Teilen Sie Ihre Erfahrunge und Wünsche mit uns und anderen Usern!

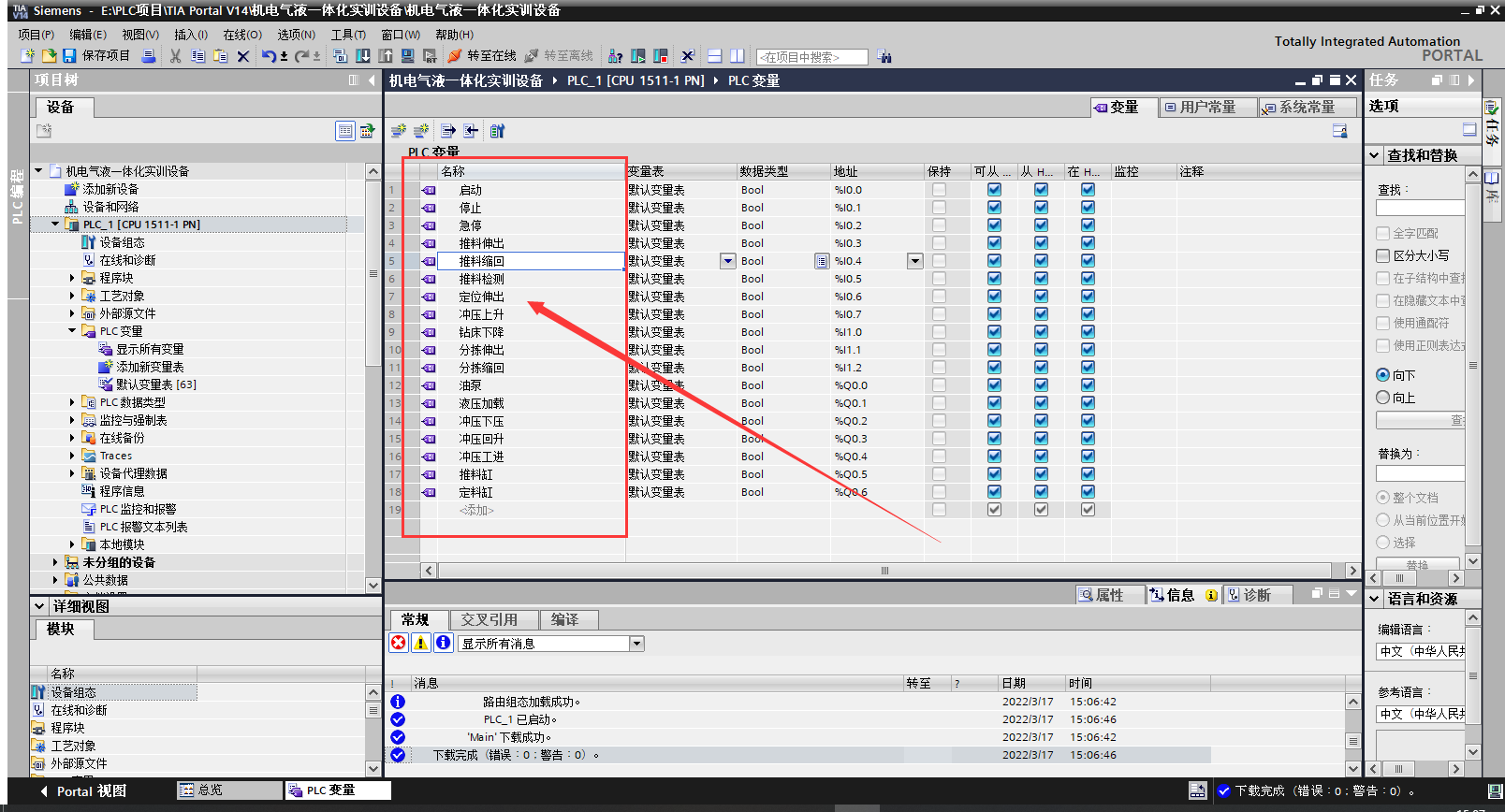
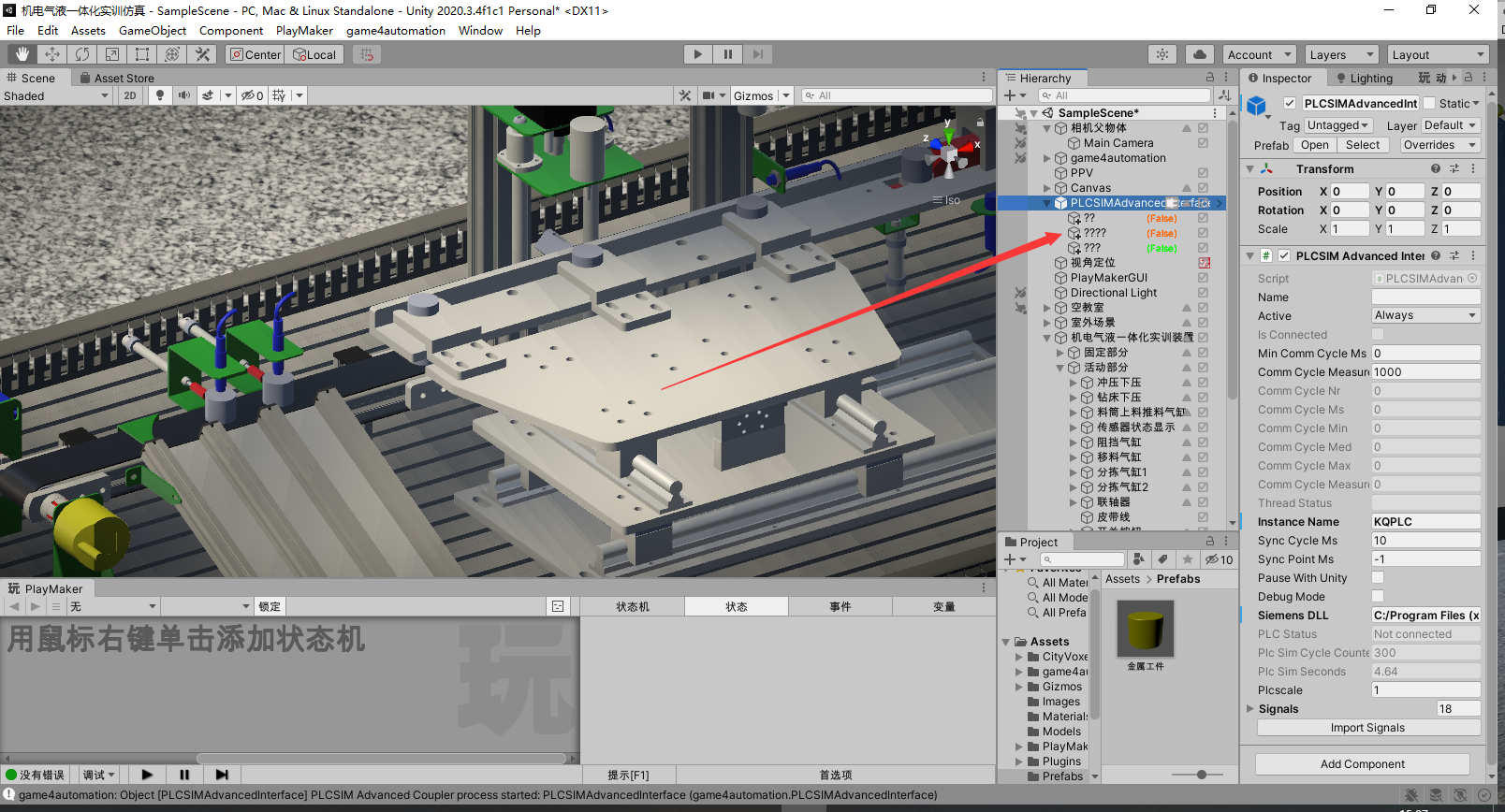
 Hello Thomas,I noticed PLCsim advanced Interface only support English name
Hello Thomas,I noticed PLCsim advanced Interface only support English name
Hello Thomas,I noticed PLCsim advanced Interface only support English name,when I input Chinese name it shows ???? in Unity and I could not use them。Could you support Chinese name in future?Most of people are not good at English in China,thank you Thomas。

 Integrating detailled hardware behavior models into Unity
Integrating detailled hardware behavior models into Unity
Good day to you,
We have been using your asset Game4Automation Professional for a few weeks now and are very impressed with its functionalities. We quickly found out that especially the interoperability between tools and the intransparency of different company landscapes make the biggest troubles.
