Teilen Sie Ihre Erfahrunge und Wünsche mit uns und anderen Usern!

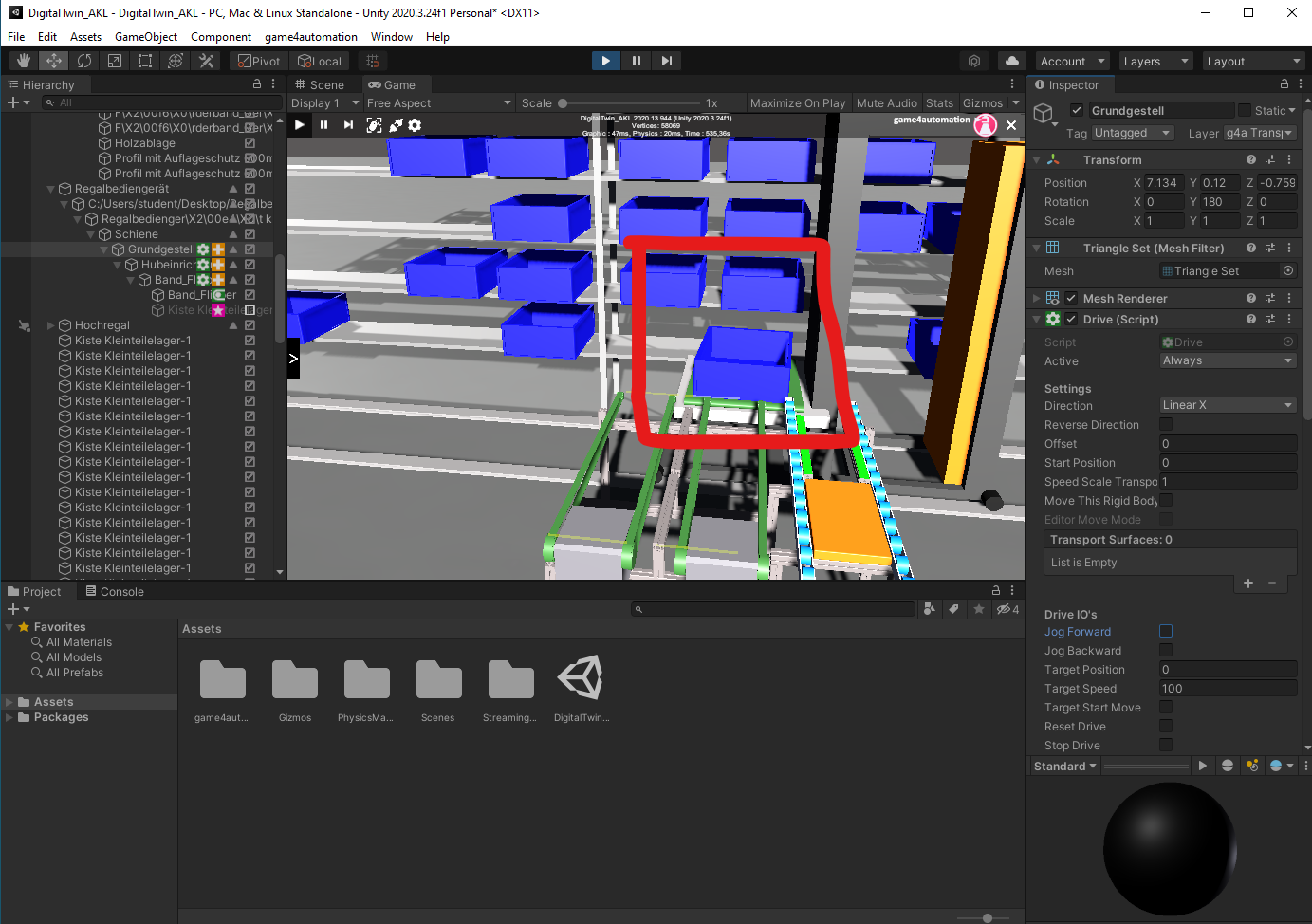
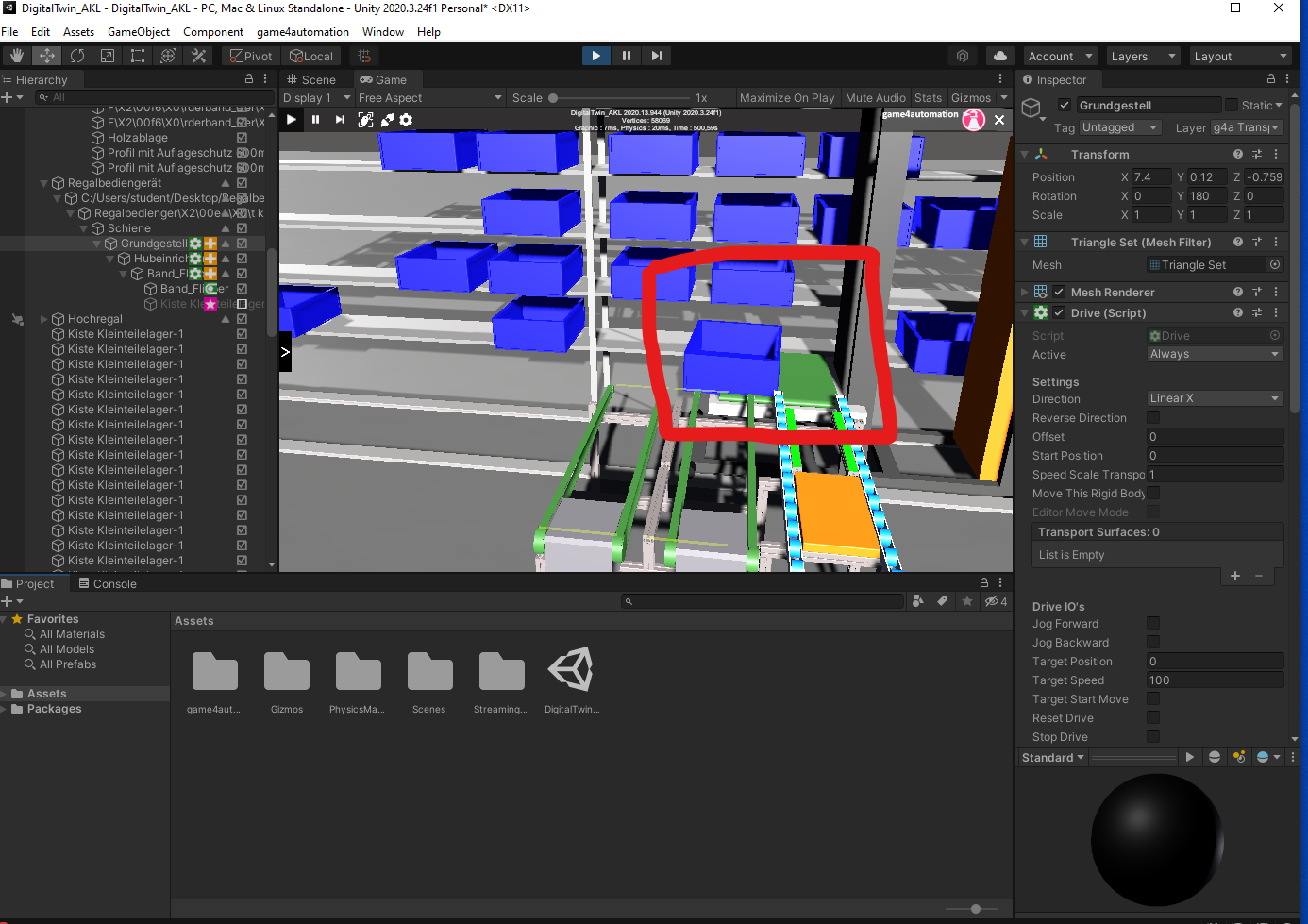
 MU not moving properly
MU not moving properly
Hello,
MU is sitting on transport surface. Moving up and down is possible but moving to the left and right does not cause the MU to follow (see pictures). Any ideas?
