Teilen Sie Ihre Erfahrunge und Wünsche mit uns und anderen Usern!

 Compile errors on MQTT interface
Compile errors on MQTT interface
I wanted to do a fresh install of all the components:
- Unity Hub 3.9.1
- Unity 2022.3.49f1
- Realvirtual-Professional-2022.18
Up to this point everything is working fine.
I copy these folders into the assets directory
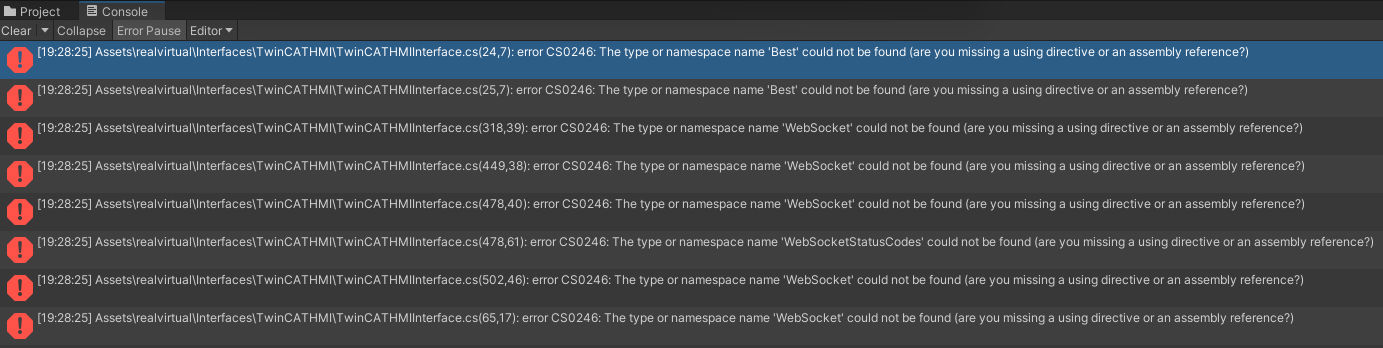
After adding REALVIRTUAL_BESTHTTP3 to the scripting define symbols I get compile errors:
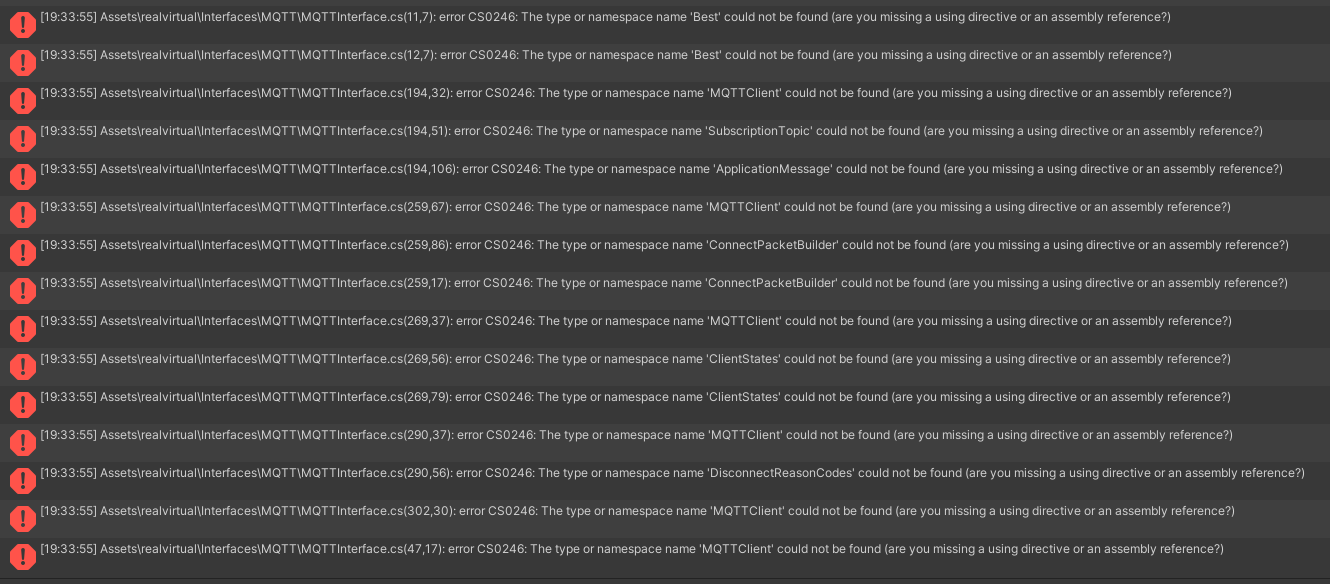
After adding REALVIRTUAL_BESTMQTT3 to the scripting define symbols I get additional compile errors:
What did I do wrong and how can I fix it?

