Teilen Sie Ihre Erfahrunge und Wünsche mit uns und anderen Usern!
 Licence
Licence
Good morning
I have the OPCU4Unity license and I am currently working with the personal version of Unity.
I am developing a project for a client in his factory, my questions are the following:
- Can I implement this development in my client's factory with Unity Personal without licensing problems with Unity?
- If the entire project exceeds €100,000, even if the development in Unity is only a small part, should I change the license in Unity?
It is a private project that will never be in the appstore.
In your opinion, what do you think is the best way (in terms of licensing with Unity) to do industrial projects without having problems?
Thank you very much for your attention

Hello,
if you don't deliver our solution as source code but only as compliled applications you can do everything what you want.
Concerning Unity you should check Unity license conditions carefully but generally if you really earn money you need to use a Unity Professional license at least.
Best regards
Thomas
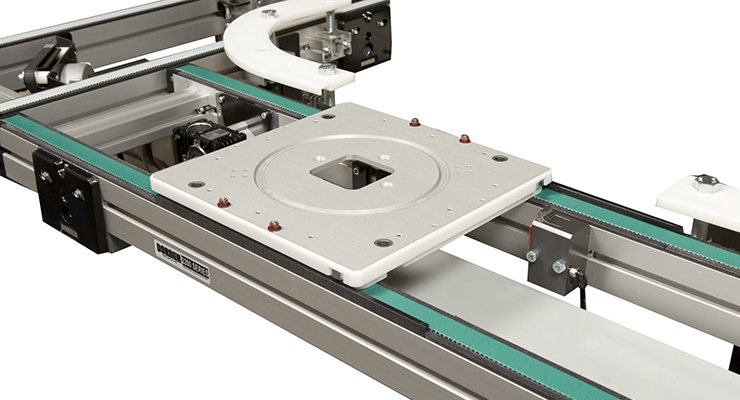
 Conveyor Belt
Conveyor Belt
Can real virtual be able to support a curved timing conveyor belt? How should I proceed with setting it up?
It has plates that go around the whole conveyor.
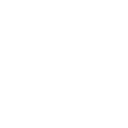
IKPath in a webgl build
Hello,
After deleting all the folders listed in the documentation(except RobotIK which does not exists in the project as a folder),
And creating a script which includes an IKPath variable.
When trying to build for WebGL i'm getting the following error:
"Assets\NewBehaviourScript.cs(8,5): error CS0246: The type or namespace name 'IKPath' could not be found (are you missing a using directive or an assembly reference?)"
(this error happen only when building not when running in the editor)
This script is important for the project.
Is that fixable?
Is there a work around
Unity Version: 2022.3.15f1
Real virtual version: 2022.09.3800
Thank You and Best regards.
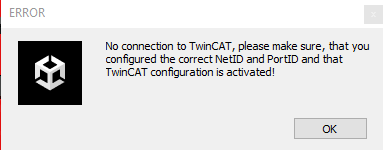
Twincat 3 Anbindung an einem anderen PC im selben Netzwerk
Hallo zusammen,
bin noch sehr neu in der Bedienung von realvirtual. Meine Frage ist, wie ich denn mit der Twin Cats Ads Interface Komponente mich mit einem anderen Rechner im selben Netzwerk auf dem Twincat 3 die configuration aktiv ist verbinde.

Scene and gamemode are different
Hello,
can someone explain, why the box does get bigger when switching in gamemode? How can i avoid it?
First picture shows scene mode (how i want it to look like), second shows gamemode.
