Teilen Sie Ihre Erfahrunge und Wünsche mit uns und anderen Usern!
 Simulation is freezing every 10 seconds
Simulation is freezing every 10 seconds
Hello,
my simulation is freezing every 10 seconds, even with quality set to Very Low.
This happen in two different projects. What can I check to eliminate this problem?
Thanks!
 Linear guides creates excessive friction
Linear guides creates excessive friction
Hello,
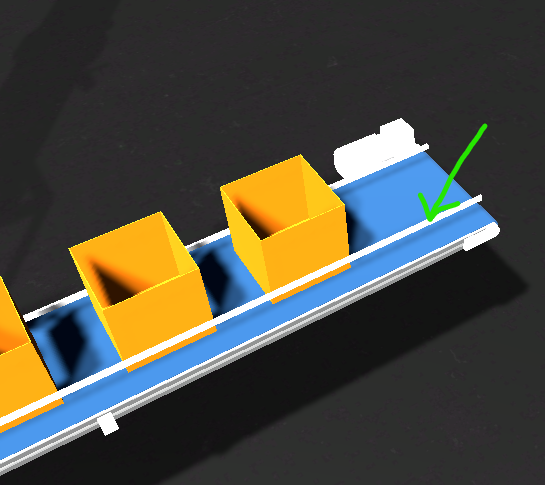
I have some problem with conveyor linear guides (see attached file).
Linear guides seems to create some friction on the boxes. Is there a way to set linear guides as 'slippery'?
Meta Quest 3 realvirtual documentation
Hey everyone.
I'm trying to implement a Meta Quest 3 in Unity with realvirtual. Is there any documentation available? I think I saw some when I was on your documentation website but the page can not be found anymore.

The documentation for developers is here:
https://doc.realvirtual.io/advanced-topics/mixed-reality-with-meta-quest3
We will soon release (in about 4 Weeks) a special Unity Package (realvirtual.io Imverse) bringing some special things which makes it really easy to place realvirtual.io Models into an AR environment on the MetaQuest3.

