while using AGX Physics for collisions.
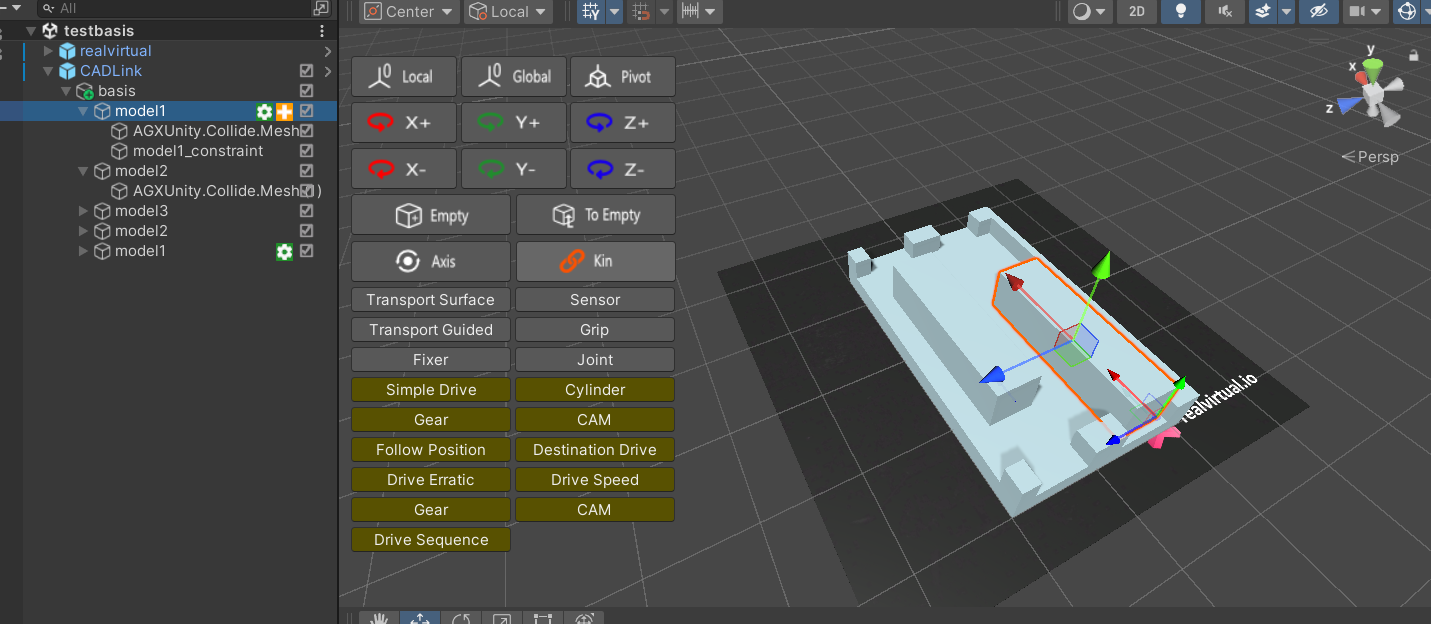
This is the scene I'm using for testing. I'm trying to move the beam on top of the platform and have made colliders in AGX for both. Then I configured a prismatic constraint on the beam through AGX.
Then I followed the instructions of https://doc.realvirtual.io/extensions/agx-physics
I set the lock on of the constraint of the Rigid Body.

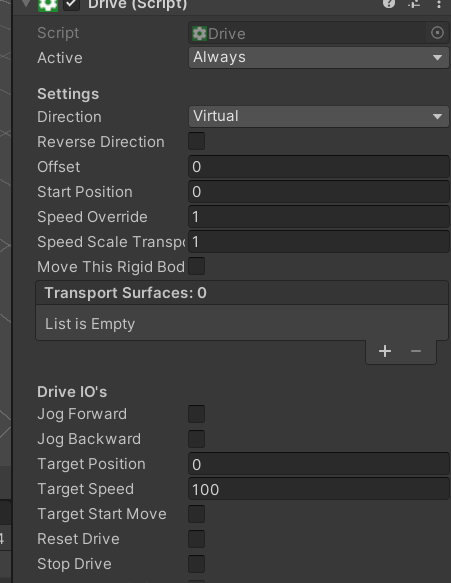
Then I configured the Drive. I put direction on Virtual. Then I added an Erratic Driver.
But when I run the beam doesn't move. Only when I disable the Rigid Body and put the Direction not on virtual the beam moves, but that means disabling AGX Physics. How can I make the beam move while still using AGX?
