Teilen Sie Ihre Erfahrunge und Wünsche mit uns und anderen Usern!

 spaceNavigatoer error mac
spaceNavigatoer error mac
despite removing the spacenavigator file in unity i still have problems.
------------------------------------------------

----------------------------------------------

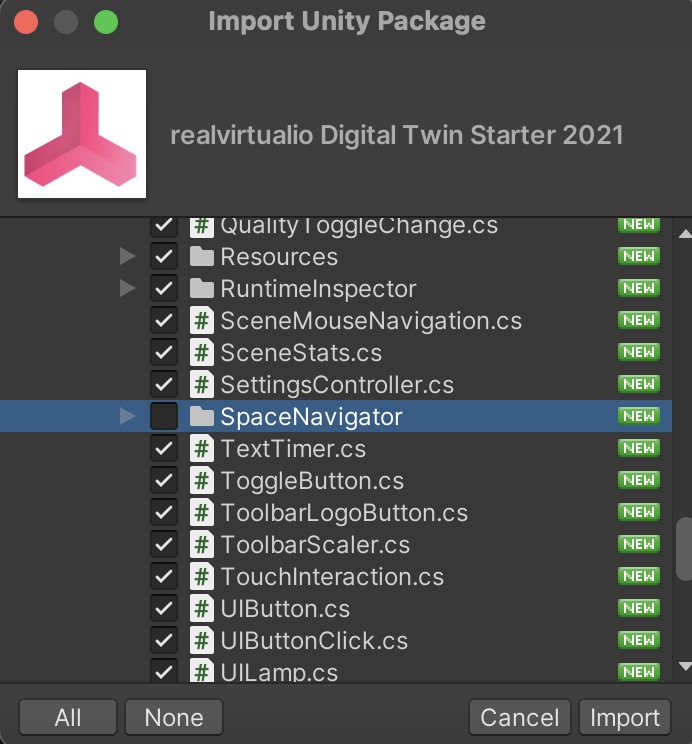
Solution is to delete the folder
Assets/game4automation/private/RuntimeUI/SpaceNavigator
and to change in the Script SceneMouseNavigationCs the following compile swith at the top and at the end of the script:
#if ((!UNITY_IOS && !UNITY_ANDROID && !UNITY_EDITOR_OSX) || UNITY_EDITOR)
against this:
#if (UNITY_EDITOR_WIN || UNITY_STANDALONE_WIN)
This will exclude Space Navigator from being used by non Windows Systems.
After doing this you need to select manually again (because automatic installation script was not started due to the compile error) Apply Standard Settings:
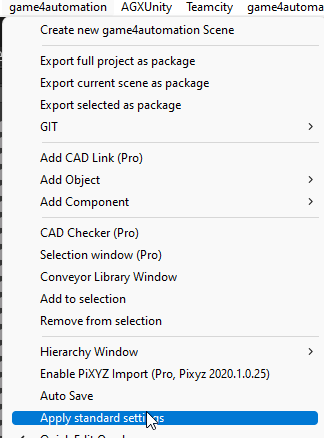
Will be changed in the next release.
 Do you provide a robotic arm demo like the animation on the webpage https://realvirtual.io/en
Do you provide a robotic arm demo like the animation on the webpage https://realvirtual.io/en
Hi
I'll begin to develop a robotic arm simulation software and I'm very interested in realvirtual.io. Will you provide a robotic arm demo like the animation on webpage https://realvirtual.io/en? Thanks.
No currently the animation on the webpage is not included with our delivery. In about 2 weeks from now on in our next release we will have an inverse kinematic included in realvirtual.io with 2 examples of two moving robots (ABB and Stäubli).
Coupled IO Disappearing when starting game
Hello,
I am adding IO Using a small attachment to the provided game4automation Scripts (for example in Drive_Simple).