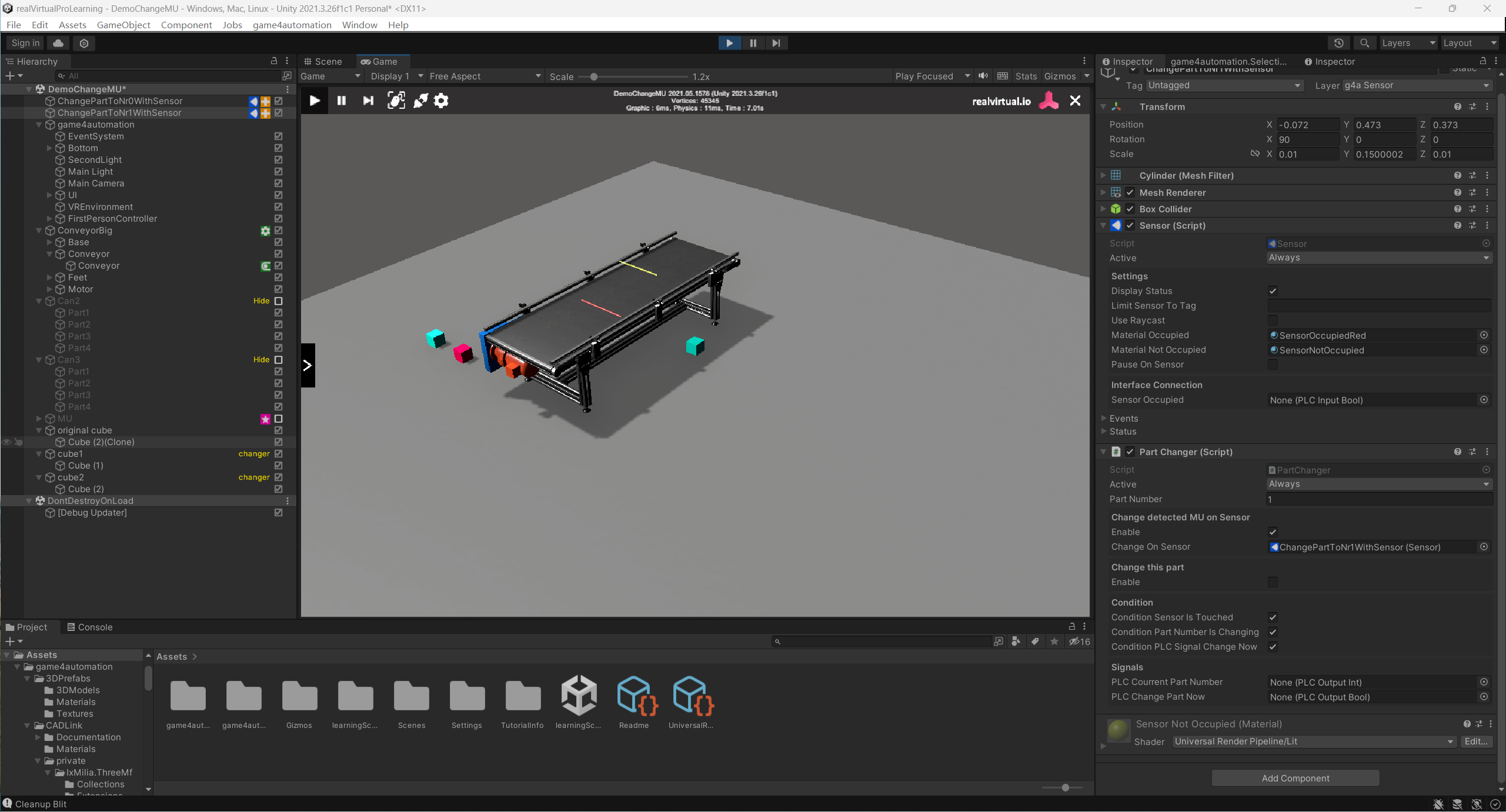
PartChanger unexpected situation
question1:
“part changer” component erro
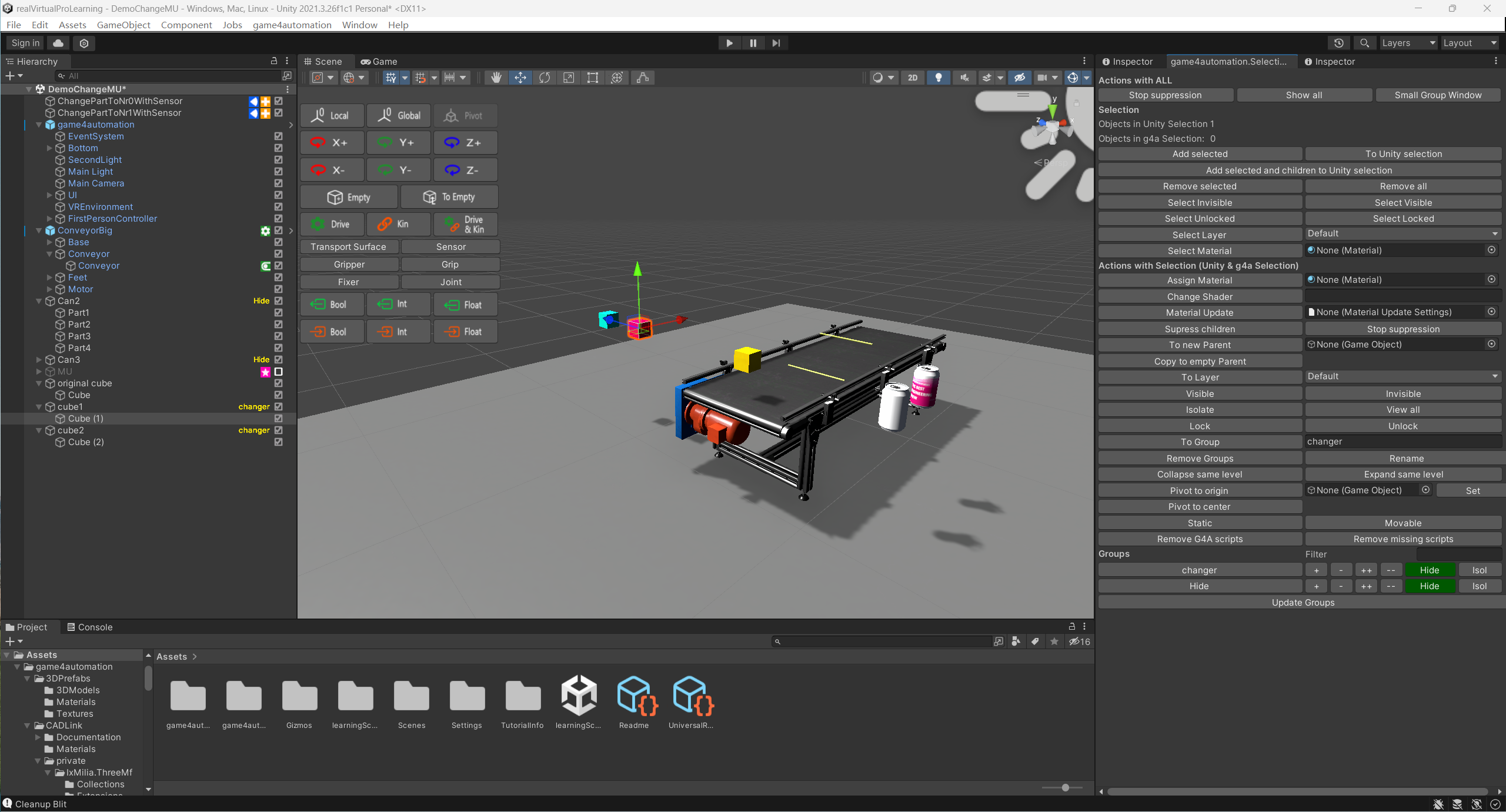
my original cube(yellow one) has the MU scirpt,and I have set two MU appearences :cube1(red),cube2(blue).They both have rigidbody and collider,and are on MU layer.In this DemoChangeMU Scene,I just set those cans and MU active state to false,trying to repalce them with some cubes.
