Teilen Sie Ihre Erfahrunge und Wünsche mit uns und anderen Usern!
 Siemens Telegram
Siemens Telegram
Hi,
I am using realvirtual.io pro and Unity version 2022.3.12f1. I received a question from a customer asking if I can perform simulations where Siemens telegrams are used.
Is it possible, and which is the best interface to use for this?
They also mentioned that the speed needs to be less than 4ms. This is all new to me, so I would like your opinion.
Telegrams:
Telegram 1, Frequency converters
Telegram 105, Servos
Telegram 83, Pulse encoders
Telegram 750, Additional Torque Data

S7 Interface 100% CPU when no connection to PLC is available
How can we prevent a 100% CPU usage, when no plc is connected ?
My setup requires PLC to come in and out of the network, and every time the PLC goes out of the network, the CPU reaches 100% within 2 minutes.

Ok will check this afternoon and send you here with a private message a new beta script.

How to use drive action in behavior subgraphs
I want to use a Drive action on a behavior subgraph, but I don't know when and how to instantiate the drive. With drive on the blackboard of the subgraph, the drive will not be instantiated.
maingraph

subgraph

NullReferenceException: Object reference not set to an instance of an object
realvirtual.DriveToAction.OnStart () (at Assets/realvirtual/BehaviorGraph/DriveToAction.cs:27)
I have to override Axis in the main graph to create an instance of the drive:

But this is not what I want. I want to use the subgraph for a specific drive, without telling the subgraph all the time which drive. How can I create it?
Workflow for updating CAD model
I have created a scene based on a prefab by importing a CAD model. I decorated this prefab by adding groups of objects and colliders. Furthermore I created a kinematic structure that references to the groups.
Later on my CAD model had some changes and I wanted to reimport the CAD model. After the reimport all groups and colliders are gone. And I was also not able to undo the reimport ...
Is this how it should work? What workflow should I use to reimport CAD models that prevents loosing groups and colliders?

S7 interface - no signal values even though address is correct and connection can be made
I'm currently working on a project with a 1518TF-4 CPU which we activated on an IPC. I can establish a connection between Unity and the PLC but the signals then doesn't recieve any values and stay 0 or FALSE.
The signals I need access for are inside a DB. I've created the Signals in the S7 interface by hand and I made sure the address is correct.
Example of a signal I created:
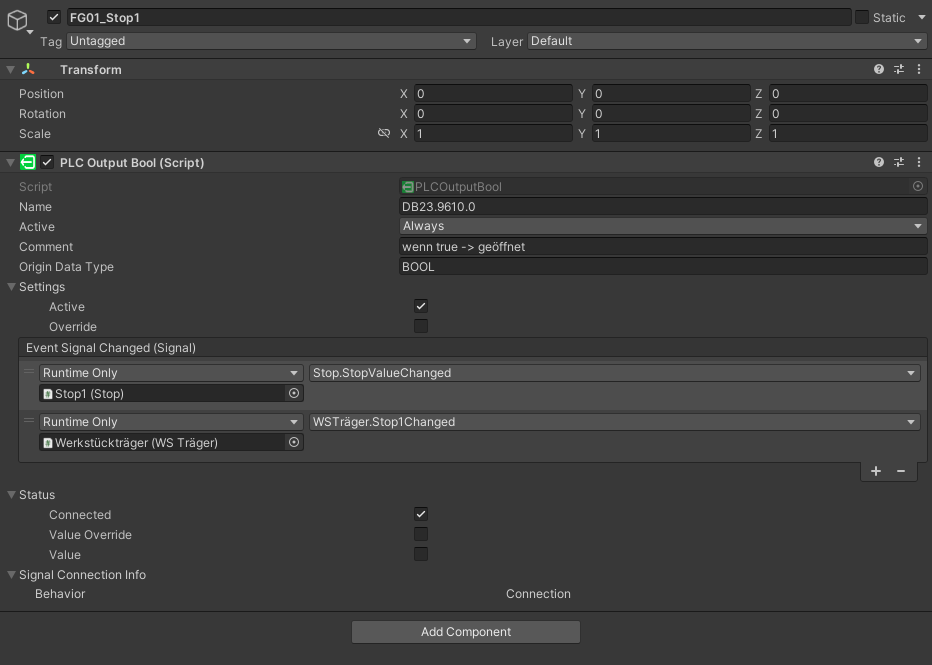
I also made sure, that all the settings specified here S7 TCP | realvirtual.io are done. So that there's full access and PUT/GET communication is allowed. I tried establishing a connection to signals inside a DB and Q signals. My only goal is to read signals, no need to write them.