For the drive simple example I use this code:
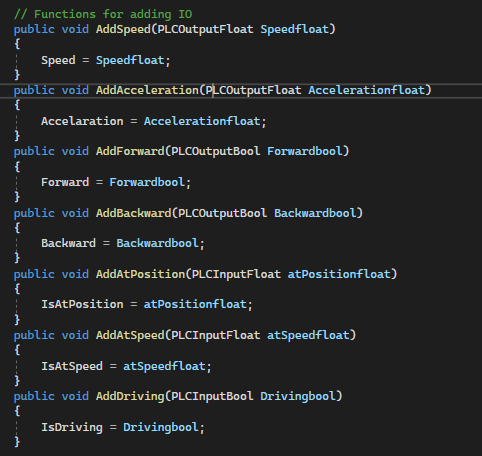
For my own scripts this works, but not for the provided game4automation scripts. I need to add IO using these functions because we have a lot of IO (+-5000).
When I start the game, the IO is removed from the script (also in the inspector). Is there a way to fix this?
Hi, I think you must Use EditorUtility.SetDirty function.
Please also check page https://realvirtual.io/documentation/current/signalmanager.html and the example script on the page.

Post Processing error when Integrating third party asset with game4automation
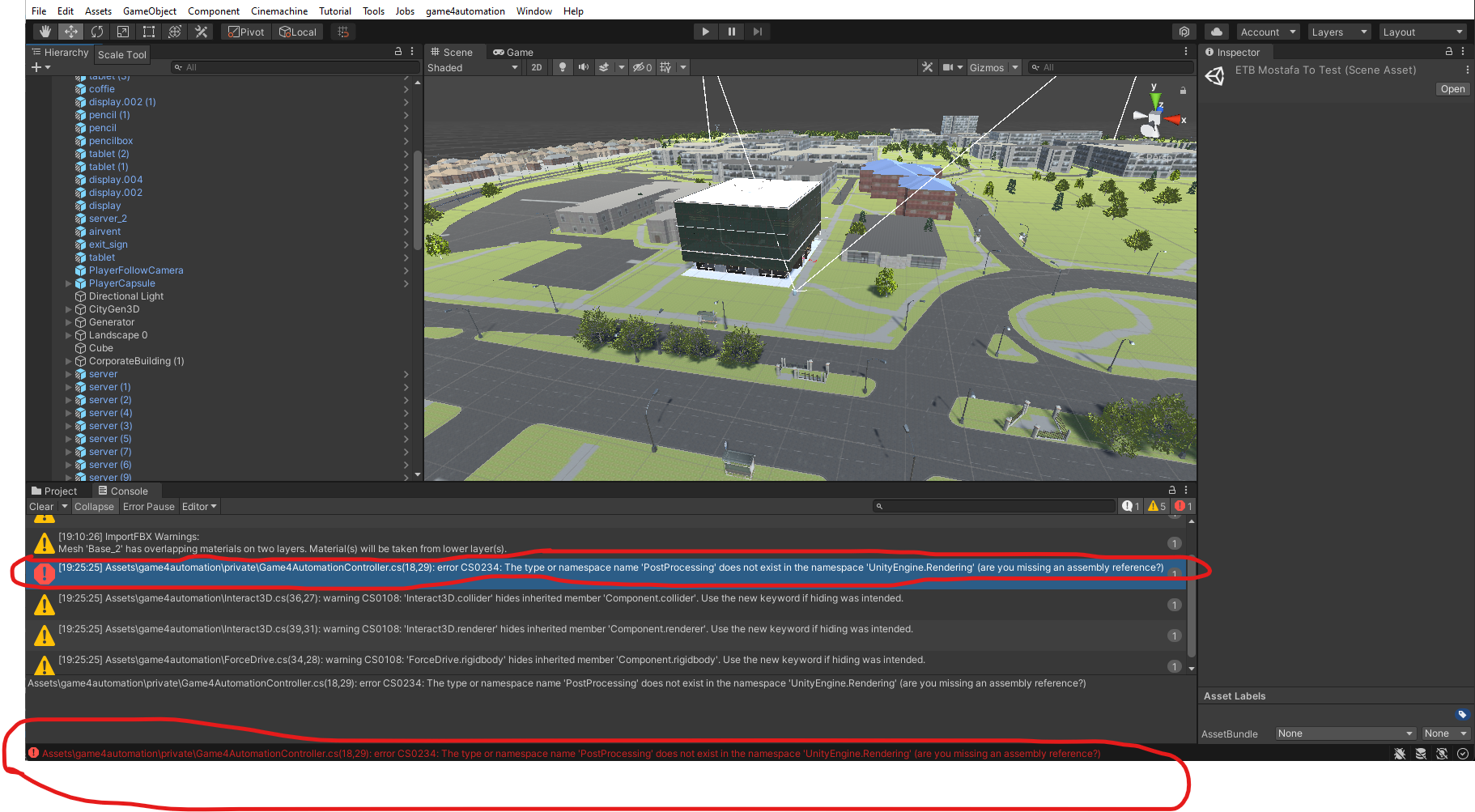
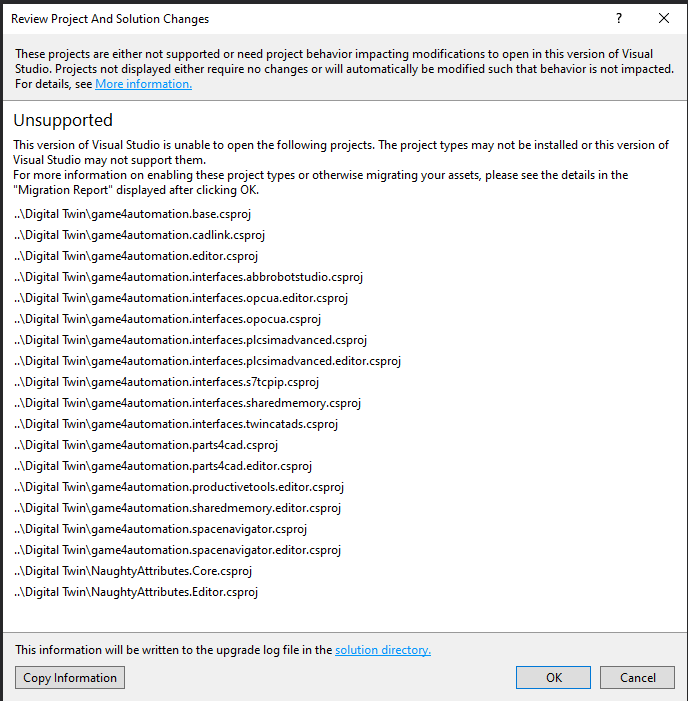