How to cummunicate with an ABB robot through the Externally Guided Motion (EGM) interface?
Hi,
I'm trying to build a simple Digital Twin of an ABB robot. I'd like to use the Externally Guided Motion (EGM) interface provided by ABB to realize the real-time fast communication between the robot and my Unity sence with the help of realvirtual.io. However, there is no EGM interface in realvirtual.io. Does it mean that I have to build a ABB EGM custom interface by myself? I'm a green hand of Unity and C#. If I have to do that by myself, apart from a brief introduction to "custom interfaces" in the documentation of realvirtual.io, are there any other effective reference materials? Could you please provide some advice and assistance? Thanks a lot.

Hi,
If you're unfamiliar with Unity and C#, I highly recommend learning the basics first. Implementing an interface without this foundational knowledge would be very tough.
Regarding the suggestion to "use any of the existing interfaces as a blueprint and delete everything that is PLC/interface-specific"—what I meant is that you should reuse the C# code (the one script) of an existing interface and remove everything that's specific to that particular interface inside this script. However, doing this requires a good understanding of C# so that you can navigate and comprehend the code.
The parts you remove need to be replaced by C# code tailored to your custom interface (in your case, EGM, where you seem to have some examples on Github).
That said, simply copying and pasting code won't work in my opinion. You need a decent level of C# knowledge to properly implement and modify a custom interface.
Best regards
Thomas

 Fehler bei Plattformwechsel von Windows zu Android für Meta Quest 3 Build
Fehler bei Plattformwechsel von Windows zu Android für Meta Quest 3 Build
Hallo zusammen!
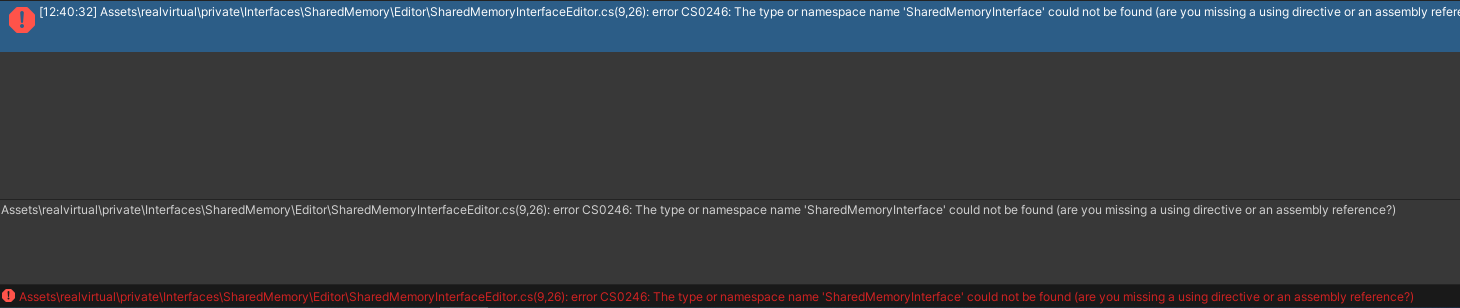
Diesen Fehler bekomme ich direkt beim Plattformwechsel von Windows zu Android. In dieser Szene befindet sich kein realvirtual GameObject und auch keine Assets dergleichen. Das Paket ist jedoch natürlich im Projekt enthalten.
Eigentlich sollte über die AssemblyDefinitions SharedMemory für Android ausgeschlossen sein. Vom Pfad her scheint es sich um eine ältere Version zu handeln. Um welche realvirtual Version handelt es sich. Notfalls einfach den Folder realvirtual/private/Interfaces/SharedMemory löschen.

TwinCat HMI Interface | Error in Connection
Hallo!
Ich wollte wissen, ob jemand Erfahrung im Umgang mit dem TwinCat HMI Interface hat, insbesondere mit Einstellungen die man eventuell im TwinCat Projekt vornehmen muss.
Ich habe zur Zeit das Problem, dass ich mit dem realvirtual TwinCat HMI Interface keine Verbindung zu meinem HMI Server herstellen kann. Über TwinCat ADS klappt es.
TwinCAT HMI | realvirtual.io User Documentation Die Einstellungen die hier vorgegeben werden, sind bei mir genauso.
Deswegen frage ich mich, ob es vielleicht an Einstellungen in meinem TwinCat Projekt liegt, also z.B. SSL/TLS verwenden oder nicht usw.
plc input disappear in
Hello,
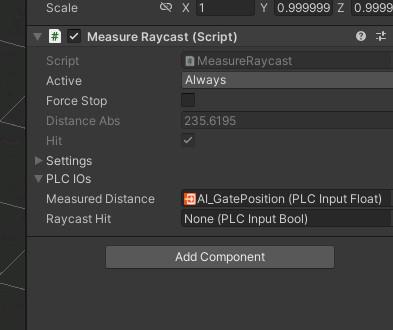
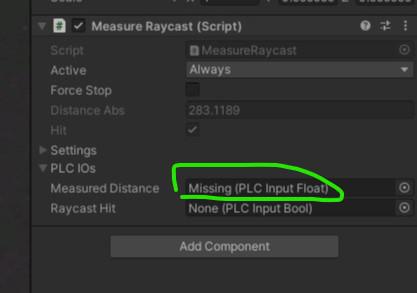
I created a Measure Raycast and linked with PLC Input Float, but when I start simulation the tag disappear and does not
communicate with PLC.
How can I fix?
Thanks!