HERE is the problem:at the moment that yellow cube been detected by sensor0,it immediately jumped to a strange point as the picture shown,and the sensor0 is still high(keeping red) even those two objects have separated(in this scene the sensors do not use raycast but a collider ).
question2:
In this same demoscene,Can2 and Can3 are active in Scene mode.But when I click the play button,active state of Can2 and Can3 are immediately become false automatically.I tried to find the reason,but I did not find any script for this change.And I thought maybe it is because the “Group” ,so I also put my cube1 and cube2 to a group named changer as the picture shown.BUT,when I click the play button
,my cubes are still visible.I cant figure it out why.
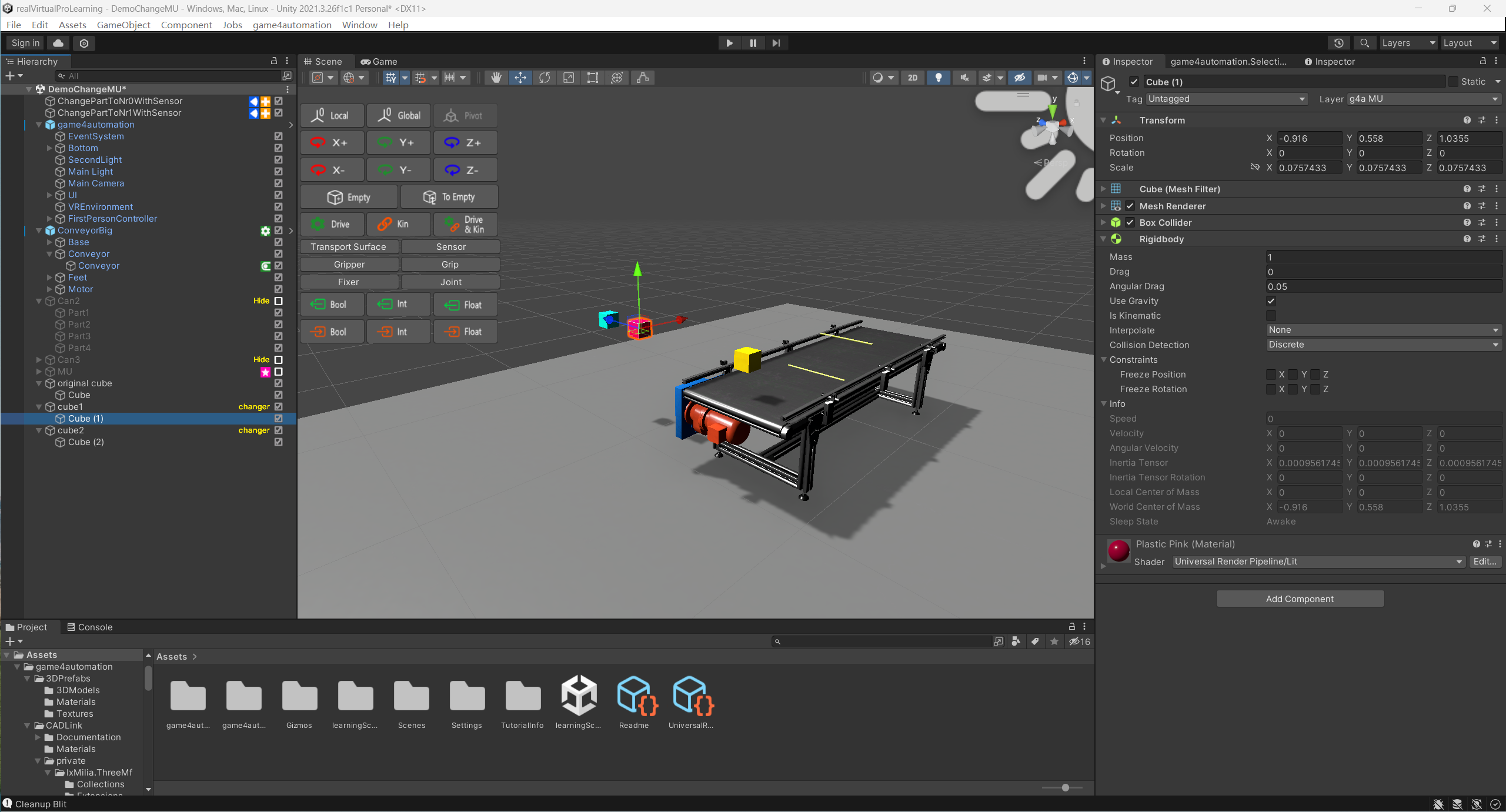
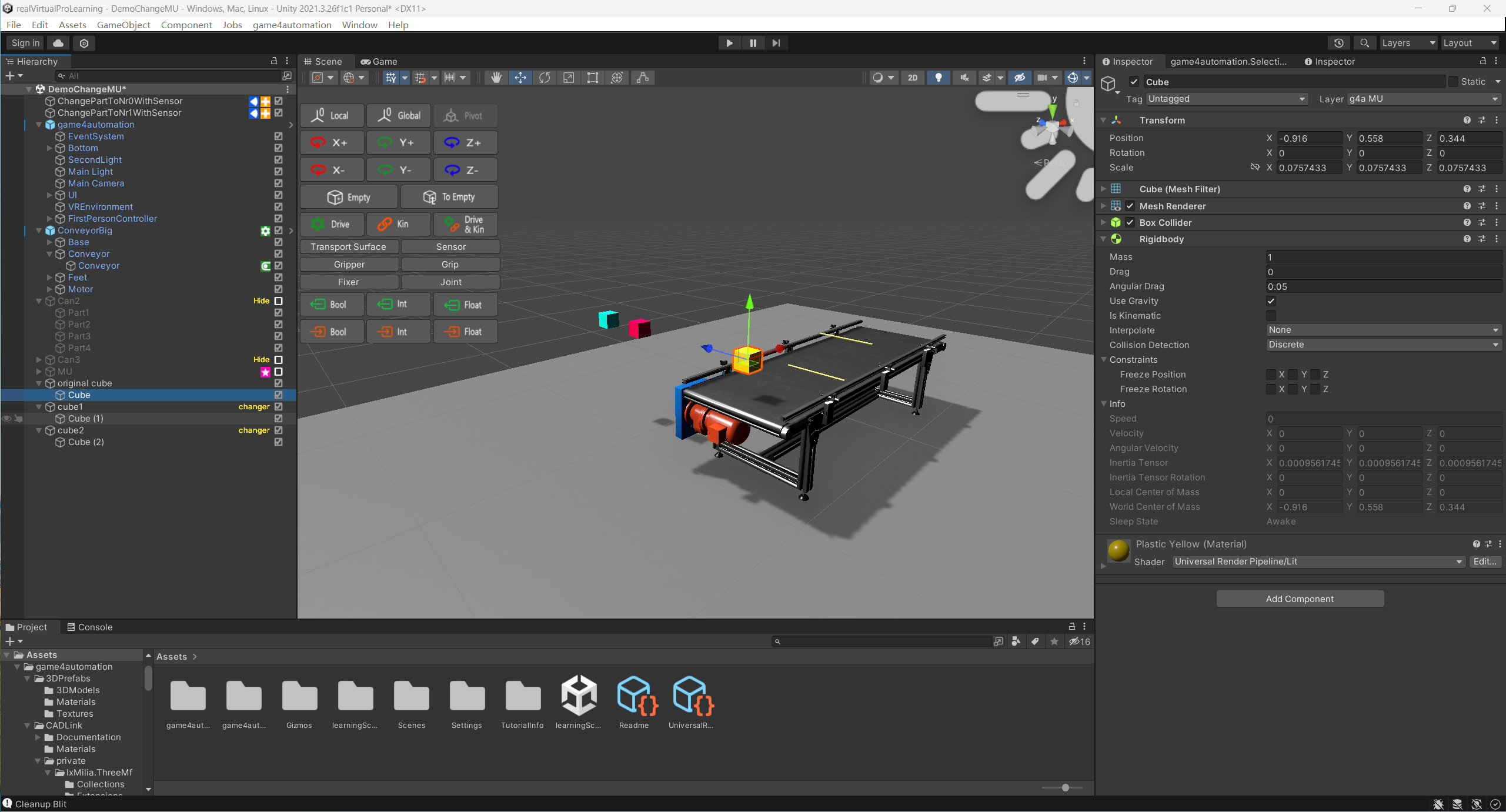
Scene and gamemode are different
Hello,
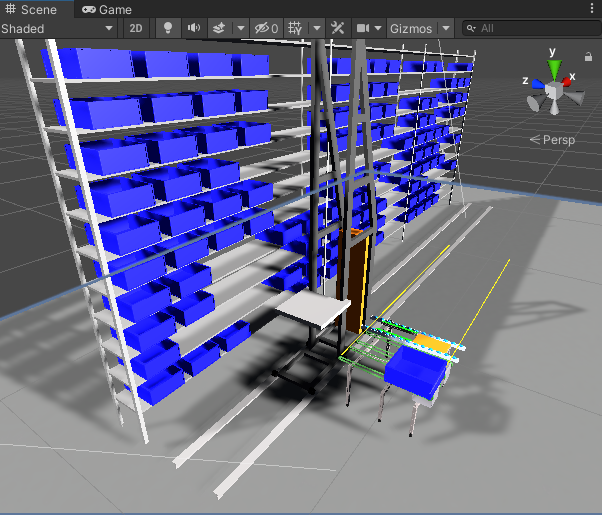
can someone explain, why the box does get bigger when switching in gamemode? How can i avoid it?
First picture shows scene mode (how i want it to look like), second shows gamemode.
why I cant change PLC input signal by sensor?
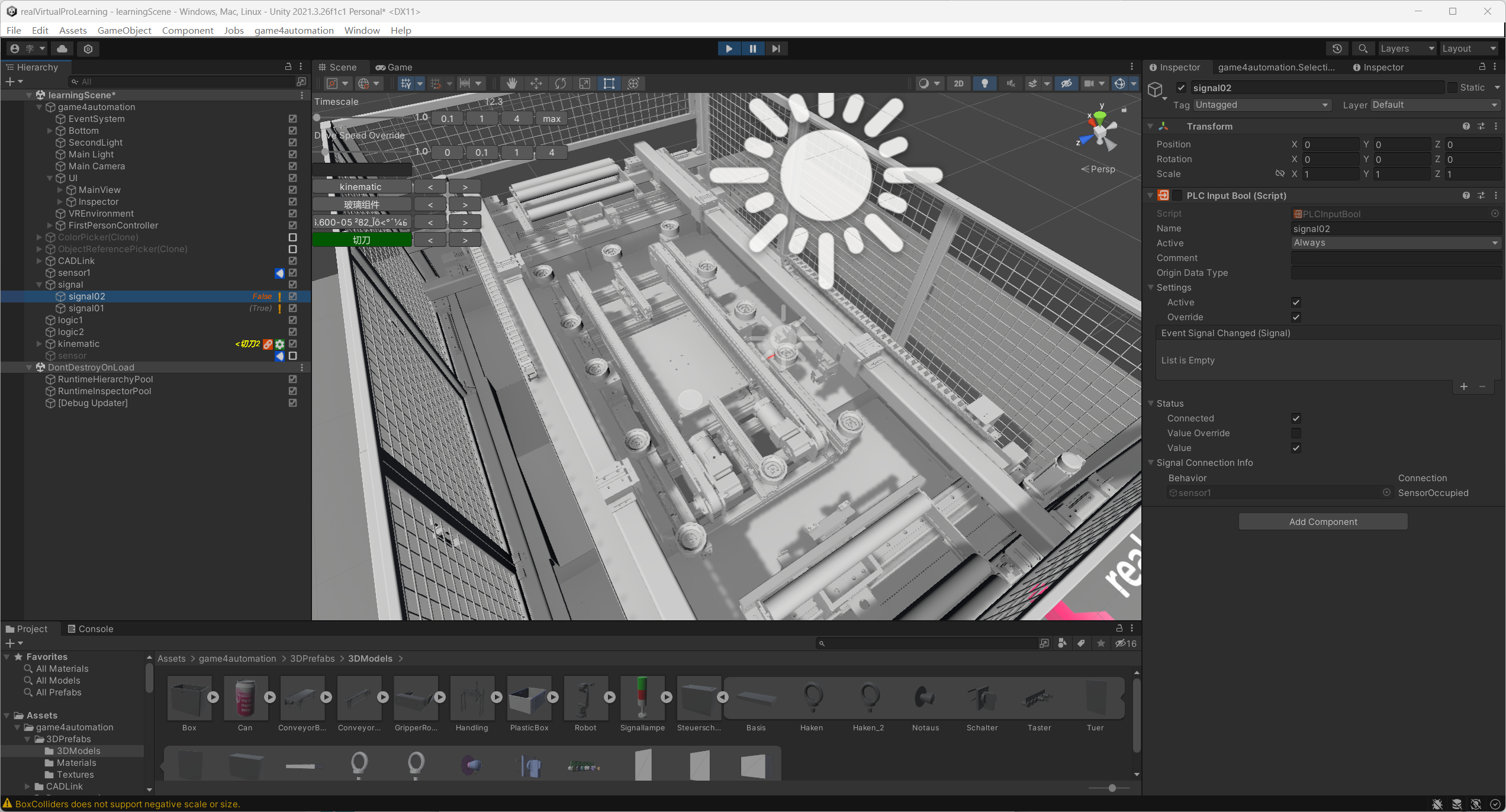
Here is my problem.I have 2 signals:the “signal01” is to control object01 to move or to stop,and the “signal02” is to control another object02. I set a sensor called “sensor01” ,when object01 move to a certain place,the “sensor01” could detect it .However,it failed to change “signal02”,which is still false.