I have been facing a problem importing the game4automation asset (https://assetstore.unity.com/packages/tools/utilities/game4automation-digital-twin-starter-2020-139866#description) into a scene I made using an asset called CityGen3D (https://assetstore.unity.com/packages/tools/terrain/citygen3d-162468#description).
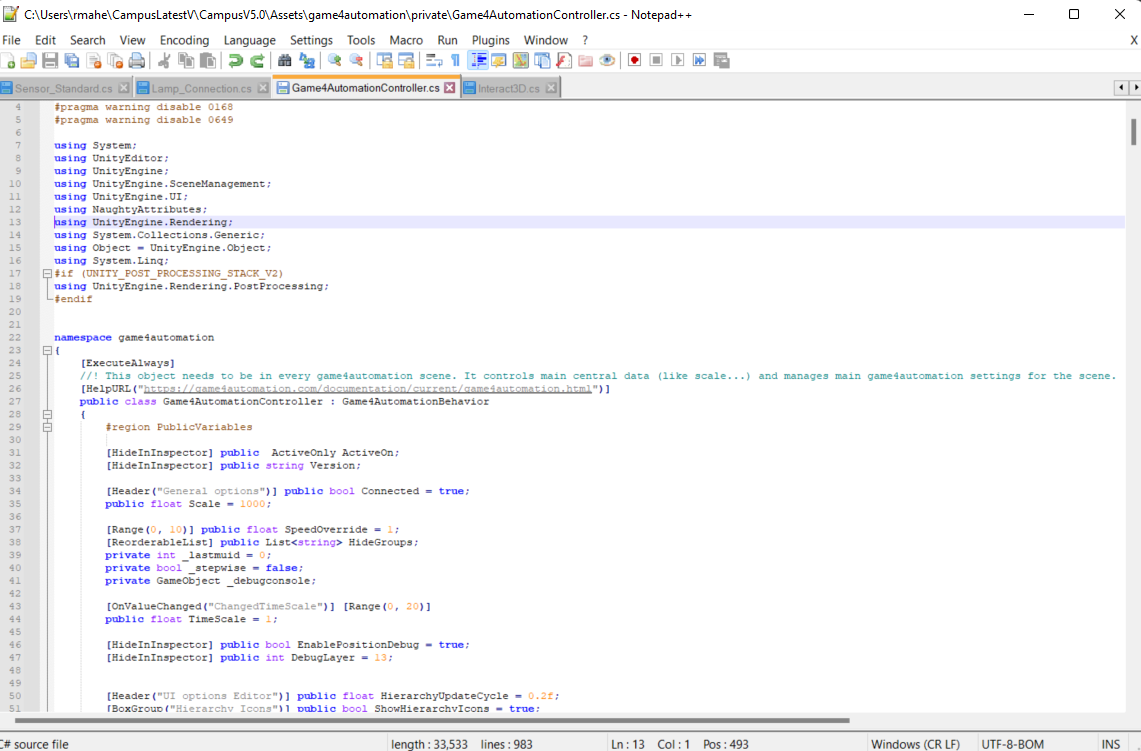
When I create a blank new project and use the game4automation asset without my own scene, it works perfectly fine. However, when I try importing the asset into my scene, I keep encountering a 'PostProcessing' error. If I double click on the error, it leads me to the code that contains some stuff about postprocessing (see second image attached). I am not sure what is causing this. May you be able to provide me some assistance? Please see attached images for the error.
