Teilen Sie Ihre Erfahrunge und Wünsche mit uns und anderen Usern!
 .3mf import looks weird
.3mf import looks weird
When importing a .3mf file with CADLink, the material always looks strange. Following example is the sample car import with the .3mf (right bottom) and the .step file (left top). I tried changing many settings, own assets and sample assets, but I can't get rid of the strange colors. Am I missing something?
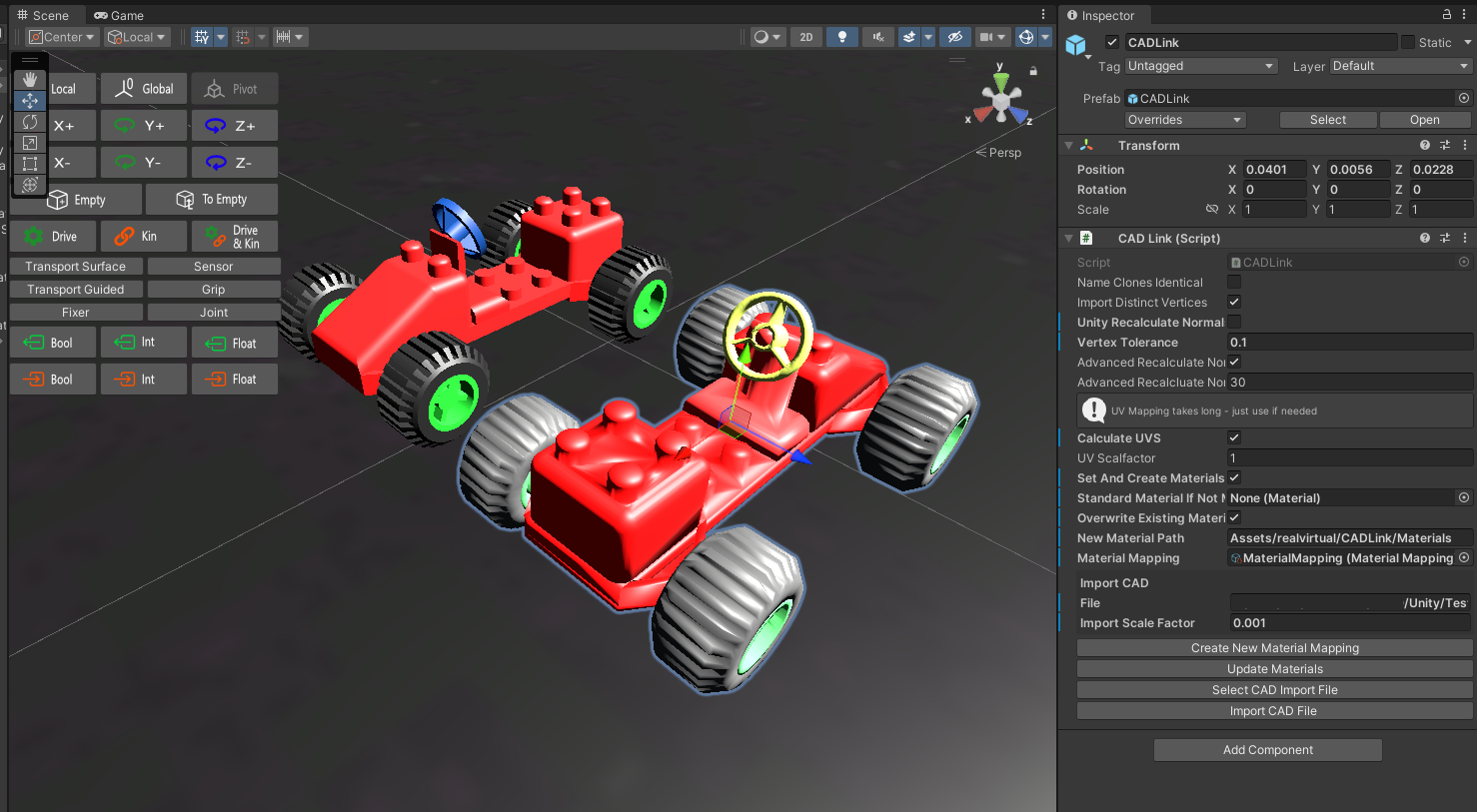

It could be solved easily and will be part of the next release. I will send you in a private message an update package.