I have put relevant settings in those pictures below,can someone help me to resolve this strange problem?I have suffered from this one for nearly one week.
sensor cannot work normally
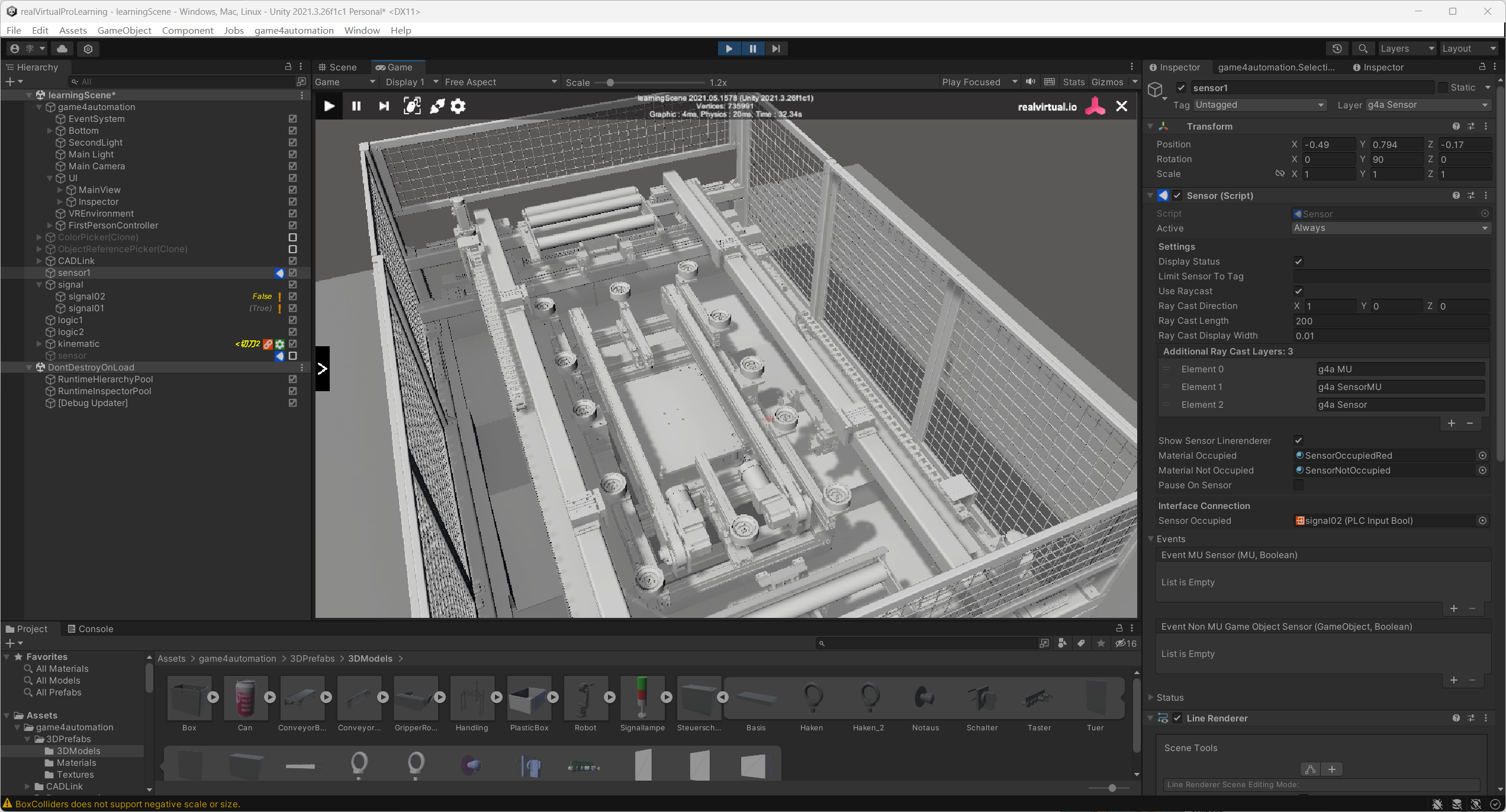
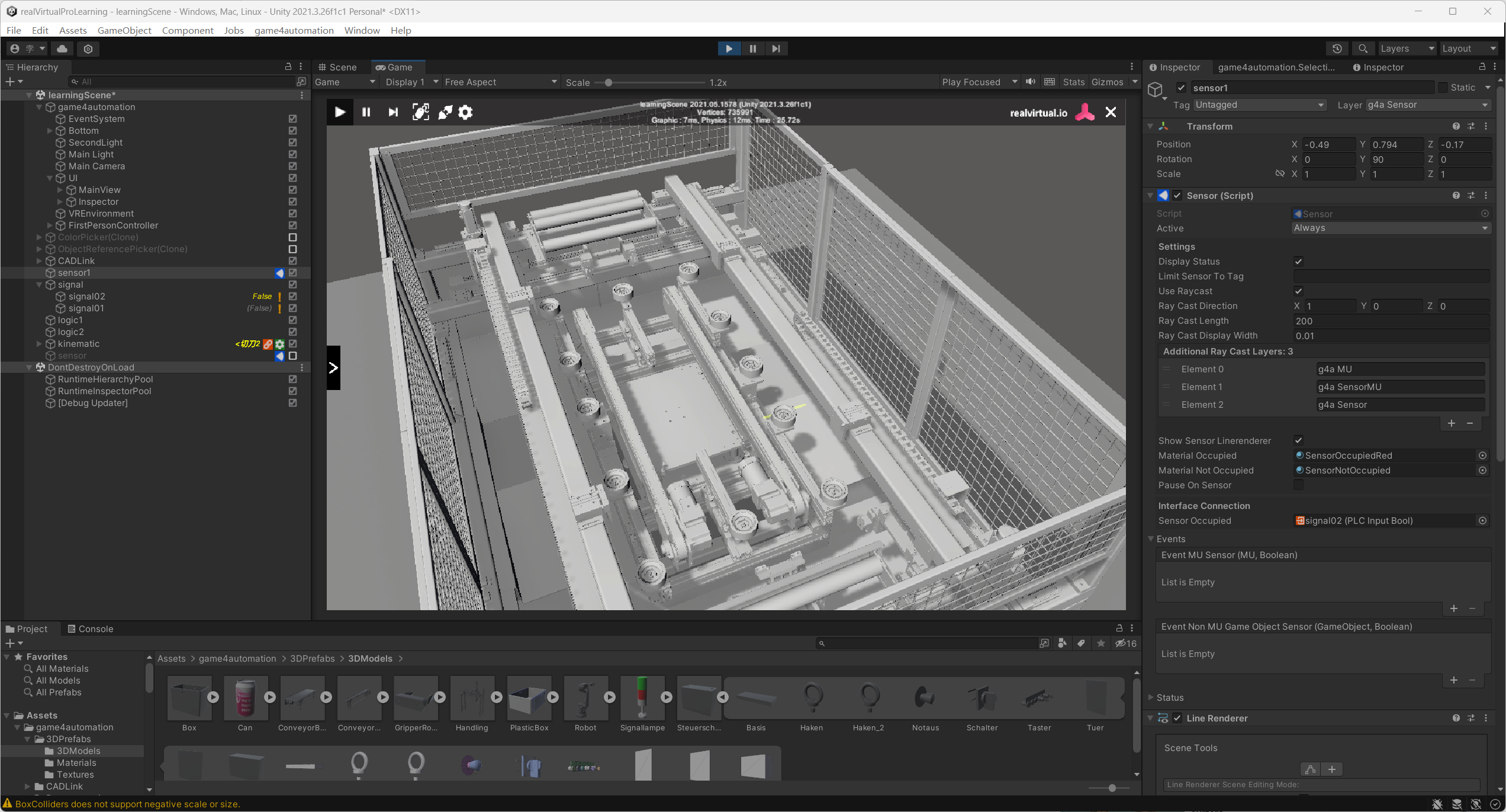
I meet a simple but truly strange problem.In the picture below,I‘m using a sensor to detect if something pass through.However,even I have put the Steuerschrank into MU layer,my sensor cannot detect it.In other occasion,I use the prefab--cans,this sensor