We also use another VIBN tool that already provides many libraries and templates for behavior models of drives, for example. These are mapped in FBD or a similar language, and there is also an image of this as XML, which can apparently be used for the external VIBN tool's C# programming. How to use this, however, we neither know for the external tool nor for Game4Automation yet. In order not to have to create a new behavior model for the drives of our VIBN in Unity every time, it would be good if we could take over the existing models completely or at least only with small adjustments. Do you already have experience with this, or do you know customers who have to deal with the same problems?
After further research we came across FMI, among others, which is supported by G4A Pro. Is this interface the right one to integrate behavior models from, for example, a Sinamics S120 drive from Siemens into Unity?
Or do we always have to access a library of an external tool for this? We can't currently test the FMI export of the other VIBN tool because it costs extra, so we'd like to make sure we're on the right track before purchasing it.
Do you furthermore have experience whether component manufacturers share the behavior models of their products with customers (especially also as FMI)?

Hi,
FMI could be the future standard for behavioral model exchange, but currently it seems that you can't get FMUs of any component from the OEMs. And I'm pretty sure that you can't export FMUs from Simit, for example, and that Siemens doesn't provide FMUs for their own drives (Siemens is interested in selling Simit, not replacing it ;-)). Currently I would not rely on FMUs to replace own behavior models. Unfortunately, I don't see an industry accepted standard being available anytime soon. If you are a Simit user and have your own behavior models, then you can continue to use them and Simit along with Game4Automation.
I hope this helps, even though it may not be the answer I was hoping for.
Best regards
Thomas
 OPCUA runs in player/editor but indicates "specified license not valid" in build (G4APro licensed)
OPCUA runs in player/editor but indicates "specified license not valid" in build (G4APro licensed)
In my application I use (this time) only the OPC UA connectivity of my G4A prof licensed installation. In player and editor all is working well but when I run a build the log shows "The specified license is not valid." and therefore makes no connection.
Hi, I am in vacation until this Thursday. I think it will be best to look first into your project and to check. You can send us your NDA to info@game4automation.com and I can sign on Thursday morning.
Best regards
Thomas
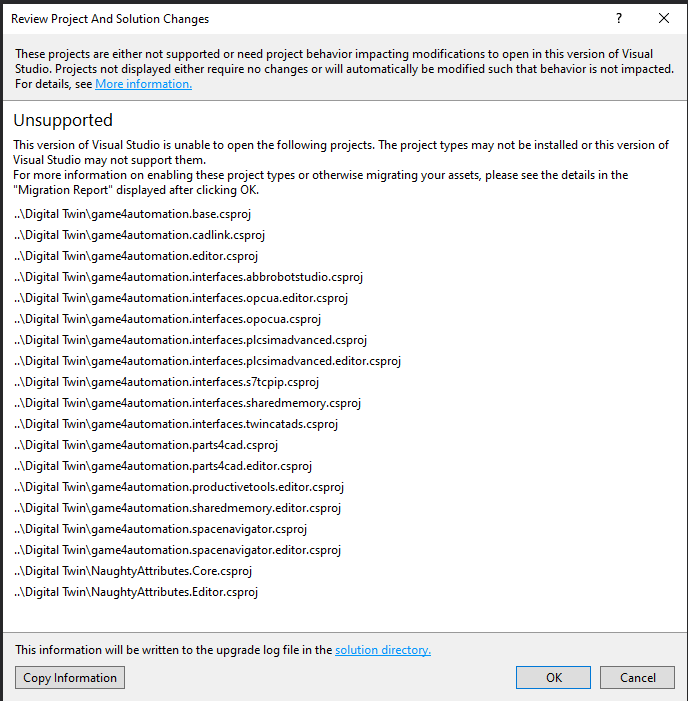
vs code can open script, vs2019 unsupport open script
Hello,
If i set script open by vs code, it could be open C# behavior script.