Hi,
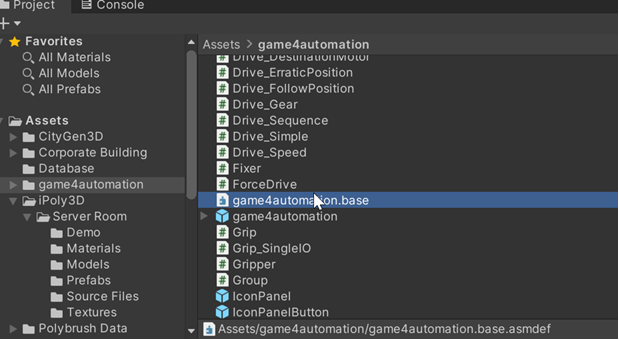
because your additional assets in the project are using Unity Postprocessing you need to put this into the Game4Automation.base Assembly definitions:
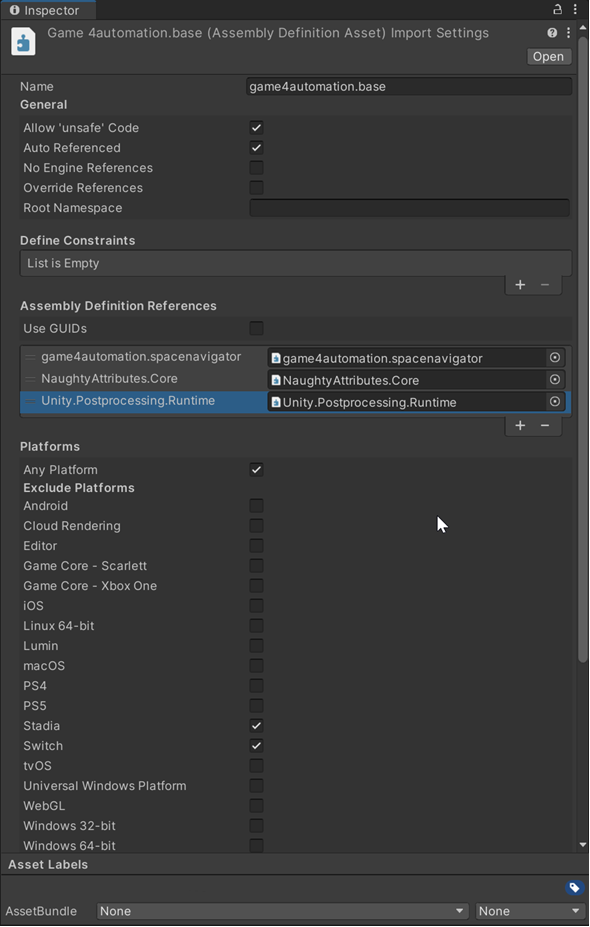
There is also some information about this here in the documentation:
https://game4automation.com/documentation/current/game4automation.html
... and if you need a pulse encoder - sending pules every xxx millimeters, this will be available in one of the next releases. If you are a customer and purchased a professional version - please send us an email to info@game4automation.com with your Invoice and we can send you a beta of the pulse encoder.