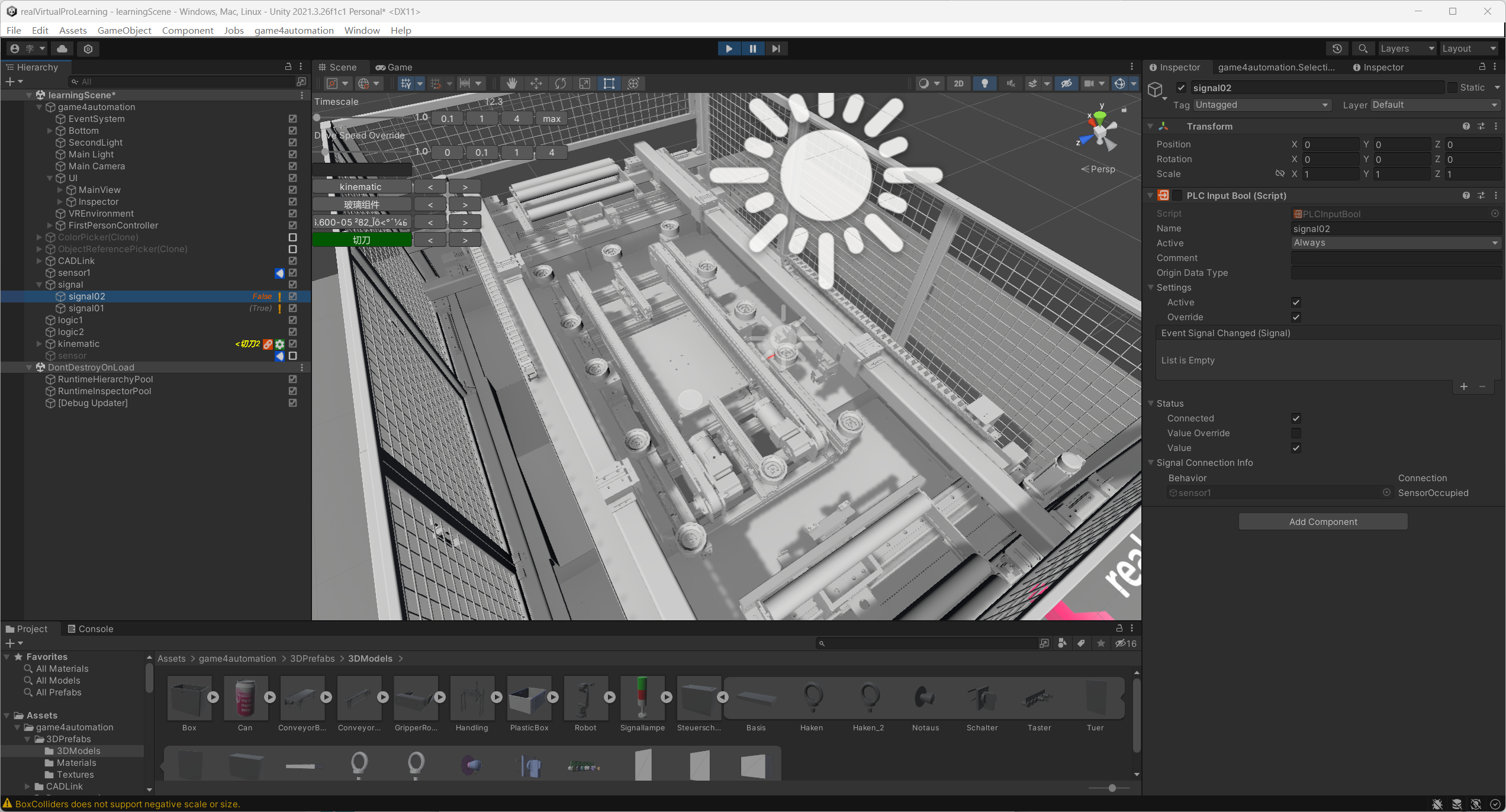
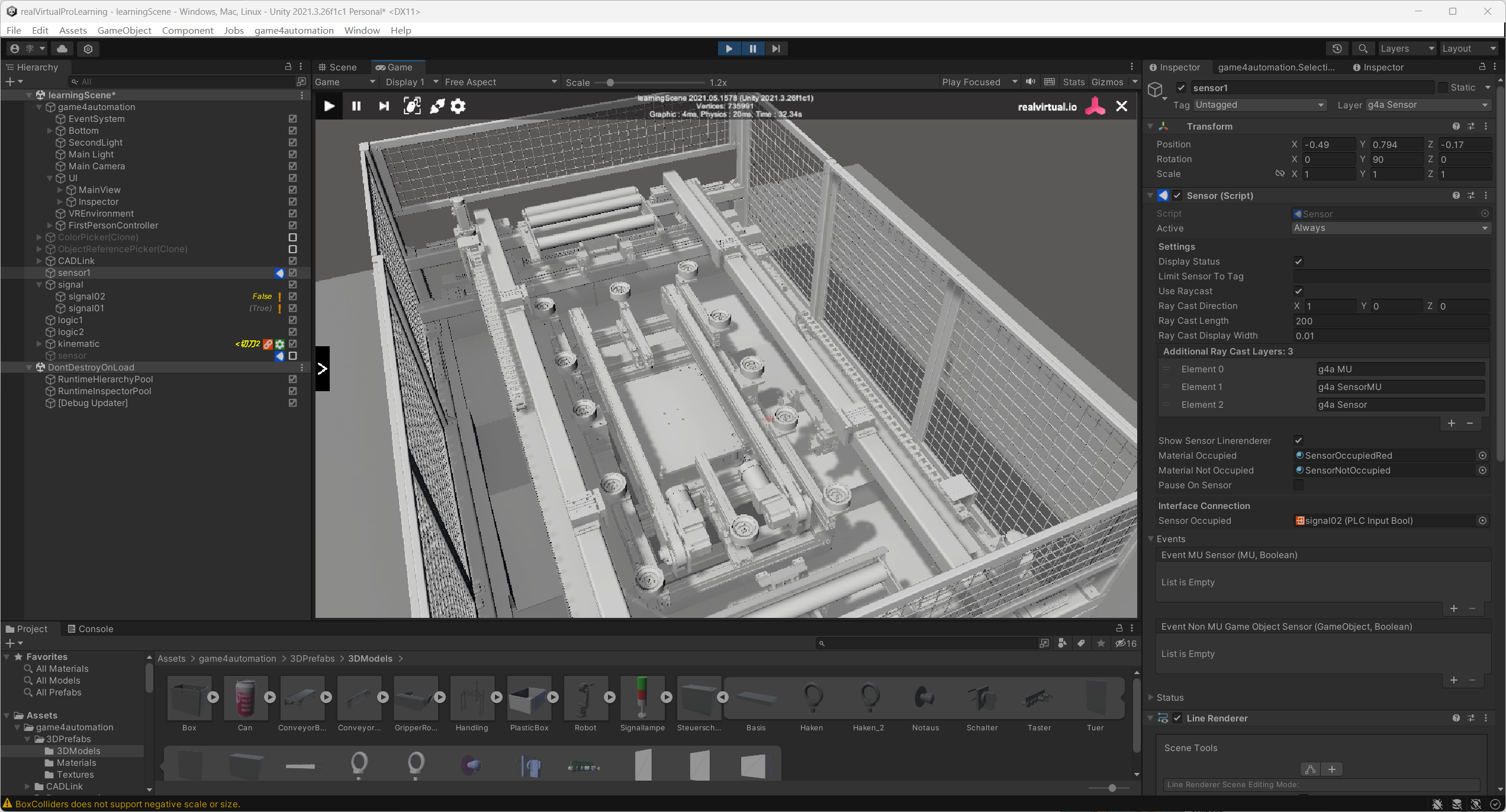
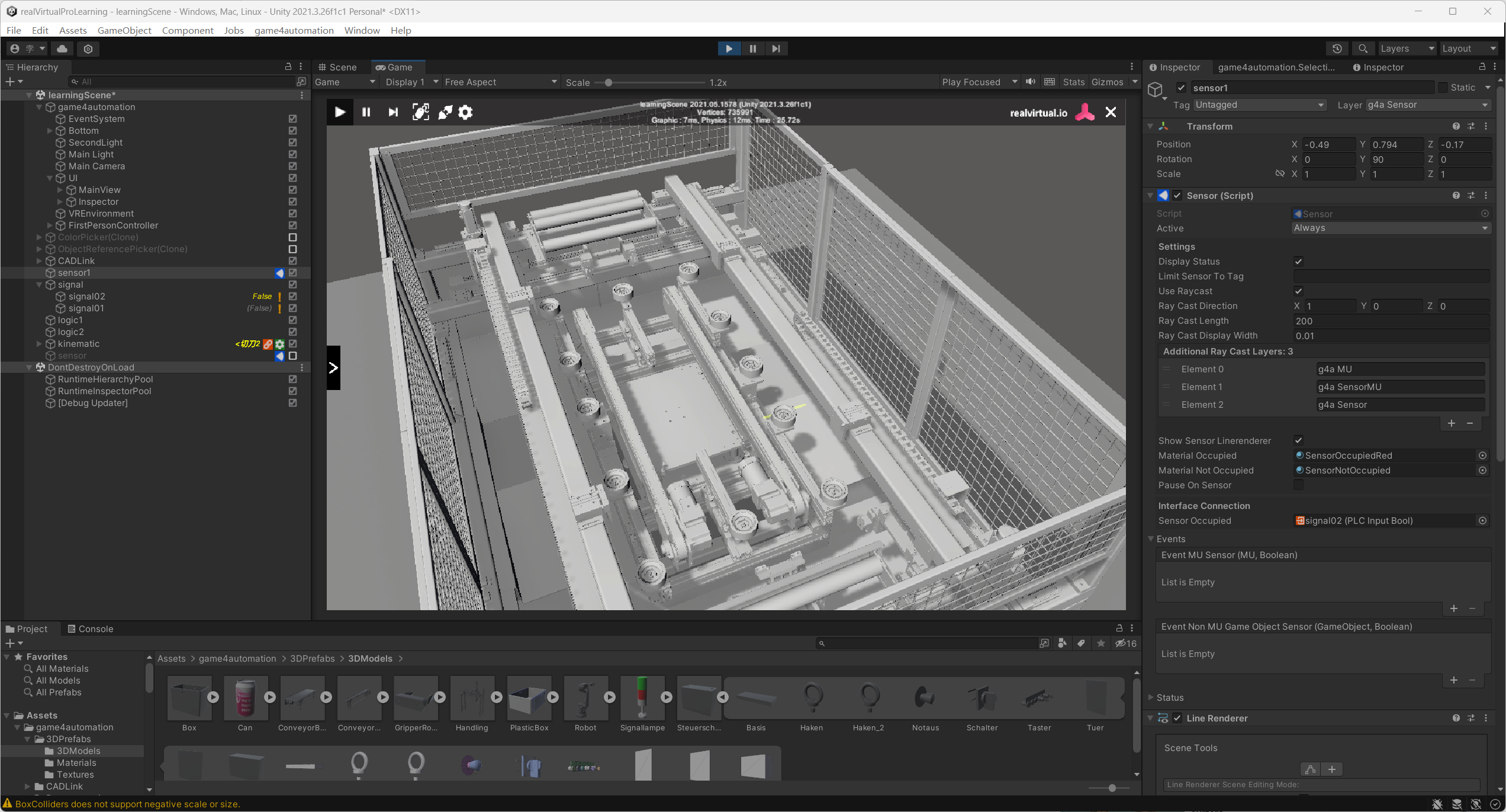
why I cant change PLC input signal by sensor?
Here is my problem.I have 2 signals:the “signal01” is to control object01 to move or to stop,and the “signal02” is to control another object02. I set a sensor called “sensor01” ,when object01 move to a certain place,the “sensor01” could detect it .However,it failed to change “signal02”,which is still false.
I have put relevant settings in those pictures below,can someone help me to resolve this strange problem?I have suffered from this one for nearly one week.
 Targets not working after update to latest version
Targets not working after update to latest version
Hello folks!
Since I updated to version 2021.16.2412 I can no longer define working targets. They look like
on the screenshot. Any idea what's happening?