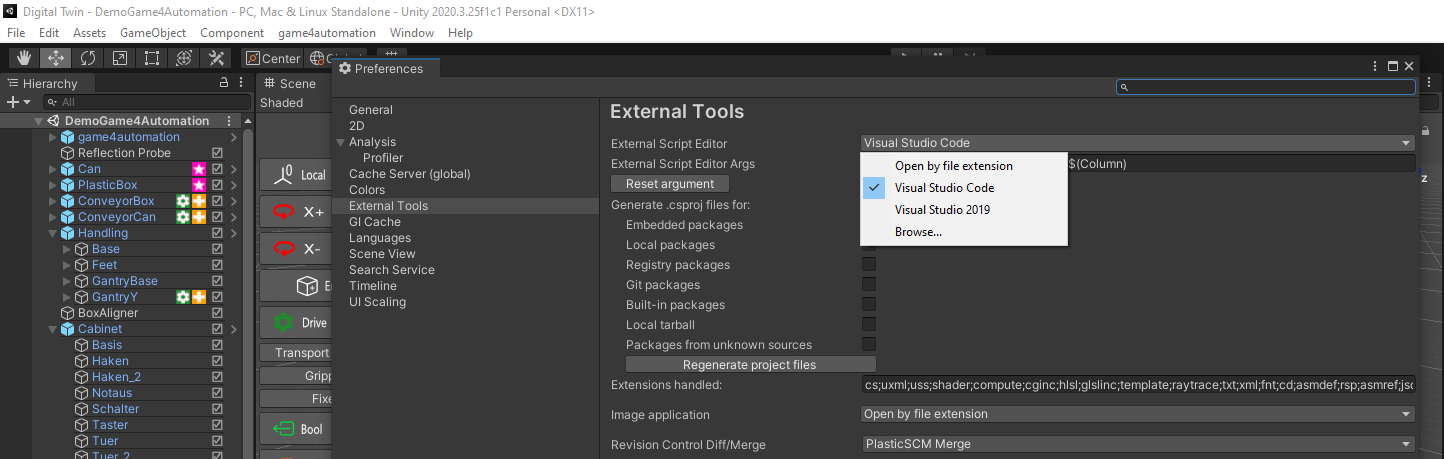
if i set script open by visual studio 2019, it could't open C# behavior script.
it is only support vs code ?
Roy
Hi, I would recommend Visual Studio 2019 - which is usually used. I have seen some customers using Code but I would not recommend it, because there might be some limitations. We are using Rider for development which is also very good with Unity but Rider is not for free.
