Teilen Sie Ihre Erfahrunge und Wünsche mit uns und anderen Usern!
 Simulation is freezing every 10 seconds
Simulation is freezing every 10 seconds
Hello,
my simulation is freezing every 10 seconds, even with quality set to Very Low.
This happen in two different projects. What can I check to eliminate this problem?
Thanks!
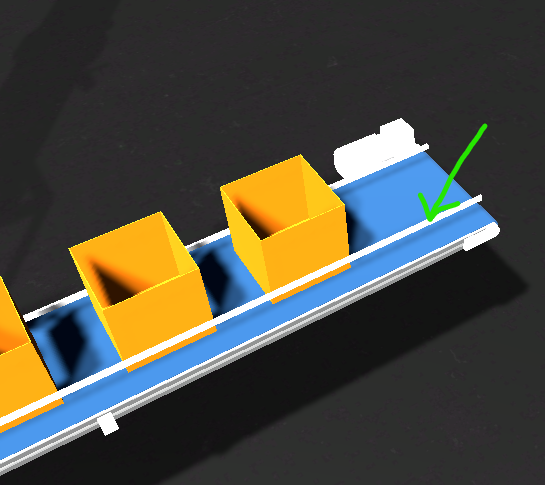
 Linear guides creates excessive friction
Linear guides creates excessive friction
Hello,
I have some problem with conveyor linear guides (see attached file).
Linear guides seems to create some friction on the boxes. Is there a way to set linear guides as 'slippery'?
Meta Quest 3 realvirtual documentation
Hey everyone.
I'm trying to implement a Meta Quest 3 in Unity with realvirtual. Is there any documentation available? I think I saw some when I was on your documentation website but the page can not be found anymore.

The documentation for developers is here:
https://doc.realvirtual.io/advanced-topics/mixed-reality-with-meta-quest3
We will soon release (in about 4 Weeks) a special Unity Package (realvirtual.io Imverse) bringing some special things which makes it really easy to place realvirtual.io Models into an AR environment on the MetaQuest3.

Gripper script stops working
When running the scene for extended periods of time we get the problem that the gripper script stops working. The sensor stop detecting MUs and it does not give any errors. Is there a problem in the background which comes up after running a scene for a long time?