I've tried it with realvirtual 2022.19.6148 and 2022.15.5414. The Unity version I'm using is 2022.3.39. I also tried a simple test siemens project but that also didn't work.
I know that it already worked at some point last year, but I can't figure out why it doesn't anymore.
This is what my S7 config looks like:
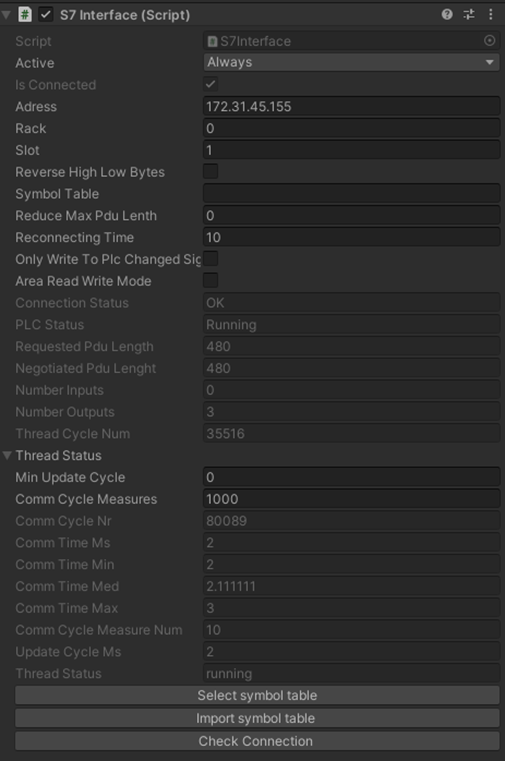
I've also tried all kinds of varieties of settings, so different values for max pdu length, with reverse high low bytes and more.
I don't know if this has any relevance but I did notice that sometimes, when reverse high low bytes is activated, some Bool signals randomly jump between FALSE and TRUE, some Ints sometimes jump to 265 and back to 0 and Floats will do the same to 2.350989E-38.
Does anyone have an idea, why I cannot get the signal values in Unity? I've run out of ideas.
IK Limits
I'm working on some digital twin of a 6 axis arm robot and would like to use the IK.
I actually have something that's currently working fine, but we've found out that some of the joints are reverse and that one of them needs an offset. However - once I fix all that the IK breaks.
I saw in the documentation that there are some strict limitations.
I just wanted to understand where am I still free to play around, and if it's possible to fix the IK somehow:
1. Can I reverse the joint's direction (the bottom two are fine but the rest need reversing)?
2. Can I add an offset so that when the 3rd joint is at 0 angle the robot will be at 90 degrees?
3. If not - is there some recommended method to convert the values so that they would fit the real values?
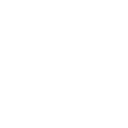
 Pink Module
Pink Module
Dear Sir/Madam,
When i open the sample demo and i found the demo has became pink color.
I tried to reinstall the unity and it is still the same.