 Organizes Reference Infinity Loop Asyncua
Organizes Reference Infinity Loop Asyncua
When loading the nodes from a asyncua server with an organizes refrence the loading ends in an infinity loop. I have the organizes refrence assigned to an object (against the standard), i dont know if this is the problem. When i use the client in the documentation to test the connection the client is working properly.
 Asyncua Unsupported Communciation
Asyncua Unsupported Communciation
I get an error when trying to connect to an asyncua server. The client OPCUA4Unity is loading infinite and the Error Requested Value False was not found shows up:
asyncua.ua.uaerrors._base.UaError: Unsupported message type b'\x16\x03\x01'
License: The evaluation period is expired
When using your plugin I first ran into the problem that I had too many subscriptions for 1 PLC so I changed the OPCUAConnection class to the native OpcClient connection so I could use the Opc.UaFx.Client approach of adding multiple nodes to 1 subscription instead of making 1 subscription for every node.
After I did this I started getting the following error:
LicenseException: The evaluation period is expired, you need to purchase a license to take further use of the OPC UA Framework Advanced. Please contact your support!
What should I do in order to fix this error, cause the connection stops working after a while.
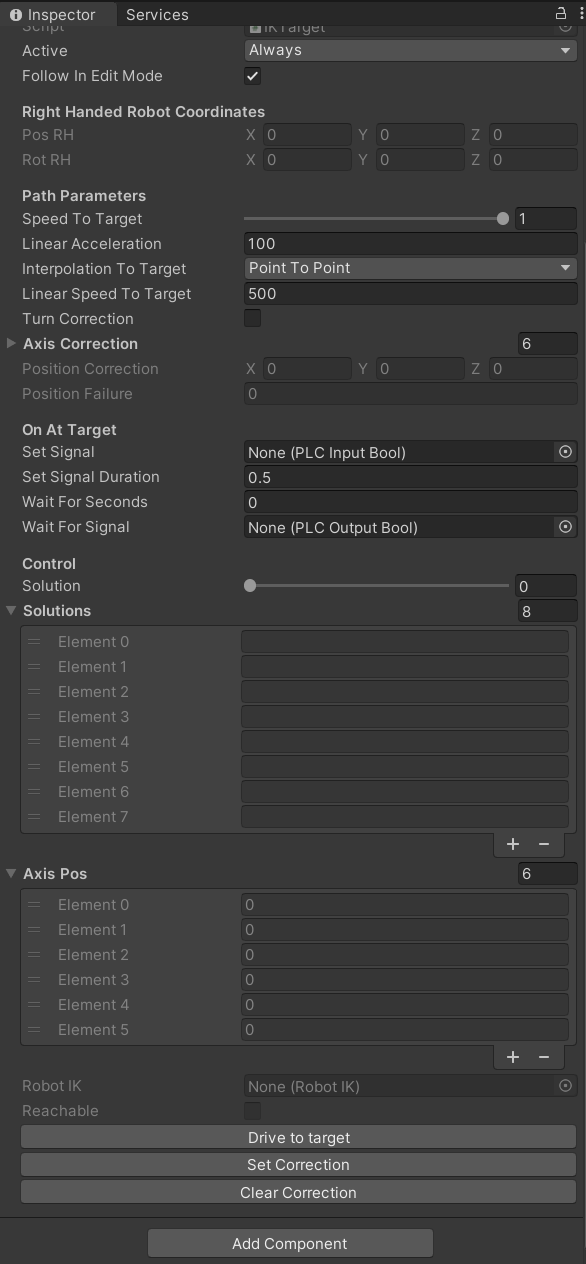
Targets not working after update to latest version
Hello folks!