could work normally.someone could help me?I have spend nearly one week on this problem.
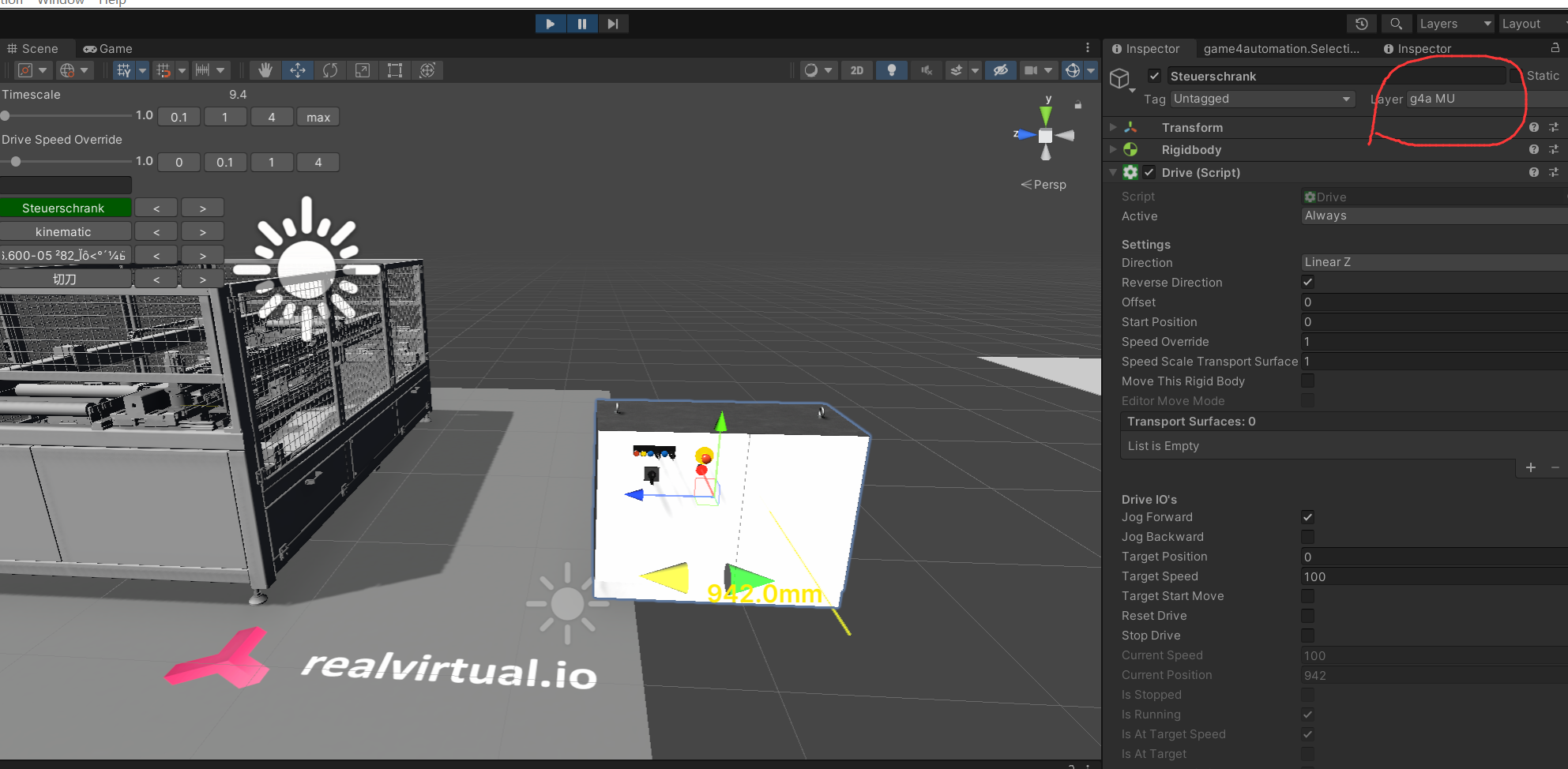

With a Raycast based Sensor you don't need to use colliders but you need to define the layers where the Raycast is sending to. It is the same Layer as the Sensor is and additional Layers which you can define.
For a non Raycast (Box Collider) based Sensor - the Sensor should be normally on the layer rvSensor. Please also check the doc information about the collsission matrix for colliders.