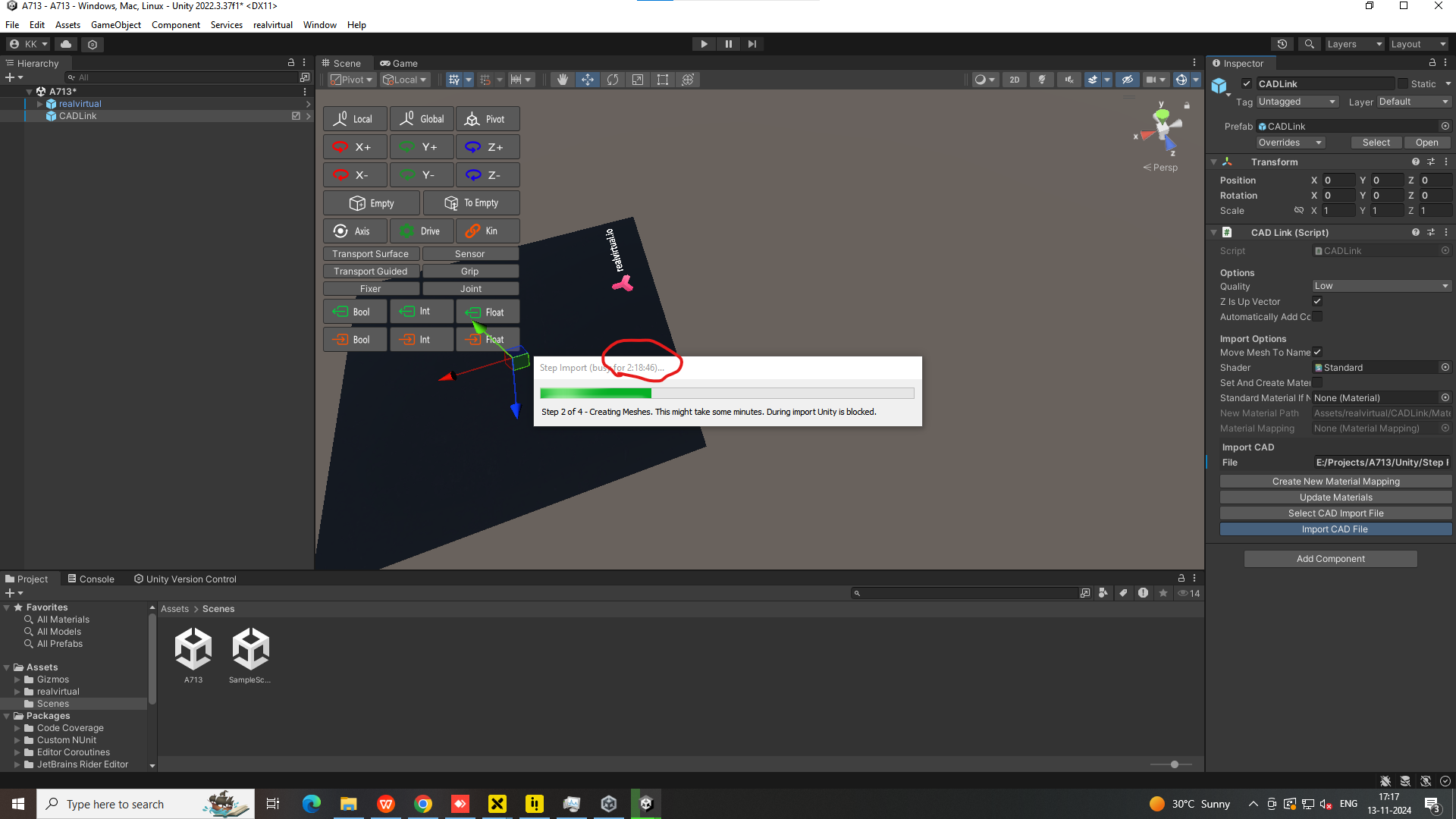

Hi, how long took it in total? Yes our Step file is not always very fast and it could happen that you need to wait more than 15mins for bigger files.