Can you help to advice on it? Thanks
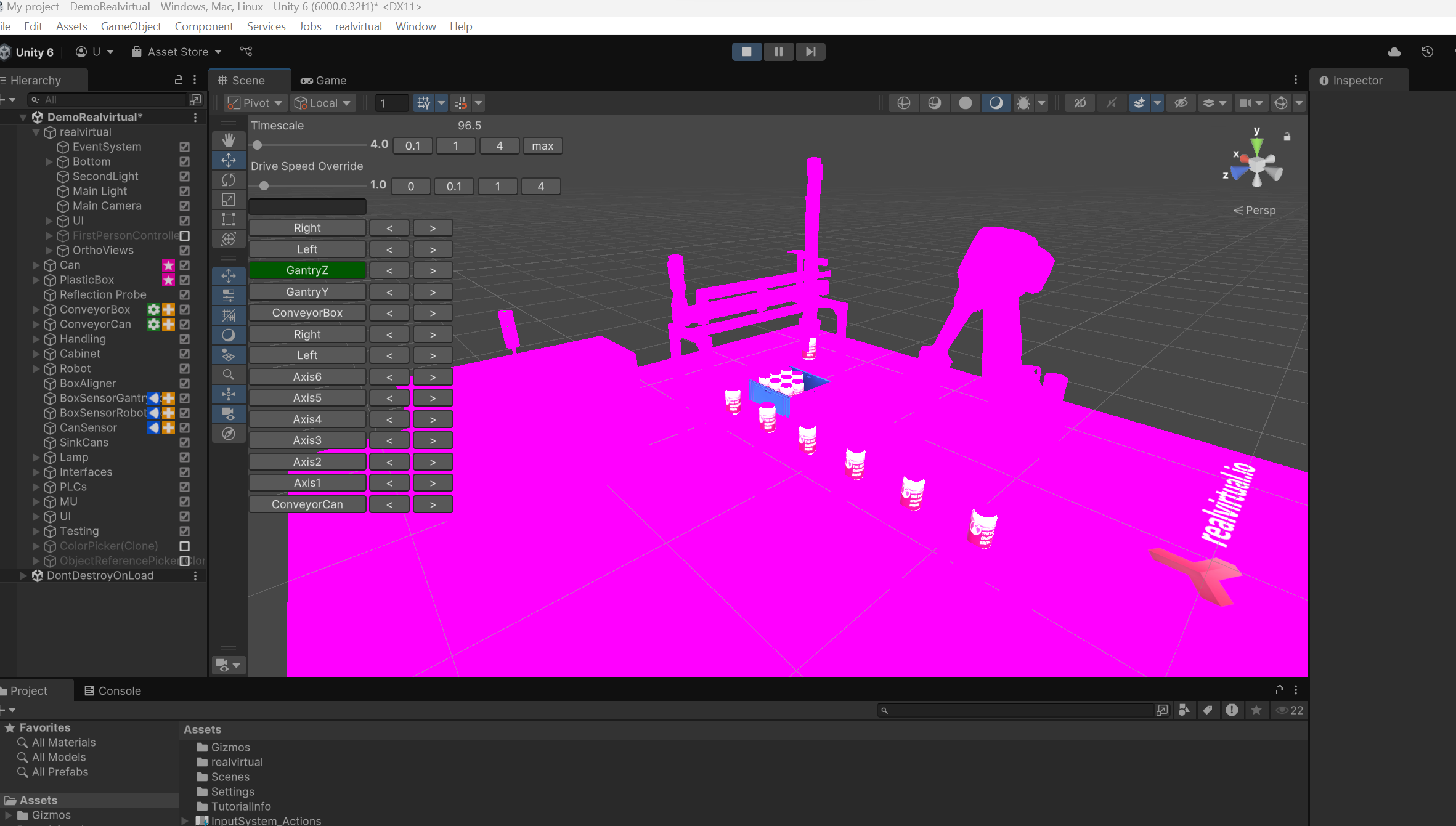
 Add Box Collider on on curve safeguard
Add Box Collider on on curve safeguard
Hi there,
May I know how do i add box collider on a curve safeguard so that i can ensure my carton box move within the conveyor?
Thanks.

About the problem of reconnecting the s7plc to the caton
Hello, I have a question. If there are a lot of devices with a lot of IP, the PLC that is not turned on will be reconnected over time, and reconnecting the PLC over time will cause the program to stall, which will greatly affect the use. May I ask how to solve the problem of reconnecting over and over?