IK Path could not complete the execution
Hi,
Now I have created two paths A and B using IK Path, when I repeat the signal quantity given to start for each path individually the paths can be executed correctly, but once I execute A and B alternately the paths are unreachable.
For example, I am using Signal Start to get path A to start moving, and Signal Ended to get if path A has finished executing. When Signal Ended is true for A, I start executing path B. It happens that path B can't finish execution and Signal Ended stays false.
This results in me not being able to control the robotic arm by itself to do the job I want to do, how can I solve this problem?
Using c# script to control logic
Hello,
I'm currently using c# scripts to control the logic of my scenes, but I'm having some problems.
My question is for the PLCOutputBool and PLCInputBool signal classes how the values change when the state changes.
For example, the PLCOutputBool class contains the Status property and the Value property, which in turn contains some value properties:
public StatusBool Status;
public struct StatusBool
{
public bool Connected;
public bool ValueOverride;
public bool Value;
[HideInInspector] public bool OldValue;
}
In your example script, I noticed that the value under PLCOutputBool is modified. However, during my debugging, I found that changing the Status.ValueOverride is required to alter the signal value of my PLCOutputBool.
Reading a NULL value causes disconnection
Hello,
Every time a node I'm subscribed to is read as null, the client disconnects. The type of the node I'm trying to read is a float if that matters.
OPCUA Interface - Subscription with ClientHandle 78 Value Changed ns=2;s=NodeA Value [25,1]
OPCUA Interface - Subscription with ClientHandle 80 Value Changed ns=2;s=NodeB Value [140305,5]
OPCUA Interface - Subscription with ClientHandle 80 Value Changed ns=2;s=NodeB Value [140207,5]
OPCUA Interface - Subscription with ClientHandle 88 Value Changed ns=2;s=NodeC Value [NULL]
OPCUA Interface - Client Disconnected
This happens with any node, whenever a value is written as [NULL]
Any help would be appreciated about how to make it so that the program doesn't crash.
Thank you.
OPC UA reconnects only once, Realvirtual professional
Good morning,
We are having problems with the OPC UA connection.
When the OPC server is turned off and on again the connection is reestablished correctly, but only once since startup, if the server disconnects a second time the connection is never reestablished.
How can we solve the problem?
Thank you.
How to prevent closing the build when pressing "Esc".
I'm wondering how to prevent closing my build when pressing "Esc". I think the function is somewhere inthe UI -> Toolbar Component of the realvirtual gameobject but I don't want to mess anything up by deleting files. Thanks in advance!
This function is in the 'realvirtualcontroller.cs' and cannot be controlled through the Inspector. If not desired, it can be commented out in the code by searching for 'KeyCode.Escape'. However, we do not recommend doing this.
Regards Christin
Can't import nodes of Beckhoff OPC UA Server in Unity Editor
Hello,
I recently purchased realvirtual for Unity and I am trying to get familiar with the demo application.
For future projects it is necessary to keep up OPC UA connections with Beckhoff TwinCat PLCs and Siemens PLCs.
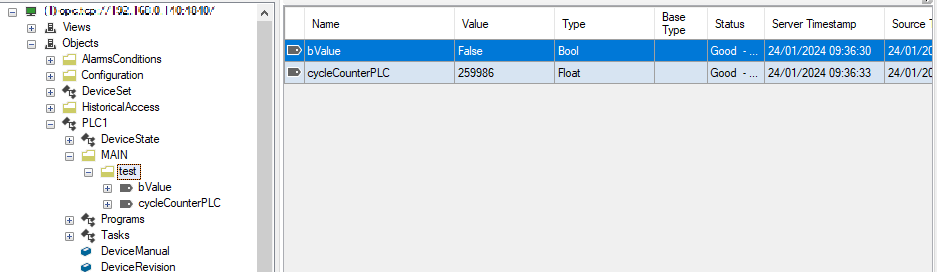
For now I work with a Beckhoff PLCs that runs demo code and a OPC UA server on it.
Connecting to the OPC UA Server with OpcWatch or UaExpert is no issue (security = None)
My Unity configuration looks like this:
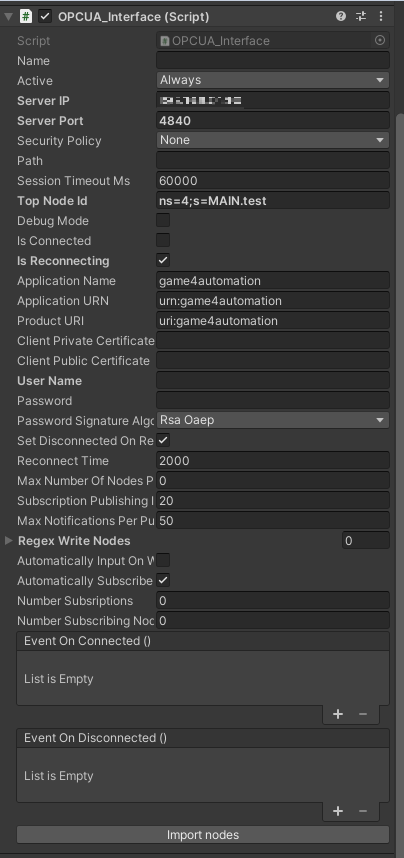
However trying to connect in the Unity Editor results in the following error message.
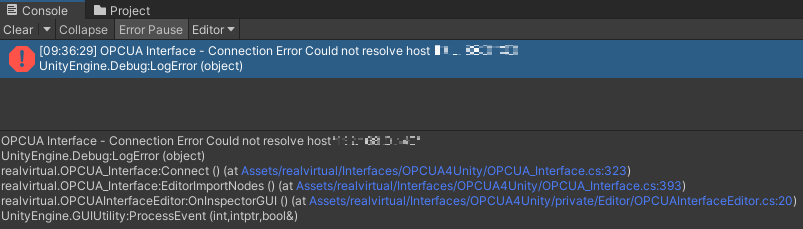
I tried applying standard setting and also connecting to a local python opc ua server without success.
Connecting to the PLC with the TwinCATInterface object however worked well (for future applications a wireless connection on android devices are mandatory).
Unity Version: 2022.3.14f1
realvirtual version: release 2022.07 07. September 2023
I hope I delivered sufficient information.
Thanks in advance.
BatuOx4S
Customer support service by UserEcho

{kind=link}