If you have problems in using Visual Studio 2019 this is a general Unity or Visual Studio installation or setup problem.
Please follow this guide:
Conveyor can run but the source always go down
Hello
Question:Conveyor can run but the source always go down which parameter set wrong?
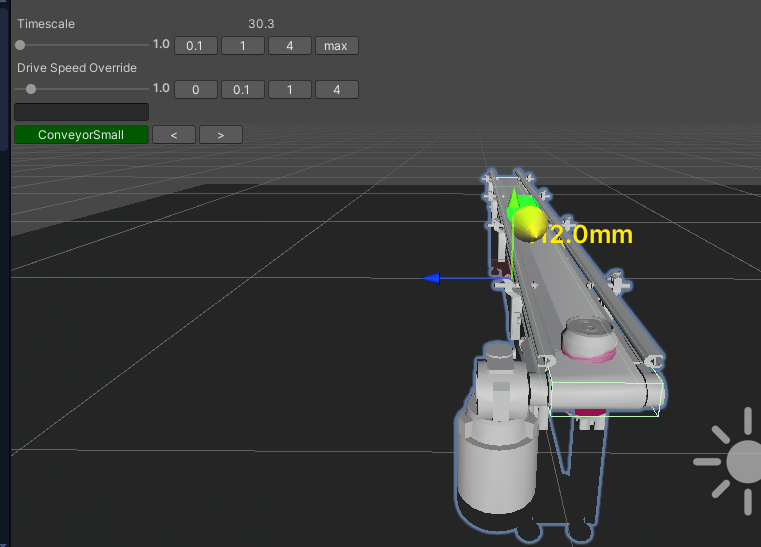
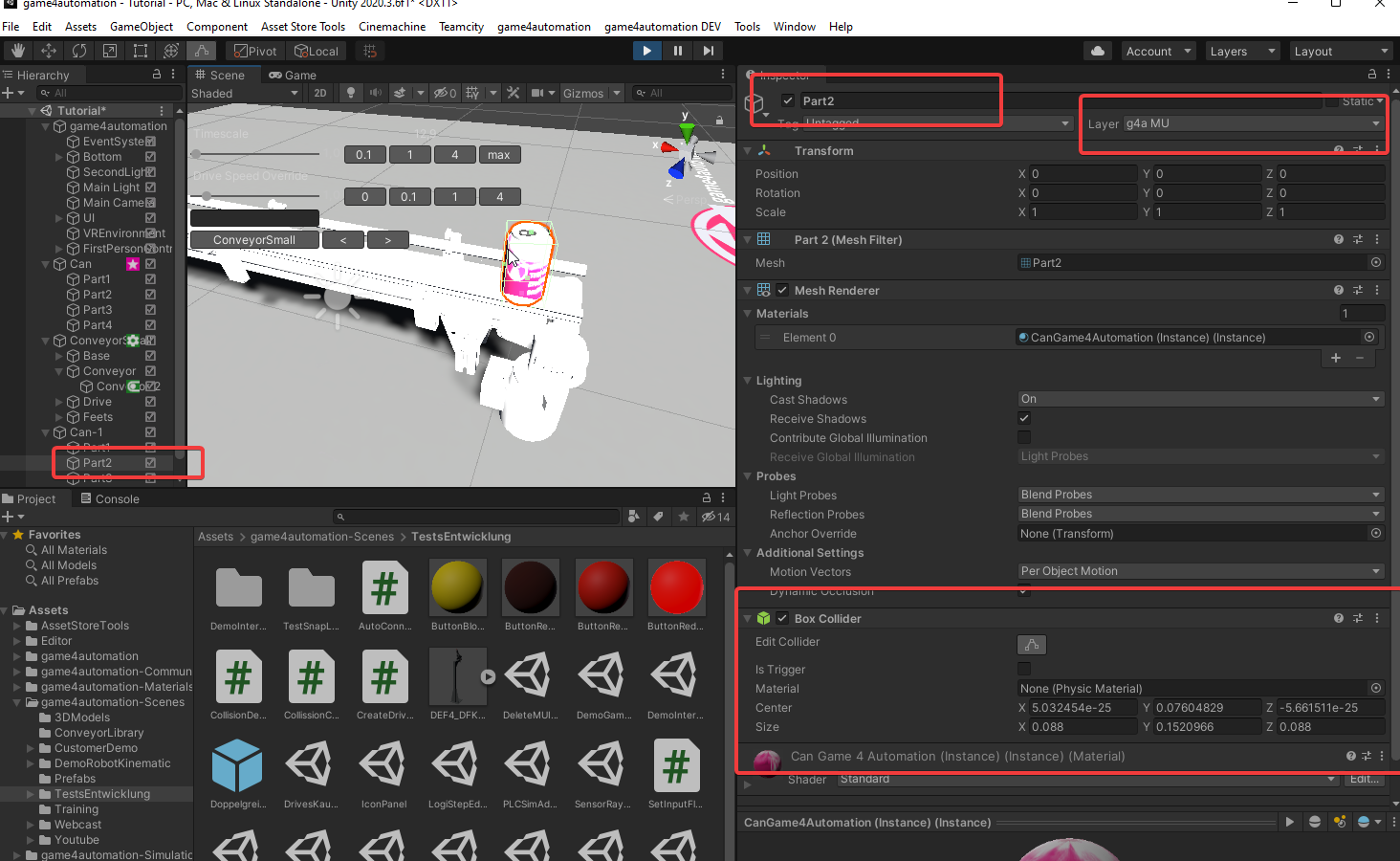
The colliders of the MU are not defined as they should. You can compare with the MUs in the Demo scene.