Hi, there would be changes in the code needed. Currently we don't assume that devices are off and on during simulation. The source code is open you would need to change the way how reconnection is done - maybe by using the new Awaitable System in Unity6
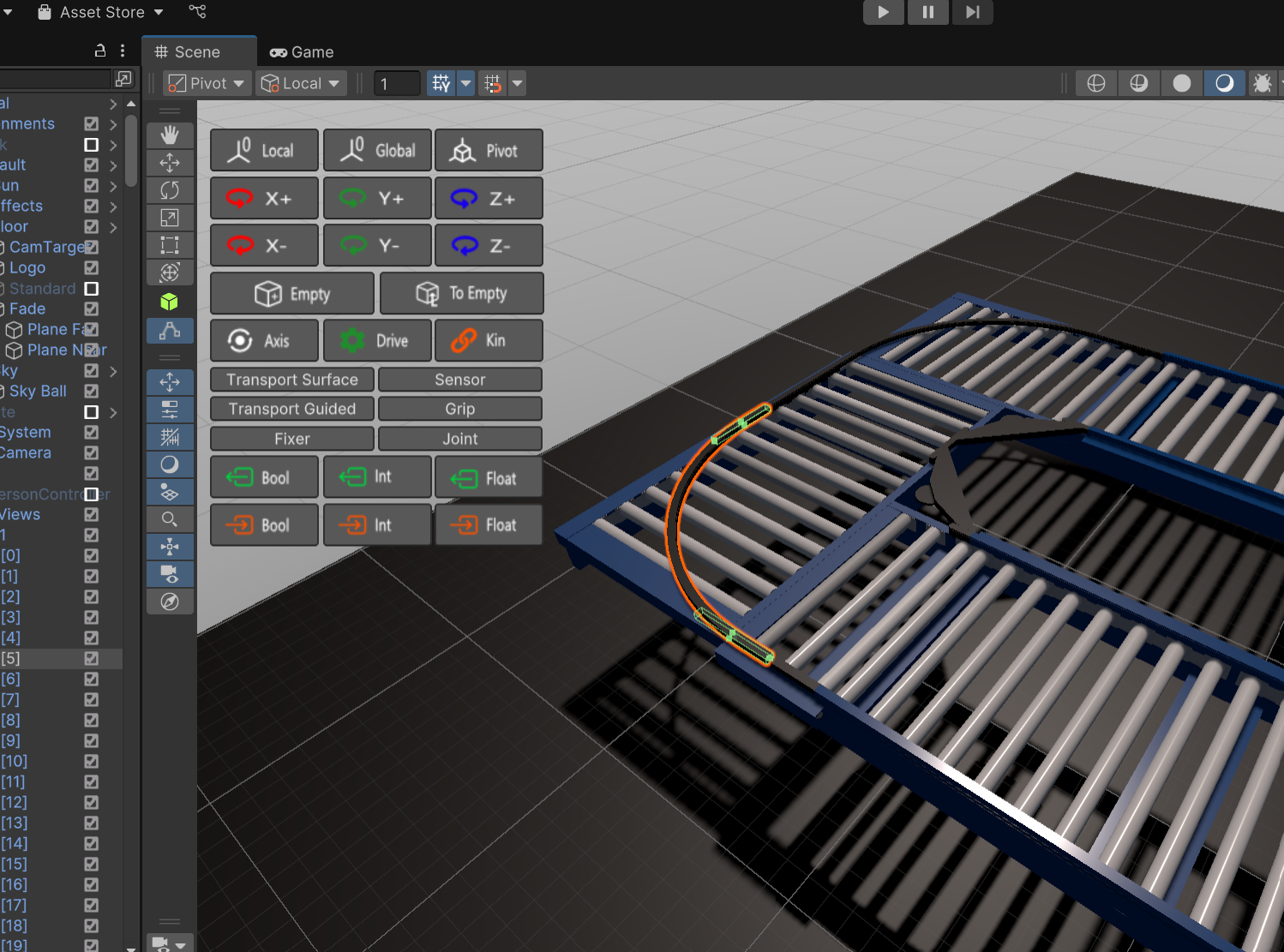
Questions about the use of s7 PLC
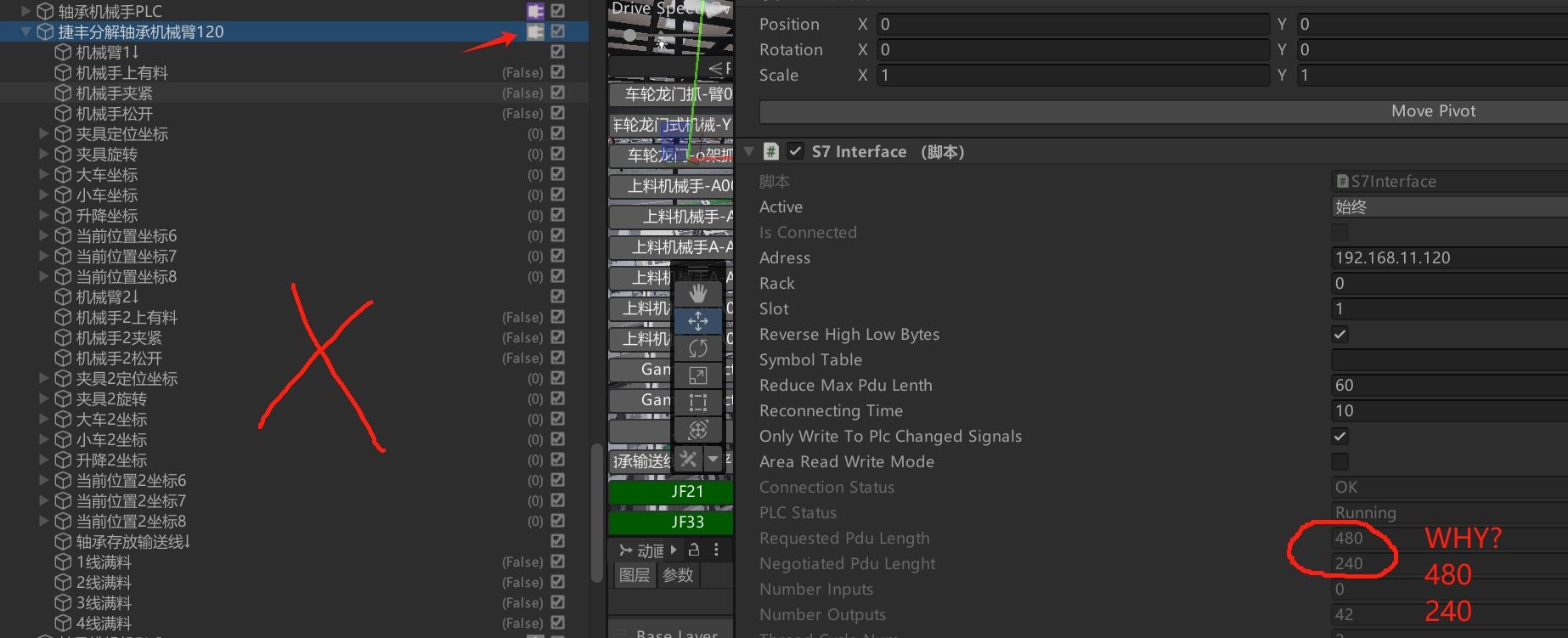
When using S7Interface, some S7Interface can connect to many points, and some S7Interface will be disconnected if the number of connections is too large, please see the picture, as if: Negotiated Pdu Lenght is related to this value. May I ask how Negotiated Pdu Lenght is set? Why is it 480 or 240? If Negotiated Pdu Lenght is 240, too many signals cannot be connected.