IK problem
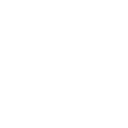
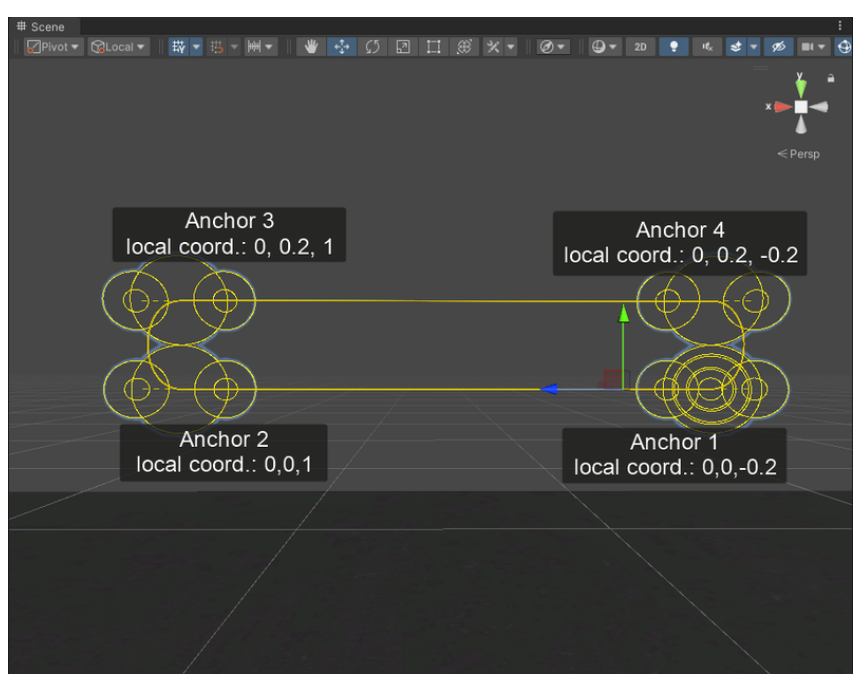
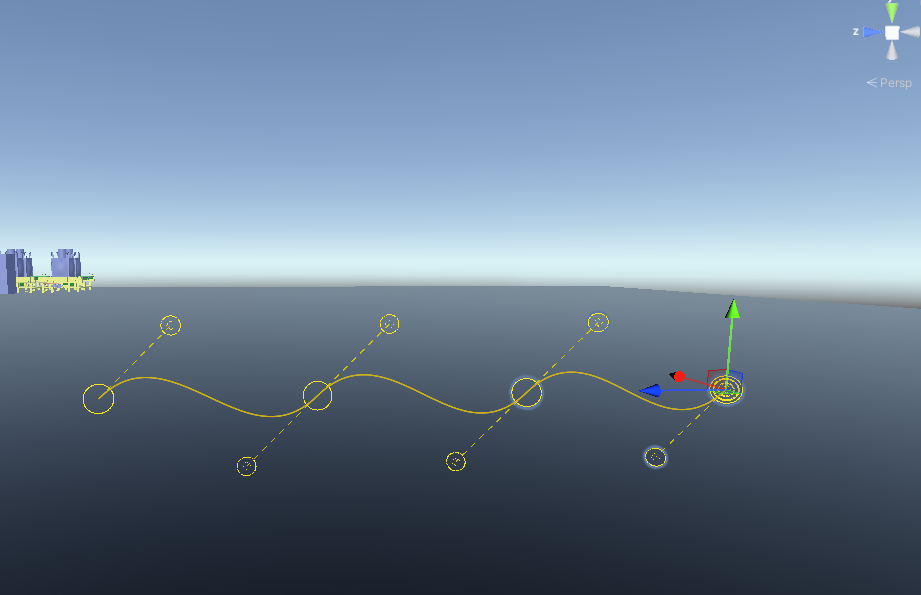
1:When using the trigonometric solution, was the DH parameter table used to unify and simplify the relative pose relationships between the joints and links of the robotic arm, serving as an auxiliary tool? Or was it purely a trigonometric solution without the DH parameter table?
2:Can I understand it as using a geometric solution, specifically applying trigonometric methods to calculate and handle the relationships between joints and determine the joint angles?
3:I'm using version 2021.05, and I'd like to achieve real-time IK motion for the robotic arm by directly dragging the TCP in play mode, just like in edit mode, where dragging the TCP instantly moves the entire robotic arm via IK. I don't want to drag the TCP to a position and then click "Drive to Target" to initiate the movement
4:Could you share the source code of the IKCalculator.dll file?
We are using a trigonometric solution which is able to calculate all possible solutions.

 About realizing digital twins for real stackers
About realizing digital twins for real stackers
Ask how to achieve a real-time digital twin of a real stacker and which component can change the real-time PLC position of the stacker in real time.
Customer support service by UserEcho