Using c# script to control logic
Hello,
I'm currently using c# scripts to control the logic of my scenes, but I'm having some problems.
My question is for the PLCOutputBool and PLCInputBool signal classes how the values change when the state changes.
For example, the PLCOutputBool class contains the Status property and the Value property, which in turn contains some value properties:
public StatusBool Status;
public struct StatusBool
{
public bool Connected;
public bool ValueOverride;
public bool Value;
[HideInInspector] public bool OldValue;
}
In your example script, I noticed that the value under PLCOutputBool is modified. However, during my debugging, I found that changing the Status.ValueOverride is required to alter the signal value of my PLCOutputBool.
How to prevent closing the build when pressing "Esc".
I'm wondering how to prevent closing my build when pressing "Esc". I think the function is somewhere inthe UI -> Toolbar Component of the realvirtual gameobject but I don't want to mess anything up by deleting files. Thanks in advance!
This function is in the 'realvirtualcontroller.cs' and cannot be controlled through the Inspector. If not desired, it can be commented out in the code by searching for 'KeyCode.Escape'. However, we do not recommend doing this.
Regards Christin
Questions about using gripper
Hello
I am currently trying to mimic the example in DemoGripping Scene to use the gripper component, but when I set up the group component and added the kinematic component I found that the mesh is not aligning to my model, which is causing me to not be able to align the Sensor on the Finger to my MU
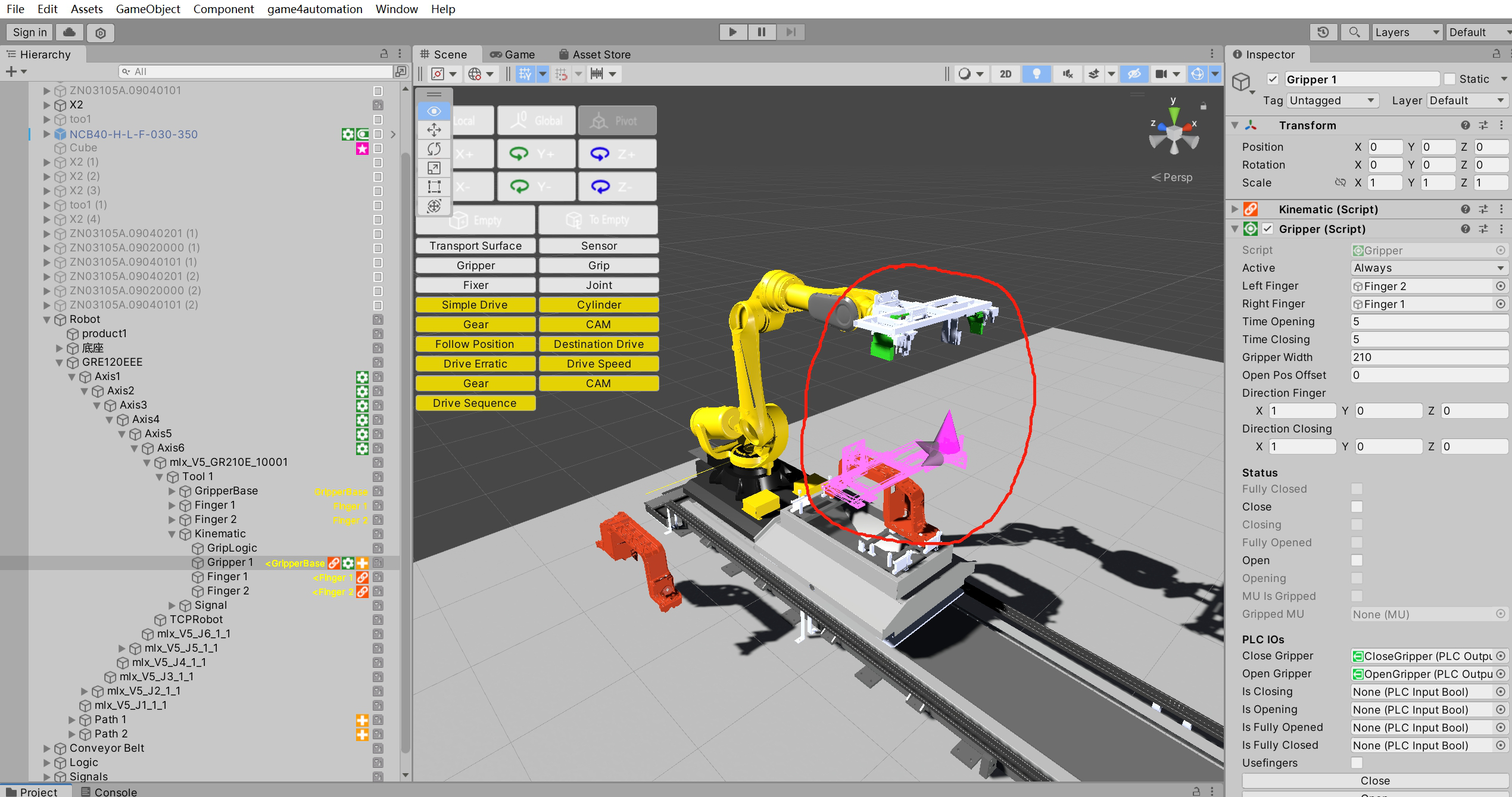
We will check this - it is a bug but it is only the Gizmo (you could turn it off) and it does not impacts any kind the function.
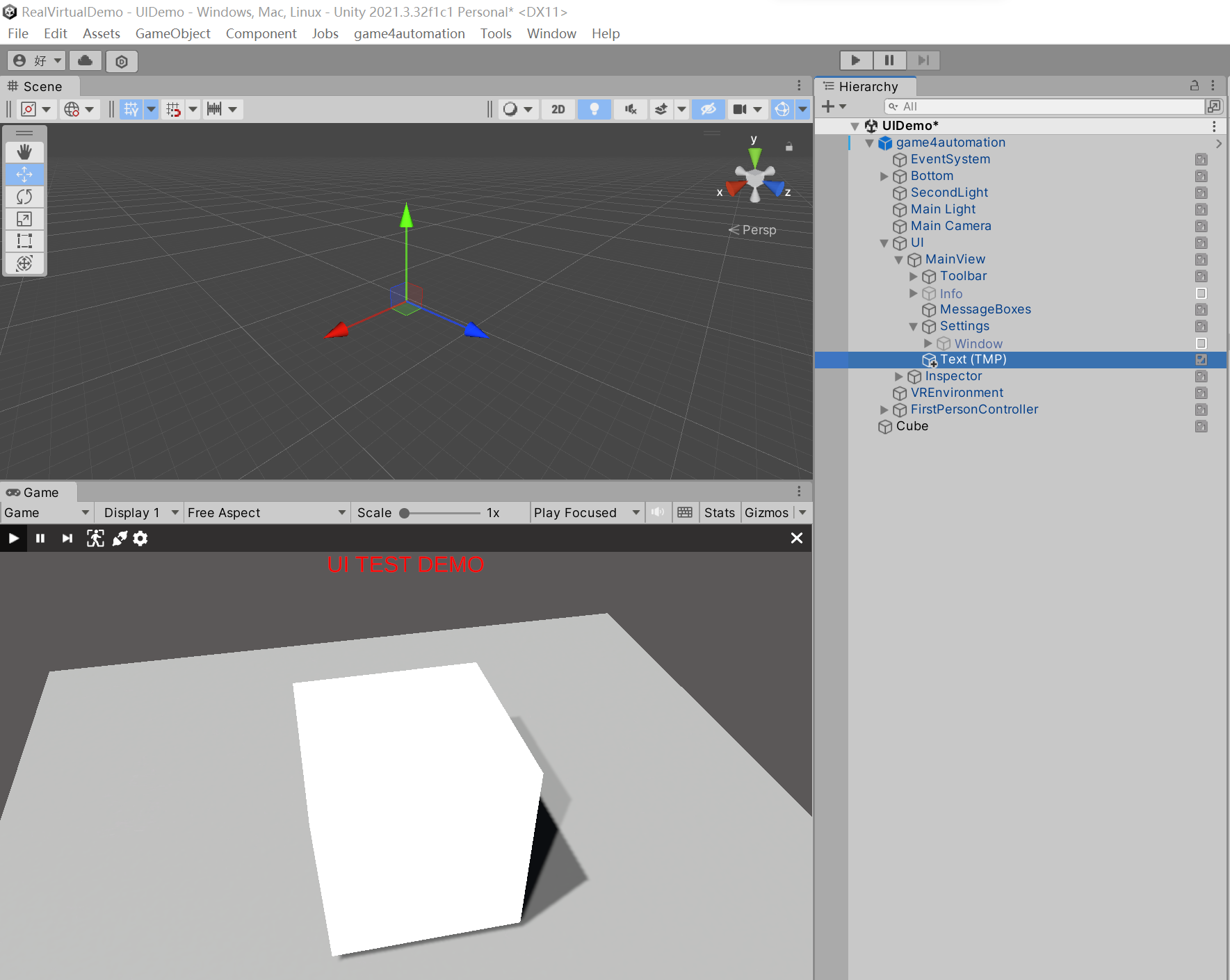
How to add custom UI
I would like to ask about how to add custom UI and buttons