Hello Thomas,can I build an Android APP?
Hello Thomas,I connect my mobilephone with my PC through WIFI。But when I open PLCSIM advanced Interface in Android it does not appear a black window,so I can't connect my virtual PLC。If I want control my virtual PLC in Android what should I do?Can I do it?Thank you Thomas。
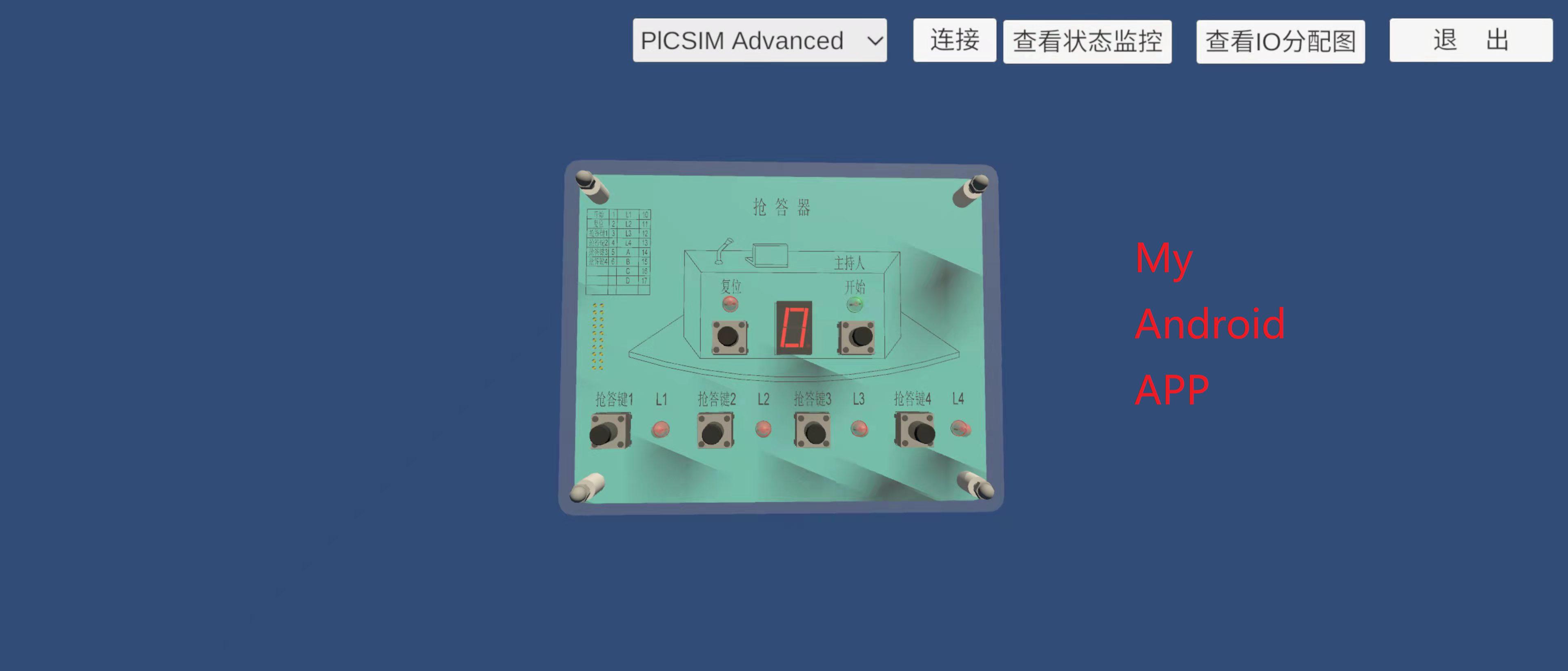
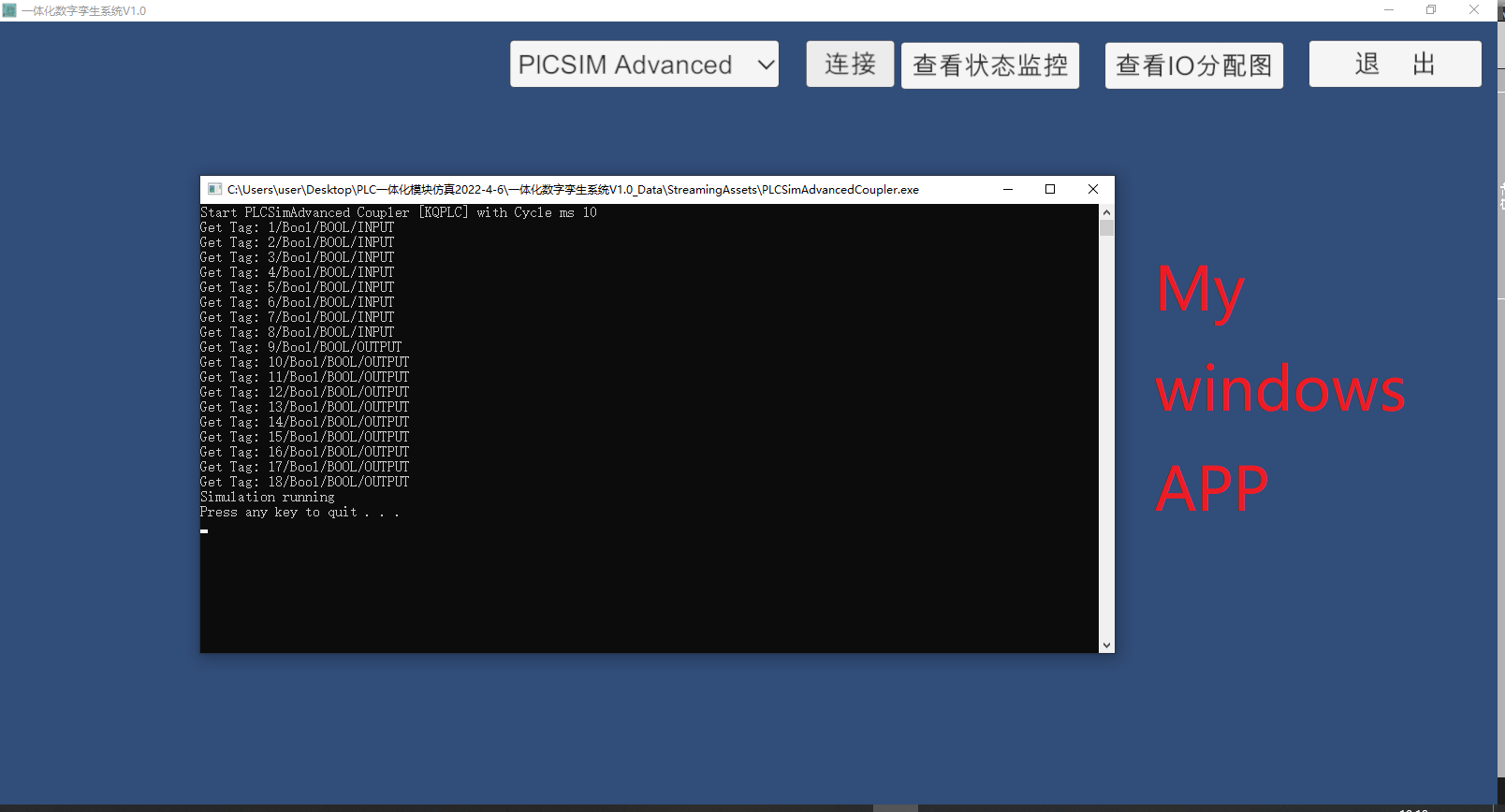

Hi, not all Interfaces are working on all Platforms. Unity is cross compiling to the destination platform but sometimes we need windows specific DLLs. PLCSim Advanced is not working on Android. But you could connect to it using the S7 interface. More information about platform limitations can be found here:
https://game4automation.com/documentation/current/platforms.html#Known-platform-limitations
Best regards
Thomas
vs code can open script, vs2019 unsupport open script
Hello,
If i set script open by vs code, it could be open C# behavior script.