You need to have at least one box collider on an MU which is on the layer g4a_MU (see my sceenshot). This layer is working for transport collissions as well as sensor collissions.
Please also check:
https://game4automation.com/documentation/current/physics.html
The example MU in the demo scene is even more complicated. It has two colliders - one for the transport (like realistic rolling on the bottom - on the layer g4a_TransportMU) and one for the sensor on the layer g4a_SensorMU.
OPC UA connection with Rexroth ctrlX
Hi, we tried to create a simulation with G4A and OPCUA4Unity together with a Rexroth ctrlX as OPC UA server. But unfortunate the client doesn't want to connect. The ctrlX offers only secure Endpoints but the OPCUA4Unity doesn't accepts them. Is there a reason for that or could we configure the client to accept this?
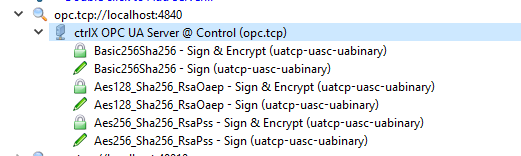


Please try both - latest OPCUA4Unity and the version before. We replaced the full OPCUA basis library in latest release.
Starter version didn't show game4Automation in the menu bar
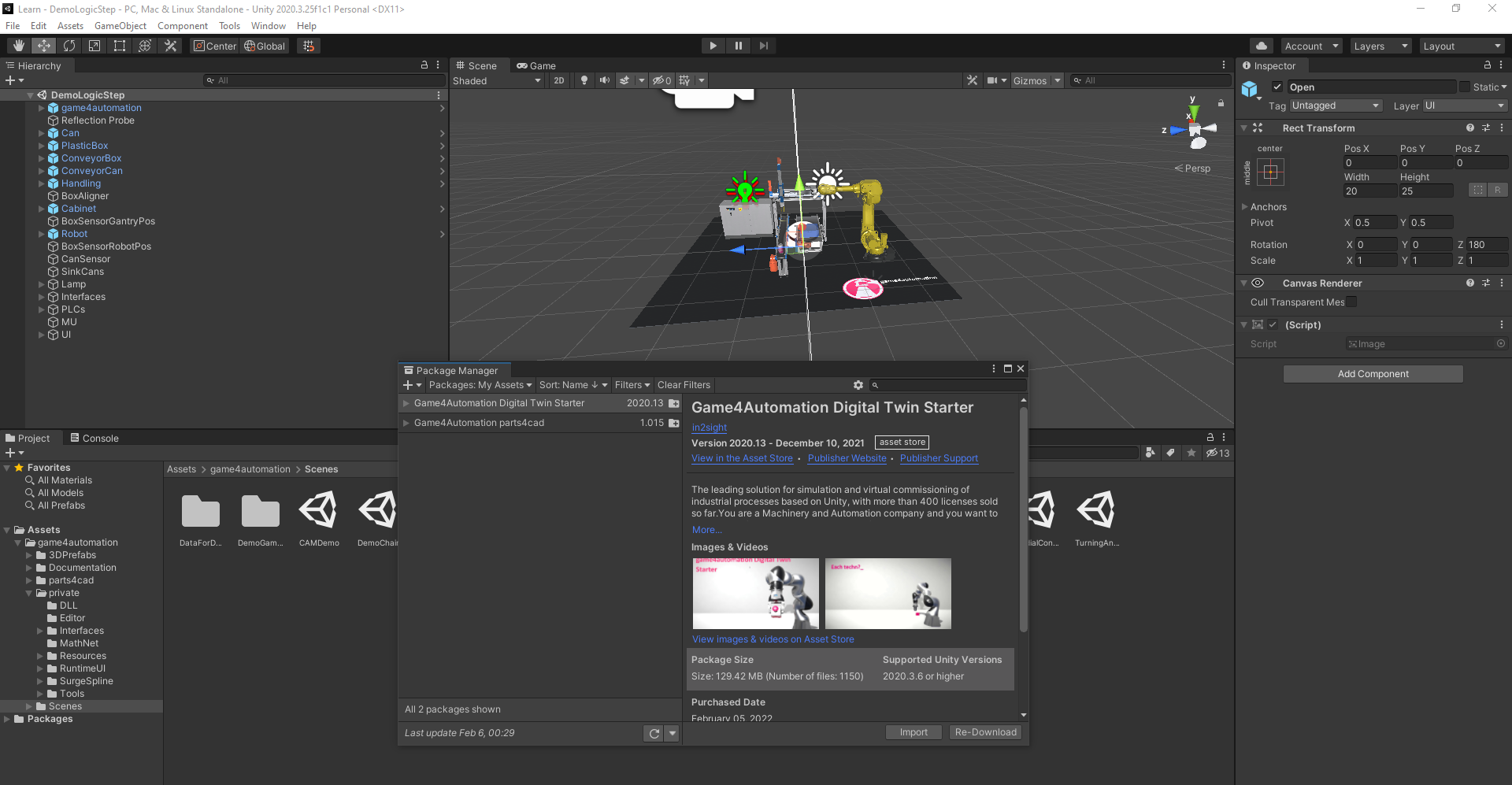
We found the issue. Automatic install script had a bug. Is fixed in the latest release.