 Assertion failed on expression: 'CompareApproximately(SqrMagnitude(result), 1.0F)'
Assertion failed on expression: 'CompareApproximately(SqrMagnitude(result), 1.0F)'
I played the project on the "Game" screen. However, when I click the right mouse button, I get the following error and nothing is rendered on the "Game" screen.
- Assertion failed on expression: 'CompareApproximately(SqrMagnitude(result), 1.0F)'
UnityEngine.Quaternion:Internal_FromEulerRad (UnityEngine.Vector3)
- transform.position assign attempt for 'Main Camera' is not valid. Input position is { NaN, NaN, NaN }.
UnityEngine.Transform:set_position (UnityEngine.Vector3)
Ubuntu22.04, Unity 2022.3.7f1, realvirtual.io Digital Twin Professional 2022 Ver.2022.6.0Ubuntu22.04, Unity 2022.3.7f1, realvirtual.io Digital Twin Professional 2022 Ver.2022.6.0
Got it - Linux is not supporting Screen.dpi. You should insert this in line 456 in SceneMouseNavigation. It will be part of the next release in 3-4 weeks, for the moment you should change the code manually.
#if (UNITY_EDTOR_LINUX || UNITY_STANDALONE_LINUX)
DPIScale = 1;
#else
DPIScale = 144/Screen.dpi;
#endif
 Creating a digital twin
Creating a digital twin
Hello friends,
i need some help at creating a digital twin of a logistic system. The Box should go over the transport system. Then when it arrives at the end (detected by Sensor) the Plattform (white) in the middle should take it and put it in the shelf. It has a OPC UA connection and the various variables are available. I need some help appling this in unity bc i'm a beginner and not know all of the components.
Fehlermeldung Transportsurface
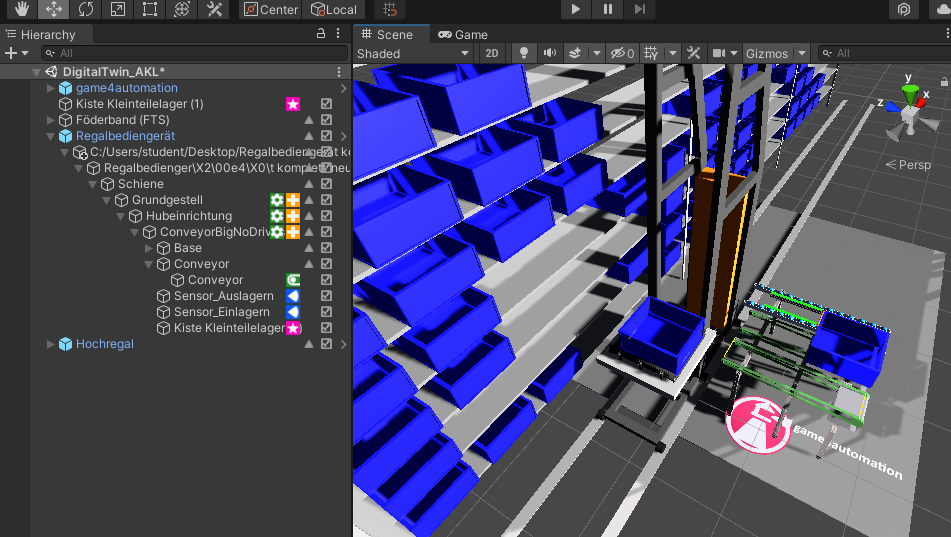
Hallo,
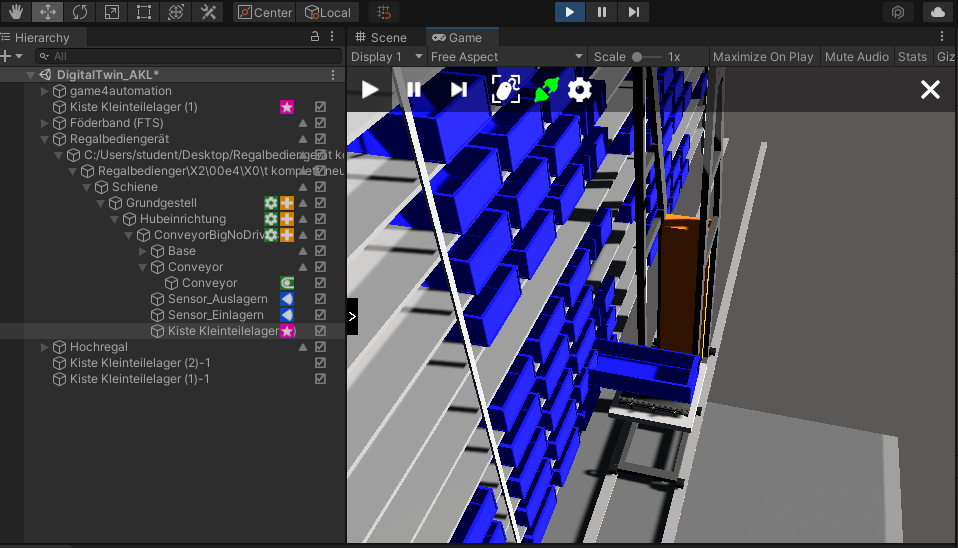
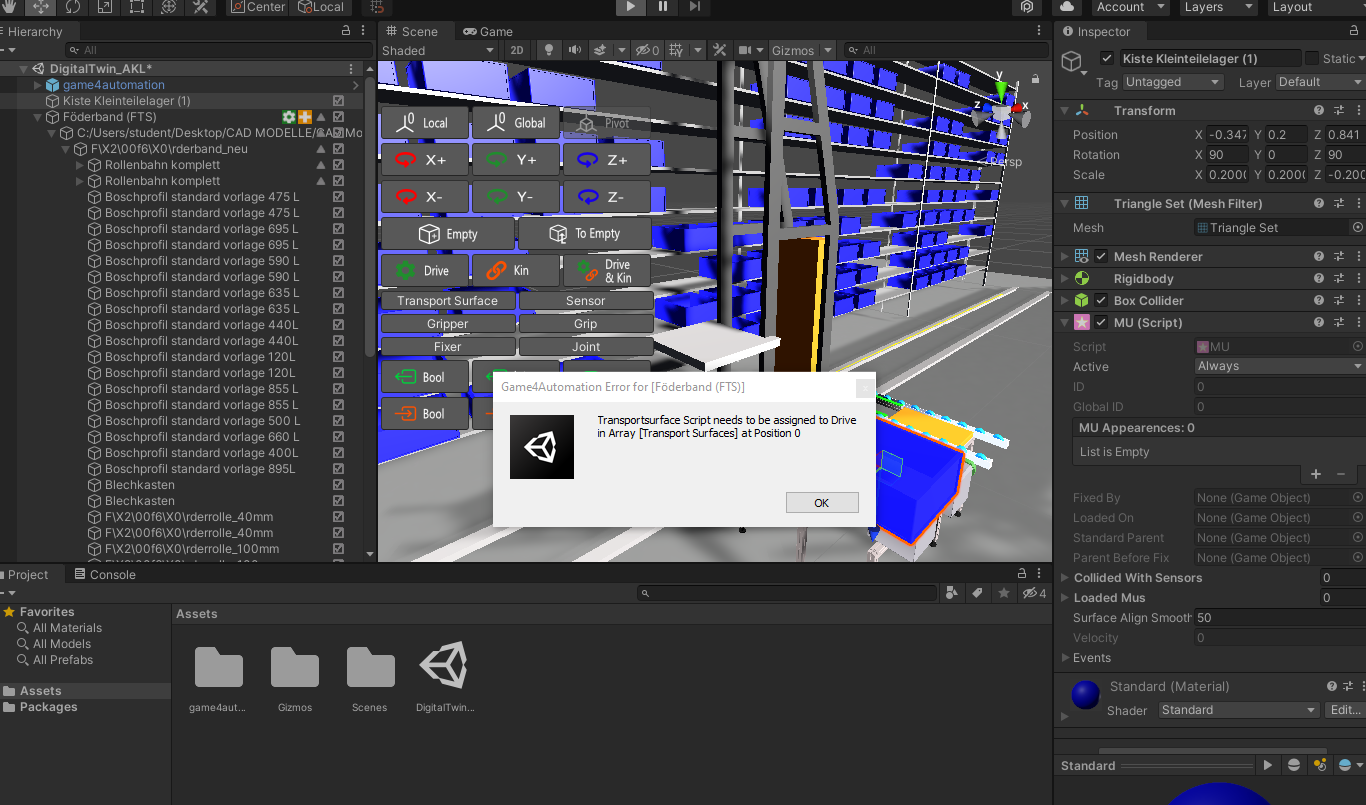
Ich bin gerade dabei einen Digitalen Zwilling eines automatischen Kleinlagers zu erstellen. Nun bekomme ich folgende Fehlermeldung wenn ich in den Game Modus gehen möchte. Ich vermute ich habe irgendwo ein Drive zu wenig. Könnt ihr mir sagen wo?