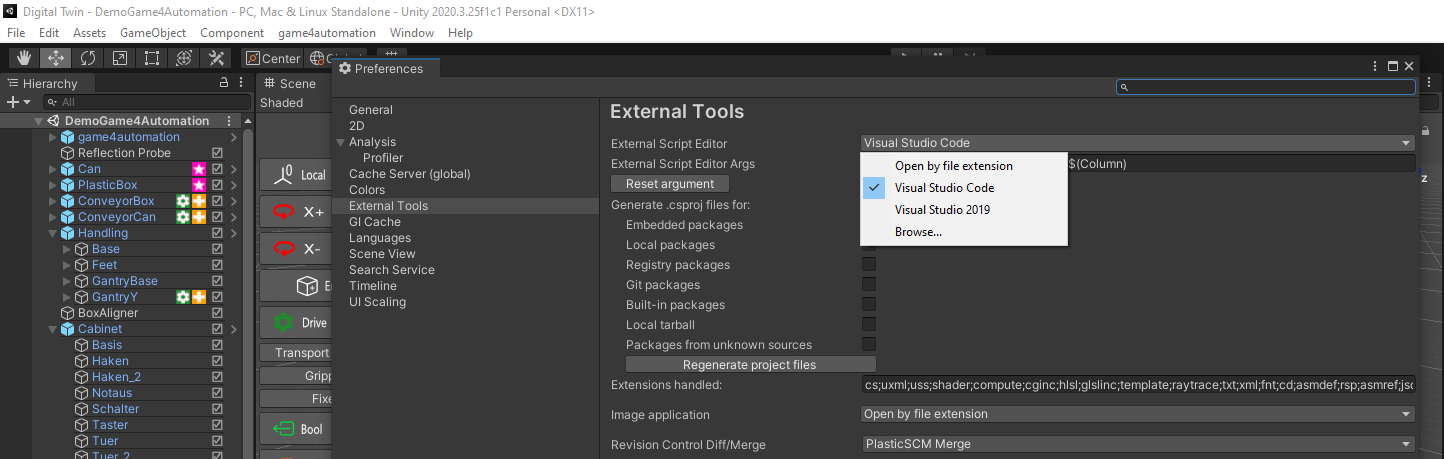
if i set script open by visual studio 2019, it could't open C# behavior script.
it is only support vs code ?
Roy
Hi, I would recommend Visual Studio 2019 - which is usually used. I have seen some customers using Code but I would not recommend it, because there might be some limitations. We are using Rider for development which is also very good with Unity but Rider is not for free.
If you have problems in using Visual Studio 2019 this is a general Unity or Visual Studio installation or setup problem.
Please follow this guide:
Start as a engineering office with game4automation.
Hello all,
we are a modern and new design office near Mundelsheim, Ludwigsburg
We want to start with game4atuomation from February and I have a few questions about it.
Do we need from Unity only the basic version for ca.369 € per year?
Is there already a synchronization for Inventor?
Is there a module for the Raspberry Pi for programming?
Details what we want to do:
We offer our customers so-called Engineering Starter Kits and want to sell first designs for automation projects. In this first phase we do not create any programming or simulations but we want to create a video/animation of the design with Playmaker. Programming and simulation will be added in the next phase. Many of our customers then use these videos for sales and meetings and to make decisions. It's important that we have robots and conveyors available or that we can import them easily. Later in the project we are using the other function too.
Would you say all this would fit well with Game4Automation?
Details on www.conwex.de
Thanks a lot
Greetings
Jan
Good morning,
I think this fits well vor Game4Automation. What do you mean with basic (369€) per year?
You need Unity Professional (about 150€ a month) and Game4Automation Professional (700€ for one license). You can import Inventor CAD data by exporting and importing them via STEP data format.
For the Rasperry PI what kind of a module are you looking for. We have implemented several industrial communication protocolls and if RasperrryPI is talking one of these protocolls communication with Game4Automation Signals would be also. Our source code is open so you could also implement your own custom interface to a rasperry pi.
You can also check our new FAQ if you have more questions:
https://game4automation.com/en/
Best regards
Thomas
custom data type
Hello,
I am working on importing signals with a custom data type like a structure using PLCSIM interface. I have an error saying that it is not supported. Do you have any method so that I can use these structure in Unity?
Hi Kévin,
currently we have no solution to support hat. It would require a support of this flexible data definition of the PLCInput and -Output side in Game4Automation and it would need to be implemented into the Game4Automation PLCSim Advanced Interface. There are currently no plans for that development.
Best regards
Thomas
Customer support service by UserEcho