Start as a engineering office with game4automation.
Hello all,
we are a modern and new design office near Mundelsheim, Ludwigsburg
We want to start with game4atuomation from February and I have a few questions about it.
Do we need from Unity only the basic version for ca.369 € per year?
Is there already a synchronization for Inventor?
Is there a module for the Raspberry Pi for programming?
Details what we want to do:
We offer our customers so-called Engineering Starter Kits and want to sell first designs for automation projects. In this first phase we do not create any programming or simulations but we want to create a video/animation of the design with Playmaker. Programming and simulation will be added in the next phase. Many of our customers then use these videos for sales and meetings and to make decisions. It's important that we have robots and conveyors available or that we can import them easily. Later in the project we are using the other function too.
Would you say all this would fit well with Game4Automation?
Details on www.conwex.de
Thanks a lot
Greetings
Jan
Good morning,
I think this fits well vor Game4Automation. What do you mean with basic (369€) per year?
You need Unity Professional (about 150€ a month) and Game4Automation Professional (700€ for one license). You can import Inventor CAD data by exporting and importing them via STEP data format.
For the Rasperry PI what kind of a module are you looking for. We have implemented several industrial communication protocolls and if RasperrryPI is talking one of these protocolls communication with Game4Automation Signals would be also. Our source code is open so you could also implement your own custom interface to a rasperry pi.
You can also check our new FAQ if you have more questions:
https://game4automation.com/en/
Best regards
Thomas
hi sir
Assets\game4automation\private\QuickToggle.cs(505,36): error CS0103: The name 'CADStatus' does not exist in the current context
Are you using Professional. Please check your Scripting Define Symbols as described here:
https://game4automation.com/documentation/current/compilerdefines.html
If you are using Starter GAME4AUTOMATION_PROFESSIONAL should not be in the compiler defines.
It has been unable to run successfully
No Spacenavigator installed
UnityEngine.Debug:Log (object)
SpaceNavigatorDriver.SpaceNavigatorWindows:.ctor () (at Assets/game4automation/private/RuntimeUI/SpaceNavigator/Plugins/SpaceNavigatorWindows.cs:58)
SpaceNavigatorDriver.SpaceNavigatorWindows:get_SubInstance () (at Assets/game4automation/private/RuntimeUI/SpaceNavigator/Plugins/SpaceNavigatorWindows.cs:63)
SpaceNavigatorDriver.SpaceNavigator:get_Instance () (at Assets/game4automation/private/RuntimeUI/SpaceNavigator/Plugins/SpaceNavigator.cs:37)
SpaceNavigatorDriver.SpaceNavigator:get_Translation () (at Assets/game4automation/private/RuntimeUI/SpaceNavigator/Plugins/SpaceNavigator.cs:13)
SpaceNavigatorDriver.ViewportController:Update () (at Assets/game4automation/private/RuntimeUI/SpaceNavigator/Editor/ViewportController.cs:72)
UnityEditor.EditorApplication:Internal_CallUpdateFunctions ()
On which platform are you working. Please try deleting the full path
Assets/game4automation/private/RuntimeUI/SpaceNavigator
Customer support service by UserEcho