Darüber hinaus fällt meine Kiste ins unendliche und bleibt nicht auf dem Föderband stehen. Wie "befestige" ich die Position?
P.S.: Ich bin noch Anfängerin in diesem Gebiet und bin für jede Hilfe dankbar.
Error importing the Package Ver.2022.6.0
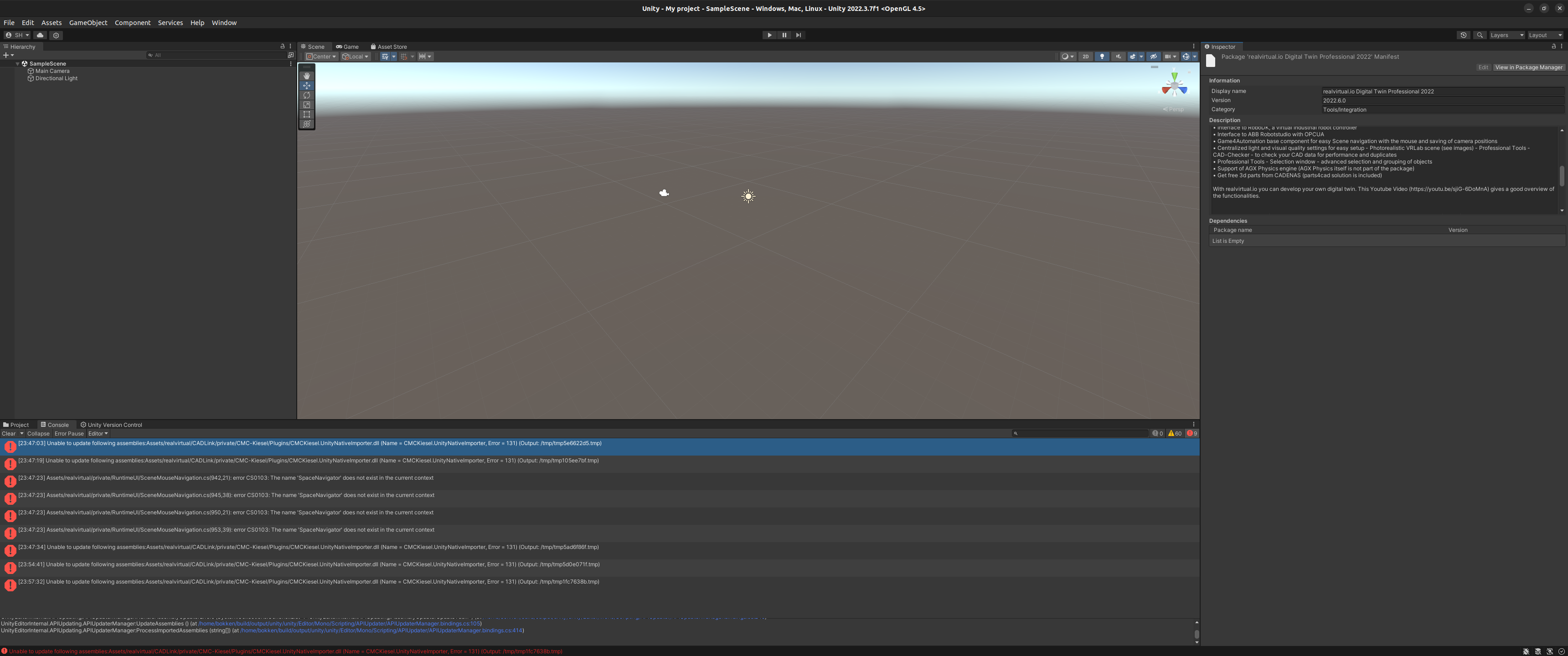
I get this error when I import the package to Unity:
Unable to update following assemblies:Assets/realvirtual/CADLink/private/CMC-Kiesel/Plugins/CMCKiesel.UnityNativeImporter.dll (Name = CMCKiesel.UnityNativeImporter, Error = 131
Ubuntu22.04, Unity 2022.3.7f1, realvirtual.io Digital Twin Professional 2022 Ver.2022.6.0
We changed and adopted all compile switches and Settings to Unity Editor on Linux. It will be in a few hours as a patch on the Unity Asset store. Please note, that SpaceNavigator, some special Interfaces (like SHM based for Simit) and CAD Step Import won't be available on Linux.
Interface losing connection after certain amount of time
When connecting the OPCUA_Interface with a PLC I lose connection with the PLC after a certain amount of time. One kicks me out after 2 min, another after 15 min (2 different connections).
The interface seems not to notice the disconnect because the value of isConnected in the interface stays on true but if I check the connected clients to the PLC the interface is gone (which was there on startup).
Reading a value after the disconnect on node level gives me the status value: Connection error
I import the nodes with the editor button but remove all nodes I dont need. And I dont continuously get new values on the nodes I keep. I can have the same values (no changes) for long periods of time.
Does the Interface only keeps the connection alive if the values continuously update or is something else going wrong?
Yes I understand but the used Library gives us no direct information about disconnection events. And I don't know exactly in your case who is closing the communication when nothing happens - is it the client or the server. I am closing this issue because for the moment we don't have a better solution.
Customer support service by UserEcho