There is also a question about: how to use the Area Read Write Mode, if I need to read 56 points from the PLC's DB block and write 12 points, how should I fill in the configuration.
Looking forward to your reply very much!
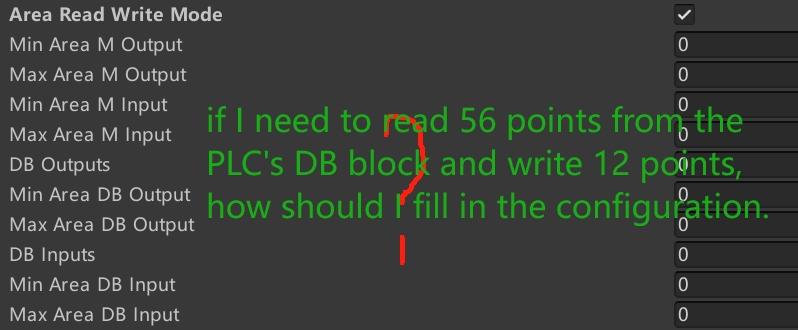
Hi, I can't tell you in detail why the negotiated Pdu lenght is like that. We use Sharp7 as a basis library for the S7 communication. I think this defines the length of the telegrams but it does not defines the number of the signals. If needed multiple telegrams are send for covering all signals. On AreaReadWrite Mode you sould enter min and max adress - so if your DB is 100.X to 140.X you should enter 100 and 140.
Customer support service by UserEcho
