Teilen Sie Ihre Erfahrunge und Wünsche mit uns und anderen Usern!

 About realizing digital twins for real stackers
About realizing digital twins for real stackers
Ask how to achieve a real-time digital twin of a real stacker and which component can change the real-time PLC position of the stacker in real time.

 Unity 6 support
Unity 6 support
Hello everyone,
is the most recent version of realvirtual compatible with Unity 6?


HMI_Slider: "SignalIntStart" is not used
Hello,
I want to use the HMI_Slider multiplexed. Basicially one slider for several signal sources.
Now I realized that the property "SignalIntStart" is unused.
I wanted to use this Signal to manipulate the slider value when multiplexed signal has changed.
Or do I misunderstand something?

Hi,
currently it isn't possible to enter values by keyboard using HMI-components. Those components only using signals from the PLC to set or get values. For having an element to enter values you have to set up your own UI using unity standard UI elements like canvas etc.. An example in realvirtual you'll find in realvirtual/UI. This is where our UI is implemented.
Thanks for the hint concerning "SignalIntStart", I'll fix this with the next release.
Best regards
Christin

Best practice for hiding gameobjects in scene and game mode
I converted a large CAD assembly of a machine to gameobjects. Many of these gameobjects, like the machine's enclosure, block the visibility of other gameobjects inside the machine.
I want to be able to change the visibility of these gameobjects and I want to learn what would be the best practice.
At the moment I created layers to group the gameobjects that I want to show/hide by showing/hiding the layer. This works for scene mode and also for game mode when I set the required culling mask on the camera. Would this be the best practice or would there a better way to do this?
The problem starts when I enable object selection in the realvirtual controller. All gameobjects will be visible in game mode when this option is enabled, without taking the culling mask into account. What should I do to only show the gameobject that I want in game mode?
Connected button isn't getting green (PlcSimAdvanced)
Hi!
The connection button isn't getting green while connection to PlcSimAdvanced is working.
After research I couldn't find the image of the green button neither the code why it should get green.
Can you please give me an advice for fixing this?
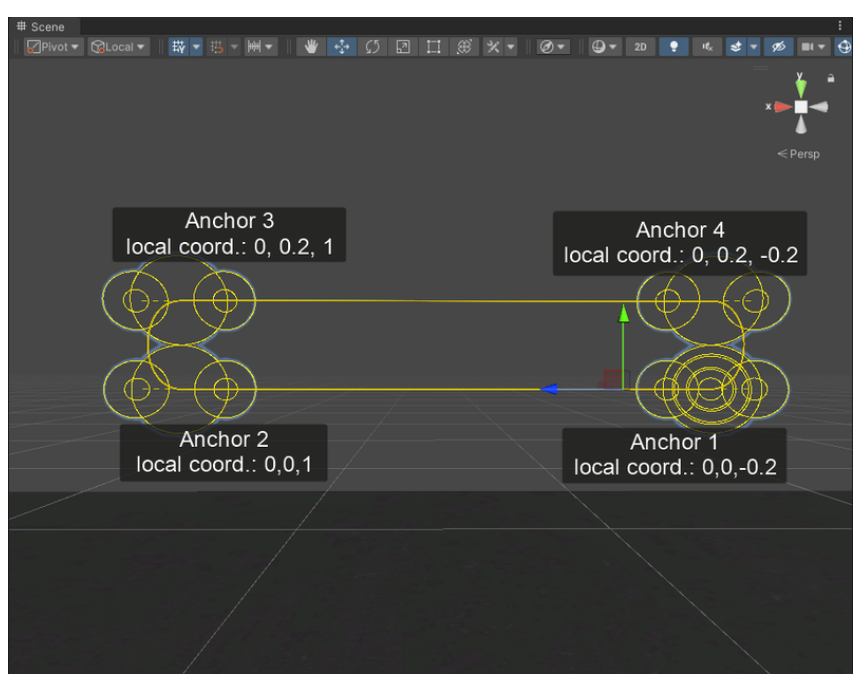
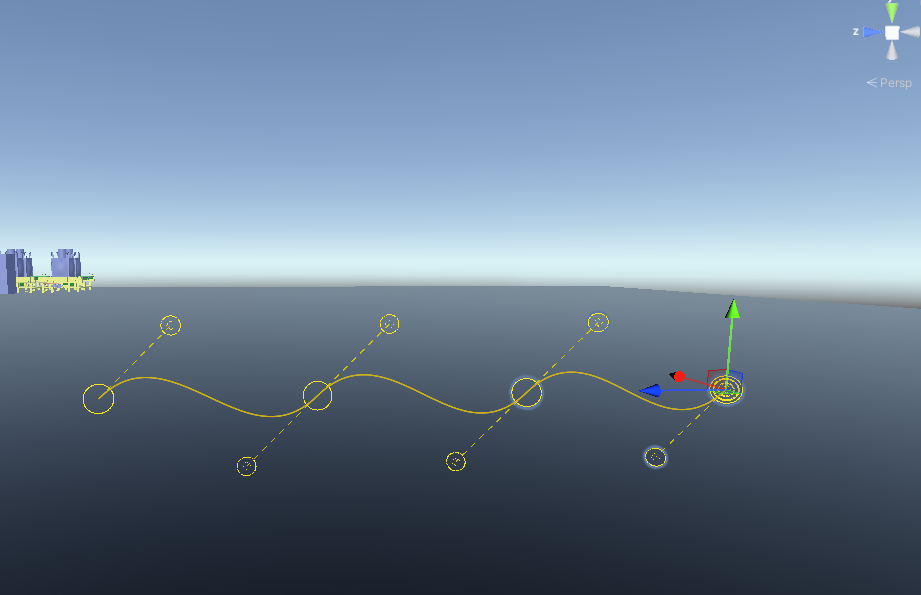
How to cancel IKPath to start another IKPath
Hello,
how can I properly cancel the currently running IKPath to start another Path. For example to force home positioning.
I want to cancel and start the paths by another script.
Best regards,
Andreas
Compile errors on MQTT interface
I wanted to do a fresh install of all the components:
- Unity Hub 3.9.1
- Unity 2022.3.49f1
- Realvirtual-Professional-2022.18
Up to this point everything is working fine.
I copy these folders into the assets directory
After adding REALVIRTUAL_BESTHTTP3 to the scripting define symbols I get compile errors:
After adding REALVIRTUAL_BESTMQTT3 to the scripting define symbols I get additional compile errors:
What did I do wrong and how can I fix it?
Customer support service by UserEcho