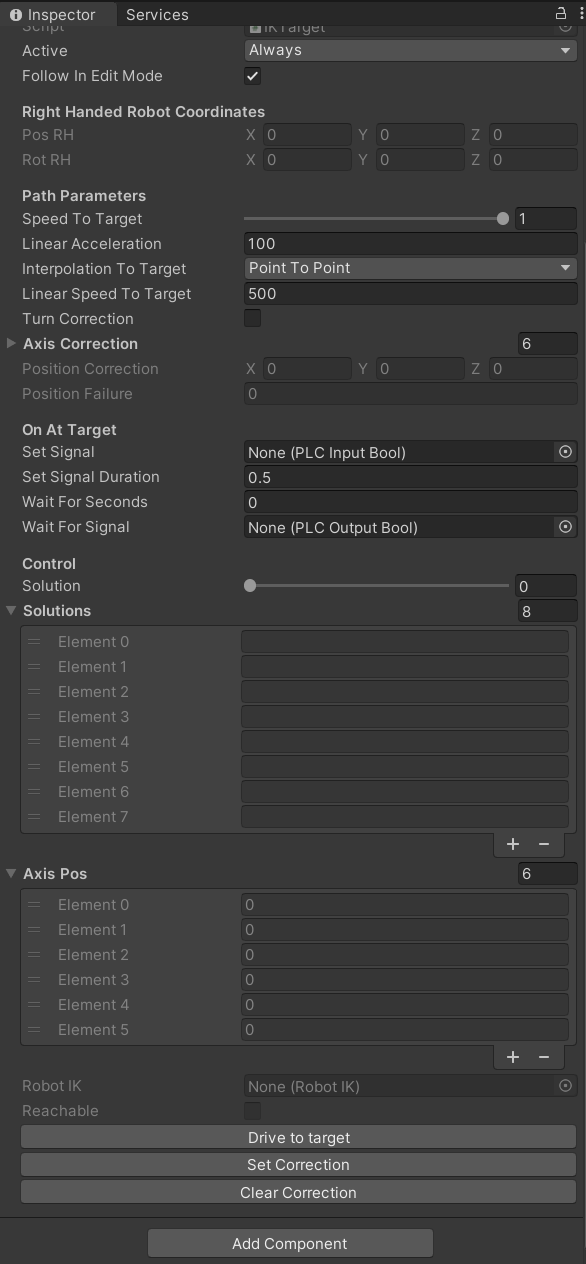
Regards,
Bear
Hi,
I have checked your scene. Please update to our latest version 2021.17 and the problem should be fixed. Let me know if there are any other problems.
Regards
Christin
realvirtual's simulink interface
您的文档描述了 realvirtual 的 simulink 接口,但我找不到相关块,并且电子邮件显示无法发送,我如何获取应用程序?谢谢!
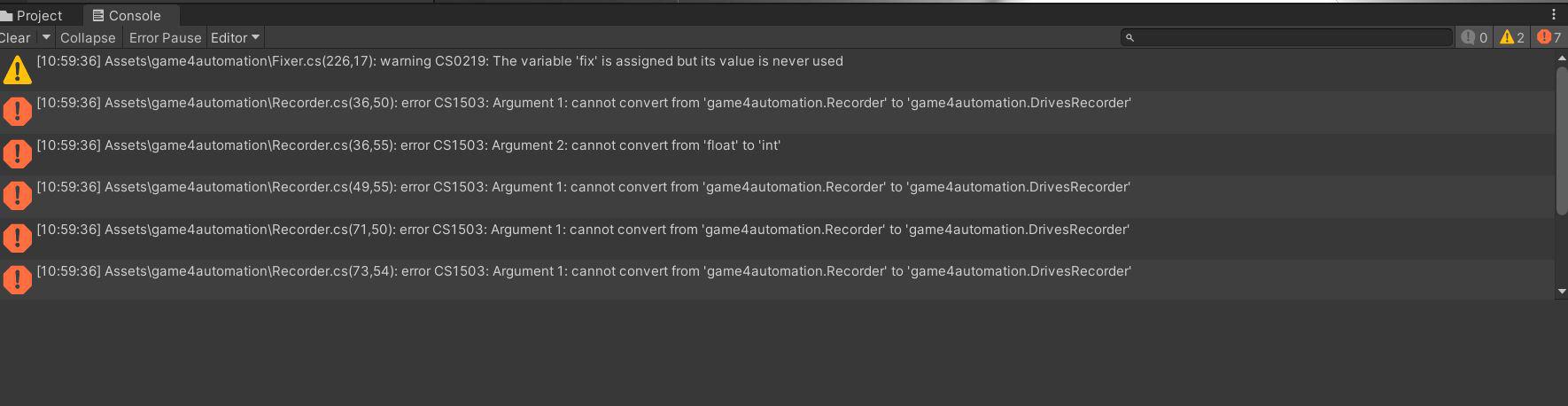
Errors after Realvirtual.io update to the latest version (2021.16)
Hi,
after updating to the latest Realvirtual.io version, I get the following errors in my project:
Can you help fixing them?
EDIT: I already fixed it (deleted old "recorder.cs")!
Please delete the Recorder.cs script in the game4automation folder. This functionality has been replaced by the script DrivesRecorder.cs. With
an update of an existing project, obsolete scripts are not automatically deleted. We will check here whether we can automate this.
this automatically.
Customer support service by UserEcho

{kind=link}