 About device interface interconnection
About device interface interconnection
在一些项目中,不允许甲方使用信号采集工具直接访问PLC,而是通过甲方的设备管理平台访问WEBAPI接口。在 realvirtual.io 中,有没有方便的方法来进行这种连接?
Question was (translated by Deepl):
In some projects, Party A is not allowed to access the PLC directly using the signal acquisition tool, but accesses the WEBAPI interface through Party A's device management platform. Is there a convenient way to make this connection in realvirtual.io?
You would need to implement a custom interface based on the WebApi specification
Webgl Export wird in WinCC Unified nicht angezeigt
Hallo, ich habe das Demoprojekt von Realvirtual.io als Webgl 1 exportiert und möchte es als Custom Web Control in WinCC Unified einbinden. Die Schnittstelle ist erstmal egal, weil es im DemoModus läuft.
In Projektierungsmodus kann ich das Modell auch sehen. In der Runtime kommt leider ein weißes Fenster mit einem kleinen "Sorry" Icon oben links in der Ecke

An error message occurred during WebGL packaging
Hello,
I'm trying to package the webgl project now, but after I deleted the relevant folder as required, the build still gets the error, please how can I fix it.

Building Library\Bee\artifacts\WebGL\build\debug_WebGL_wasm\build.js failed with output:
emcc2: error: '"D:/Program Files/2021.3.32f1c1/Editor/Data/PlaybackEngines/WebGLSupport/BuildTools/Emscripten/binaryen\bin\wasm-opt" --strip-dwarf --post-emscripten --no-exit-runtime -O3 --low-memory-unused --zero-filled-memory --strip-debug --strip-producers Library/Bee/artifacts/WebGL/build/debug_WebGL_wasm/build.wasm -o Library/Bee/artifacts/WebGL/build/debug_WebGL_wasm/build.wasm --mvp-features' failed (3221226505)
UnityEngine.GUIUtility:ProcessEvent (int,intptr,bool&)
BuildFailedException: Incremental Player build failed!
UnityEditor.Modules.BeeBuildPostprocessor.PostProcess (UnityEditor.Modules.BuildPostProcessArgs args) (at :0)
UnityEditor.WebGL.WebGlBuildPostprocessor.PostProcess (UnityEditor.Modules.BuildPostProcessArgs args) (at /Volumes/jenkins1/sharedspace/ra_2021.3/PlatformDependent/WebGL/Extensions/Unity.WebGL.extensions/BuildPostprocessor.cs:179)
UnityEditor.Modules.DefaultBuildPostprocessor.PostProcess (UnityEditor.Modules.BuildPostProcessArgs args, UnityEditor.BuildProperties& outProperties) (at :0)
UnityEditor.PostprocessBuildPlayer.Postprocess (UnityEditor.BuildTargetGroup targetGroup, UnityEditor.BuildTarget target, System.Int32 subtarget, System.String installPath, System.String companyName, System.String productName, System.Int32 width, System.Int32 height, UnityEditor.BuildOptions options, UnityEditor.RuntimeClassRegistry usedClassRegistry, UnityEditor.Build.Reporting.BuildReport report) (at :0)
UnityEngine.GUIUtility:ProcessEvent(Int32, IntPtr, Boolean&)

Help doing a basic project.
I want to do a project that looks like the demo, but i have tried to do it modifying the demo but i have no clue. I am looking on how to do a conveyor with a sensor at the end. I want to make two sources, two cans with different heigts, one one (i would like to make them appear random, but that i will try to do it further along the project since i guess is harder). Then the ones that are high enough to make the sensor go on, to grap them and put them on a parallel conveyor. When a can touches the first conveyor, i want the conveyor to stop until it is picked up.
later on, i would like to connect this to a plc siemens, so i would like to get started this project by projecting it on this goal (meaning to put the sensor as an output, something like that)
I am looking for help to put me in the path on completing the project because i do not know how to start and i have watched the tutorials. Any help is appreciated.
thank you

VIETNAM-ALREADY CONNECTED PLC S71200 BUT CANNOT EXCHANGE DATA BETWEEN PLC AND UNITY
Dear friends.
I already connected PLC S7-1200 and Unity sucessfully.
However, There is no data signal exchanged between PLC (Tia Portal) and Unity.
Please help to find out and solve this problem.
Your prompt support will be highly appreciated.
My test: Turn on the light from Unity via Plc S7-1200.
Hi,
please check if everything is configured well, specially:
- Prevent collissions with real inputs
- Configure the PLC like described here: https://doc.realvirtual.io/components-and-scripts/interfaces/s7-tcp#configuring-the-plc
Best regards
Thomas
Customer support service by UserEcho