I now want to try to add some custom buttons for my own functionality, but when I add a new Text text at the UI level under the game4automation object, I can't view his position in the edit screen. Usually I can view it in the edit screen and adjust his position and Canvas size, but now I can't see it in the realvirtual template project.
Can you tell me how I can get the UI object to show up in edit mode or how to implement a custom button to achieve the functionality I want for myself, I didn't find in the documentation how to do it.
Twincat Verbindung erst im Build herstellen
Guten Morgen und frohes Neues!
Ich habe einen fertigen Build, die das Twin Cat Ads Interface nutzt. Ist es möglich, die PLC Net Id und Port Eingabe so zu konfigurieren, sodass man erst im Build selbst diese Daten wie eine Art Login angibt? Das Ziel ist hierbei, dass jemand mit dem Build allein und der Beckhoff Steuerung die Verbindung aufbauen kann ohne Zugriff auf Unity selber.
Axis (Inverse Kinematics)
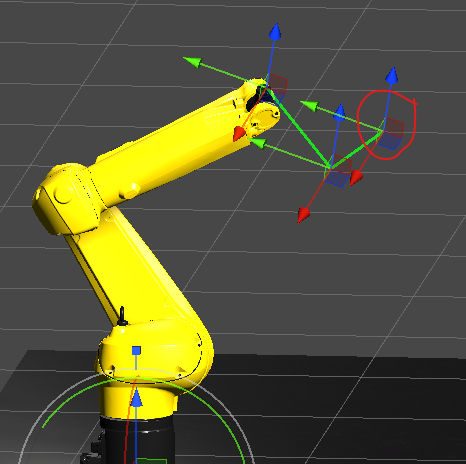
I've set all my axis in Blender and I exported the robot over. As the axis are already set I did the Drive and Constraints directly on each sub component of the robot.
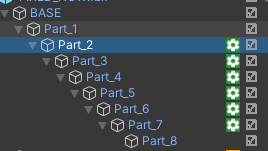
Will this create any problems for me?

Robot IK path to path bounce
Hi,
I've taken your prefab Stauebli robot and the path it comes with and simply made a second copy of the path then run the two paths in sequence by using Start Next Path. You can see in the video that the robot TCP jumps when transitioning from Path 1 to 2. Is there a way to correct this?
There are no Position Corrections applied or new TCP.
I have seen this in all the pathing that I have tried, regardless if Position Correction or new TCP is used. Some correction (bounce) happens when moving from one path to another.
It's a big issue because very often a path into a position is not the same as a path out (in a pick and place application) and this issue creates unusable behavior in this situation.
Thanks
Video https://i.imgur.com/hsgUAv5.gif


The issue is solved in a beta package, which is available to our customers. Will be included in the next release (upcoming 2022.10).
Customer support service by UserEcho

{kind=link}
{kind=link}