Since I updated to version 2021.16.2412 I can no longer define working targets. They look like
on the screenshot. Any idea what's happening?
Regards,
Bear
Hi,
I have checked your scene. Please update to our latest version 2021.17 and the problem should be fixed. Let me know if there are any other problems.
Regards
Christin
Connection with hololens 2
is it possible to use the hololens 2, robo dk and realvirtual.io, so that I can manipulate the robot in augmented reality using the glasses (using my hands to move the robot or use gestures)?
Direction vector disappeared
Hello,
I used to have the purple direction vector of a drive visible in the scene window when selecting a component with a drive, but now it disappeared. Do you know how I can get it back?
Hi,
please check if the gizmos are enabled and check the scale of them.
Regards Christin
Subscription not working
Hello, we found some problem using the subscription method. Initially we used the polling method (not recommended), but eventually we found out that this starts failing when we try to capture values from different servers at the same time.
Here is the project attached with some debug lines added. We are using Integration Objects OPC UA server to test the subscription.
realvirtual's simulink interface
您的文档描述了 realvirtual 的 simulink 接口,但我找不到相关块,并且电子邮件显示无法发送,我如何获取应用程序?谢谢!
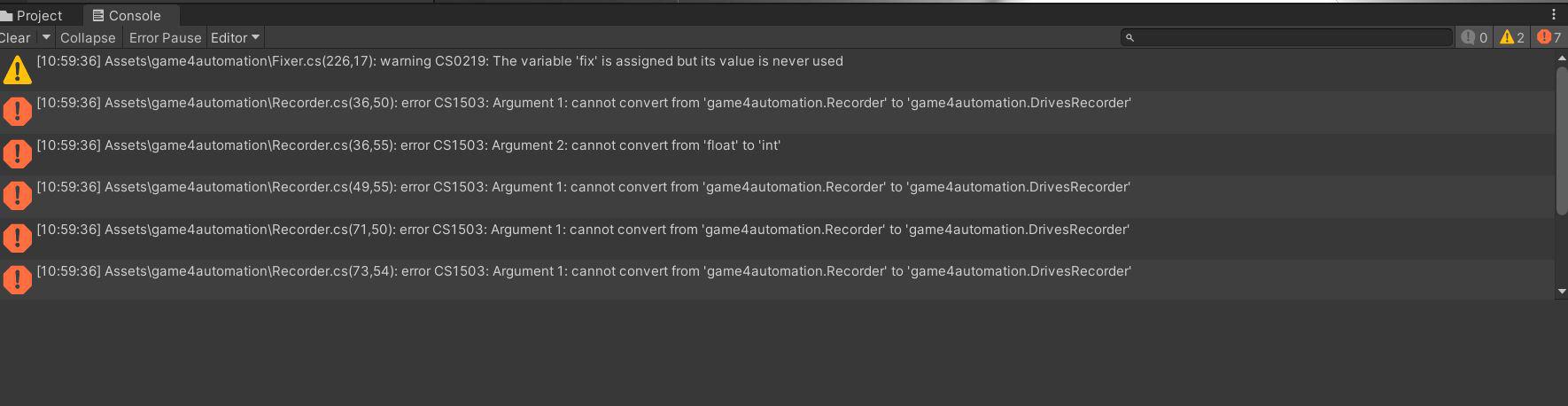
Errors after Realvirtual.io update to the latest version (2021.16)
Hi,
after updating to the latest Realvirtual.io version, I get the following errors in my project:
Can you help fixing them?
EDIT: I already fixed it (deleted old "recorder.cs")!
Please delete the Recorder.cs script in the game4automation folder. This functionality has been replaced by the script DrivesRecorder.cs. With
an update of an existing project, obsolete scripts are not automatically deleted. We will check here whether we can automate this.
this automatically.
Customer support service by UserEcho

{kind=link}